







1 激光雷达应用广泛,汽车有望成最大催化
激光雷达(LiDAR)是一种主动遥感技术,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,来分析目标地物表面的反射能量大小、反射波谱的幅度、频率和相位等信息,进而实现对目标物体的精确定位、识别以及一些特性的检测,主要可以用于自动驾驶、智慧城市等领域。
激光雷达的工作原理是利用激光发射器发射激光束,然后通过接收器接收从目标物体反射回来的激光信号,从而测量出目标物体的距离、方向、高度等信息。激光雷达可以用于自动驾驶、机器人、测绘等领域,具有高精度、高分辨率、高可靠性等优点。
图表1:激光雷达工作原理
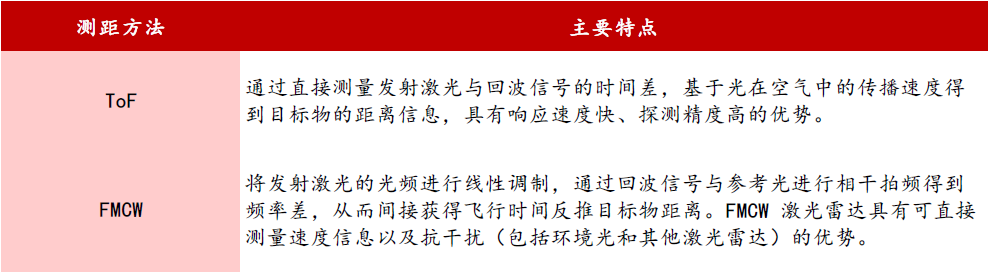
激光雷达按照测距方法可以分为飞行时间(Time of Flight,ToF)测距法、基于相干探测的FMCW 测距法、以及三角测距法等,其中ToF 与FMCW 能够实现室外阳光下较远的测程(100-250m),是车载激光雷达的优选方案。ToF 是目前市场车载中长距激光雷达的主流方案,未来随着 FMCW 激光雷达整机和上游产业链的成熟,ToF 和 FMCW 激光雷达将在市场上并存。
图表2:激光雷达按测距方法分类
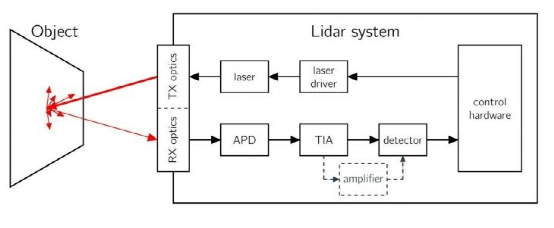
图表3:TOF 激光雷达结构
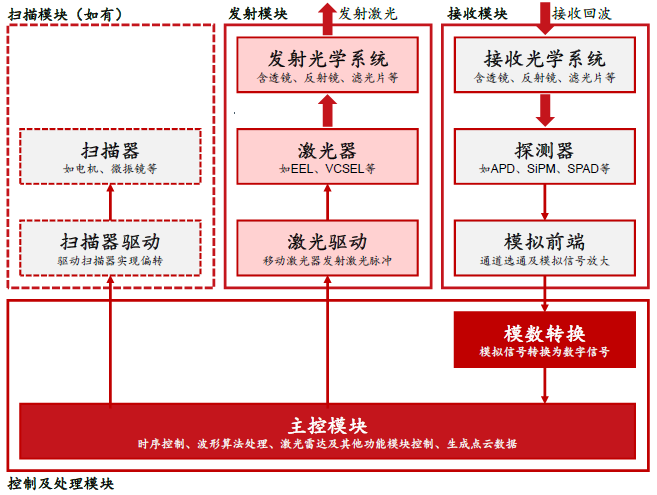
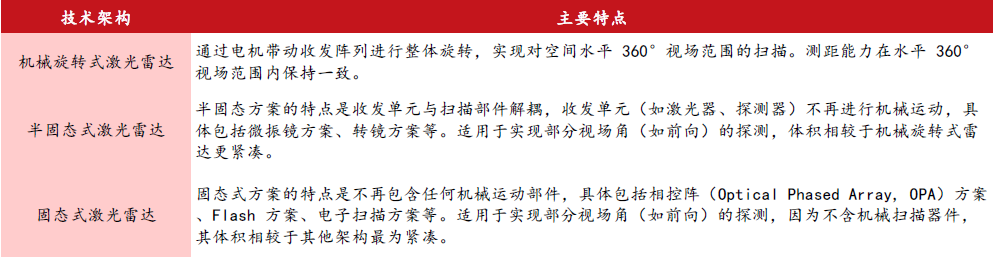
根据技术架构的差异,激光雷达主要分为机械式激光雷达、半固态式激光雷达以及固态式激光雷达。
图表4:激光雷达按技术架构分类
激光雷达自诞生以来,紧跟底层器件的前沿发展,不断引入新的技术架构,从激光器发明之初的单点激光雷达到后来的单线扫描激光雷达,以及在无人驾驶技术中获得广泛认可的多线扫描激光雷达,再到技术方案不断创新的固态式激光雷达、FMCW 激光雷达,技术路径持续创新。
图表5:激光雷达分类
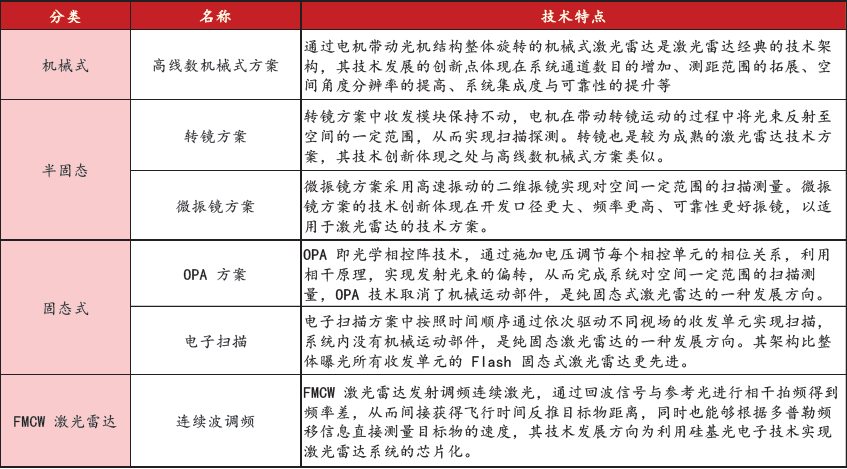
图表6:激光雷达方案技术特点
1.1 机械式激光雷达
机械旋转式激光雷达通过电机带动收发阵列进行整体旋转,实现对空间水平360°视场范围的扫描。机械旋转式激光雷达的优点是扫描速度快、精度高,适用于远距离探测和高速运动目标的跟踪。但是其结构相对复杂,维护成本高,且需要精确的对准和校准,造成其短期可能无法在乘用车上大批量的使用。
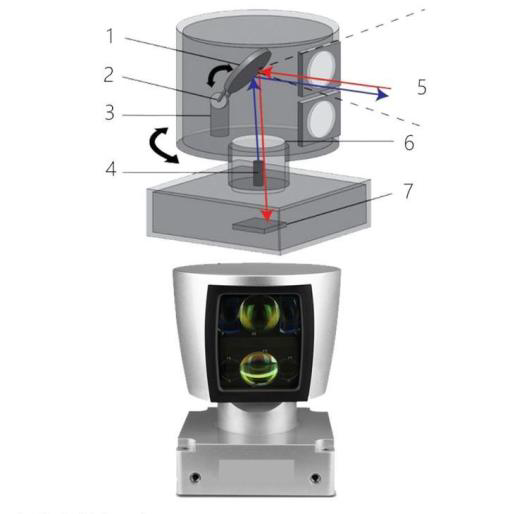
图表7:机械式激光雷达工作原理
1.2 固态激光雷达
固态激光雷达使用固态激光器,可以输出高质量而稳定的激光束,能够实时捕捉和处理光点数据,有效提高了雷达精度;同时固态激光雷达没有机械运动部件,相比于旋转激光雷达,其寿命更长且故障率更低。
然而,固态激光雷达也有一些缺点:探测距离相对较短:由于其工作原理的限制,固态激光雷达的探测距离一般较短,可能无法满足远距离探测的需求。固态激光雷达的视场角一般较小,可能无法覆盖较大的角度范围。
A. Flash 激光雷达:主要通过短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器完成对环境周围图像的绘制。其优点在于快速记录整个场景,体积小,缺点主要在于激光功率受限、探测距离较近。
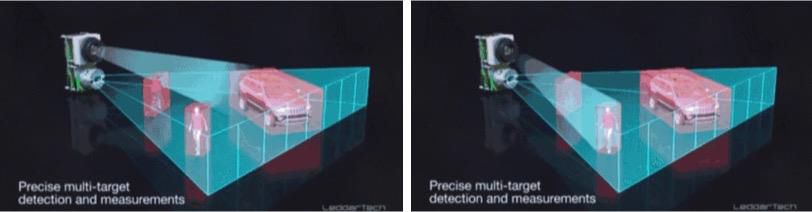
图表8:Flash 激光雷达工作原理
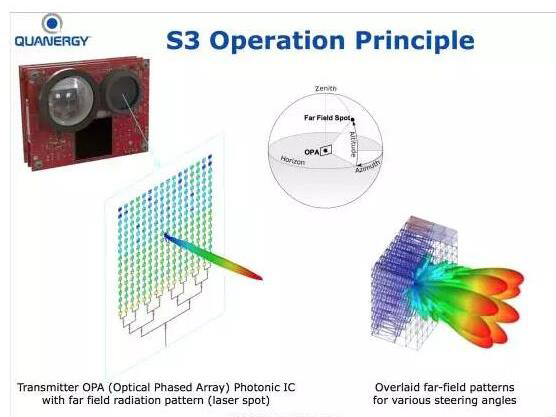
B.光学相控阵激光雷达:采用光学相控阵天线代替传统的机械扫描系统,可以实现高速度、高精度的三维成像。其利用多个小型激光器并列排列,通过控制每个激光器的发射时间和相位,实现激光束在空间上的合成,形成所需的扫描图案。相比传统的机械扫描激光雷达,光学相控阵激光雷达具有更高的扫描速度和更长的扫描距离。同时具有更高的精度和灵活性。
然而,光学相控阵激光雷达制造工艺较为复杂,成本较高,同时其性能也受到光源质量、光学元件质量和控制系统精度等因素的影响。
图表9:Quanergy 光学相控阵激光雷达工作原理
1.3 半固态激光雷达
半固态激光雷达具有一些显著的优点,例如半固态激光雷达利用多个光源组成阵列,实现对不同方向的快速扫描,因此具有较高的扫描速度;通过控制光源的阵列,可以实现对特定方向的光束进行精确合成,从而获得高精度的测量结果。半固态激光雷达由于没有机械运动部件,因此体积较小,可以较好的融入到车的外观中去,但是由于半固态激光雷达扫描的是非结构化数据,因此需要采用更为复杂的算法进行处理,增加了数据处理的难度和计算量。
A. MEMS 振镜激光雷达:采用MEMS 振镜作为激光光束扫描元件,反射镜以一定谐波频率振荡,由旋转的微振镜来反射激光器的光线,从而实现扫描,具有体积小、宏观结构简单、可靠性高、功耗低等优势,是目前激光雷达实现落地应用的较合适的技术路径。
B. 转镜方案:采用转镜作为激光光束扫描元件,工作原理是将激光束照射到转镜上,通过转镜的旋转来扫描目标物体,可以实现不同角度的扫描。具有高精度、高分辨率、可靠性高等优点。但是由于转镜方案的制造工艺较为复杂,因此成本相对较高。
1.4 FMCW 激光雷达
相比传统的基于飞行时间(ToF)的脉冲激光雷达,FMCW 激光雷达基于相干探测方法,通过发出连续的激光束,并控制激光束的频率随着时间变化,形成一定的调频曲线,可以响应目标运动引起的多普勒频移,提供目标的瞬时视向速度,FMCW激光雷达具有更高的精度和分辨率,同时也具有更强的抗干扰能力。
图表10:FMCW 激光雷达工作原理
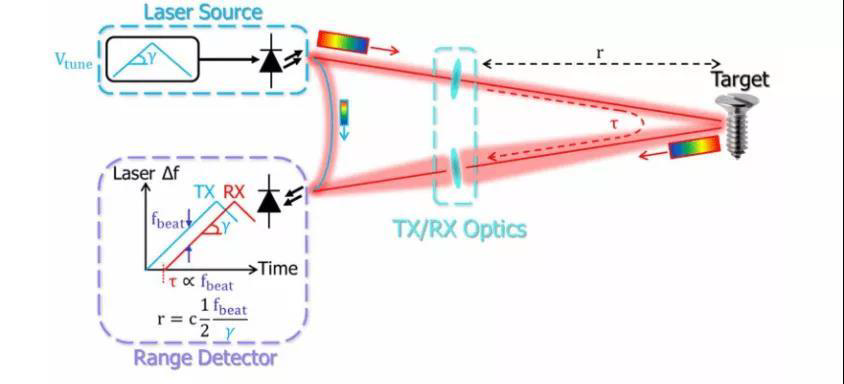
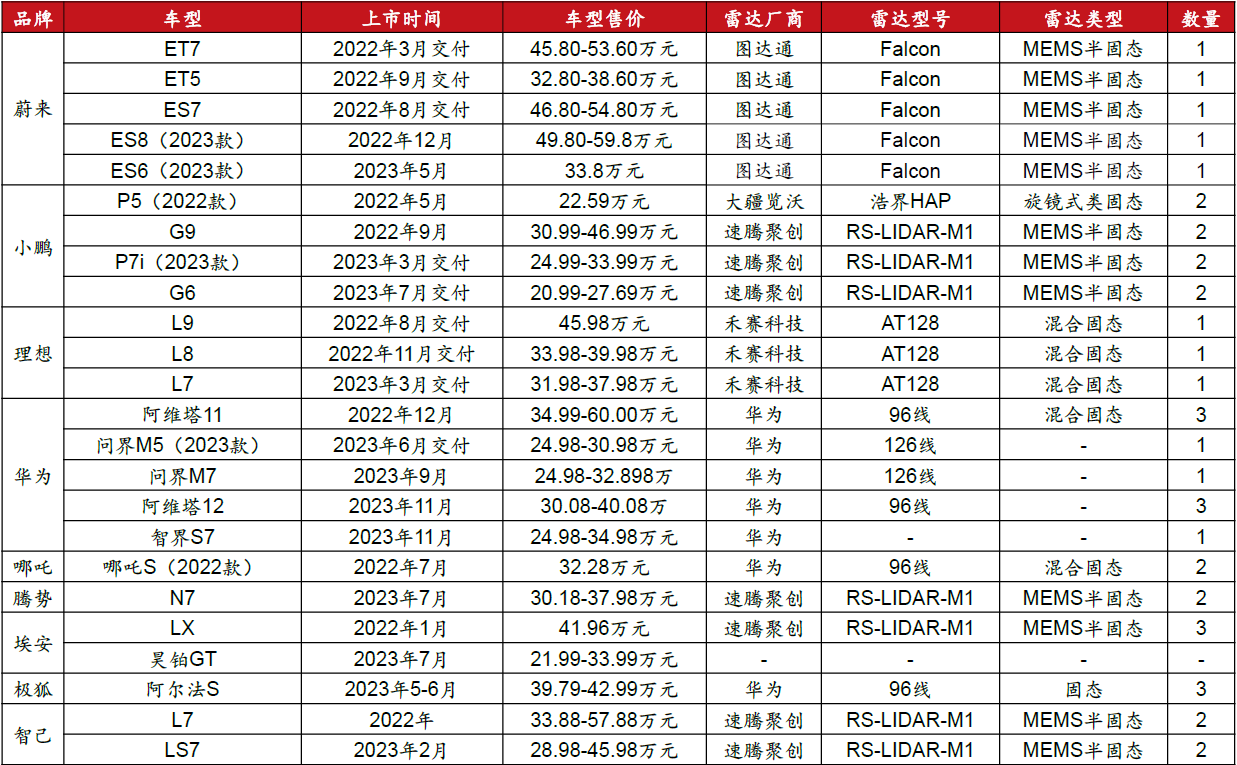
FMCW 激光雷达的接收和扫描中也需要用到硅光芯片,由于硅光芯片既能导电又能导光,因此它既具有光电探测器的功能,又具有调制解调的功能,从而使得整个系统集成化、小型化。由中国信息通信研究院技术与标准研究所编撰的《车载激光雷达技术与应用研究报告(2023 年)》统计,截止到2023 年第三季度,已有36家中国车企宣布使用激光雷达,预计国内将有高达106 款搭载激光雷达的车型上市,占全球同期预计发布搭载激光雷达新车型总数量近90%,中国车企在激光雷达领域将持续引领着行业的创新。
图表11:重点车型激光雷达搭载情况
2 海外巨头跟踪:洗牌加速,新技术持续落地
行业内主要的激光雷达公司包括美国的 Velodyne、Luminar、Aeva、Ouster,以色列的 Innoviz,德国的 Ibeo,以及国内的速腾聚创、禾赛科技、图达通、华为等。在行业发展早期国外公司为技术主导,但近几年国内激光雷达公司投入大量研发,逐步完成了技术的追赶甚至在一定范围内实现超越。
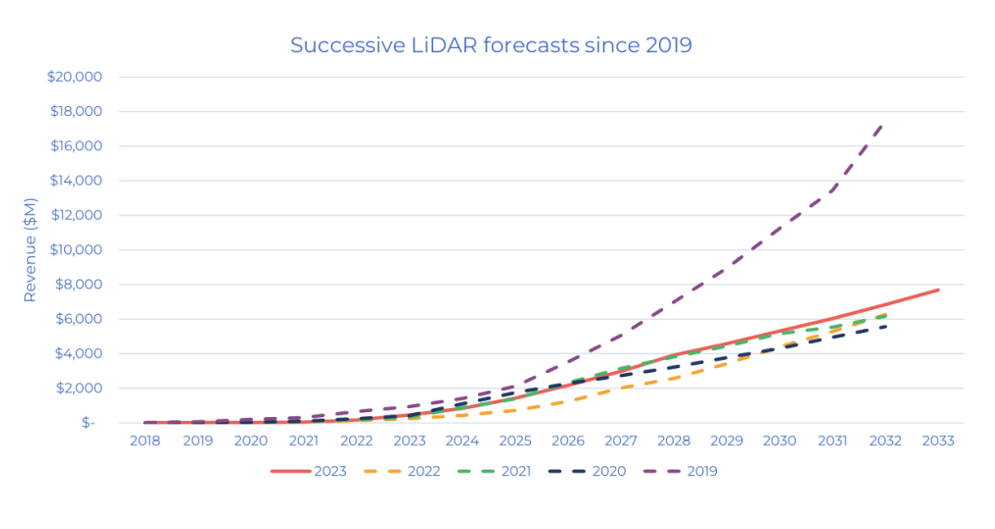
根据Yole Intelligence 发布的《2023 年全球车载激光雷达市场与技术报告》,调高了对乘用车和轻型商用车激光雷达市场的中长期预测:到2030 年,乘用车和轻型商用车激光雷达市场将到达53 亿美元,比去年预测的高出10 亿美元。
图表12:激光雷达全球市场空间预测
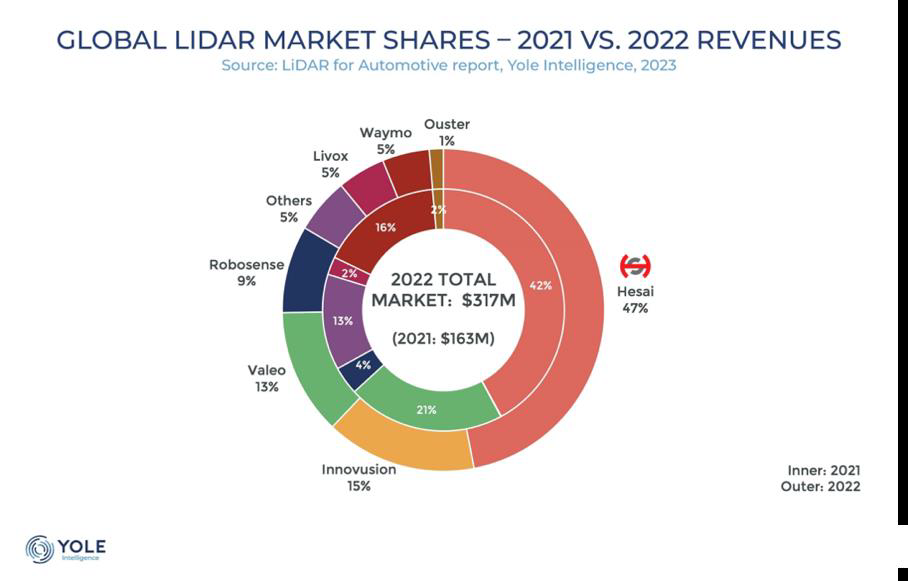
从全球激光雷达市场格局来看,2022 年,禾赛以近50%的市场份额连续两年稳居全球车载激光雷达总营收榜首,并且其市场份额从2021 年的42%进一步扩大至47%。图达通则依靠蔚来汽车的持续出货,以15%的市场份额夺得第二名,法雷奥、速腾聚创分别以13%、9%的市场份额位列第三、第四。
图表13:激光雷达全球竞争格局
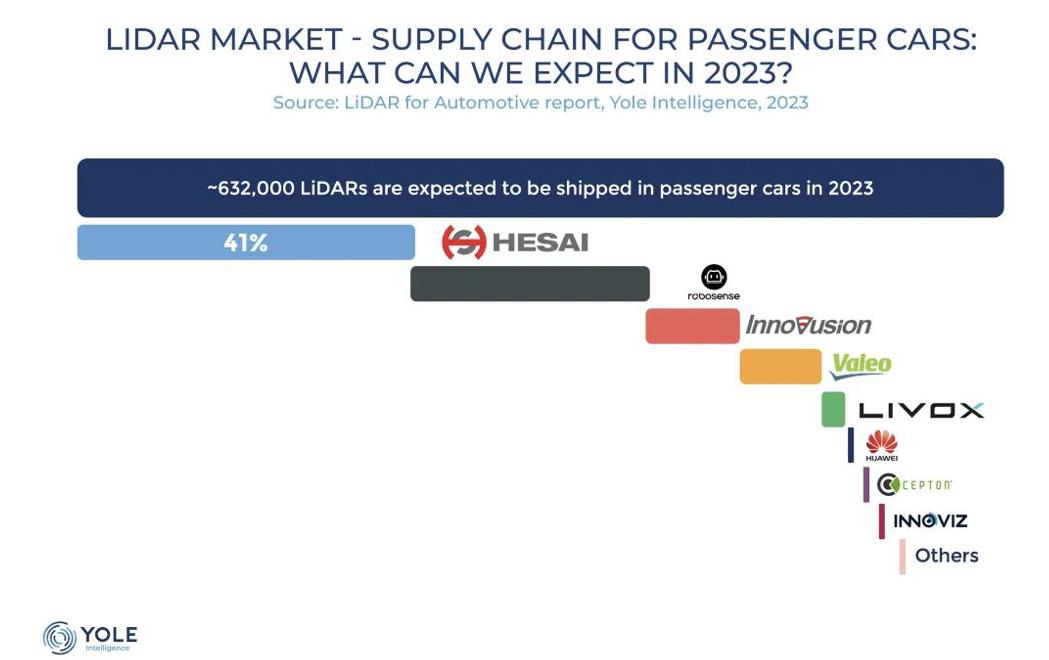
随着中国智能驾驶行业快速崛起,ADAS 功能量产规模进一步扩大,国内头部车企对激光雷达的需求猛增,Yole 预测2023 年全球车载激光雷达市占率前五的厂商中,前三名都会是中国企业,分别是禾赛、速腾聚创和图达通。剩下约20%的份额则由法雷奥、大疆览沃、华为、Cepton、Innoviz 等多家公司瓜分
图表14:激光雷达2023 年市场份额预测
2.1 Innoviz:与宝马深入合作,获大众40 亿美元订单
以色列激光雷达传感器研发商Innoviz 成立于2016 年,由来自以色列国防军情报部队精英技术部门的四位联合创始人创建。该公司专注于研发固态激光雷达(LiDAR)传感器,致力于为自动驾驶和高级驾驶辅助系统(ADAS)市场提供创新的解决方案。
Innoviz 的激光雷达传感器在市场上具有较高的竞争力,已被多家知名汽车制造商和自动驾驶技术公司选用。2017 年宣布与全球第三大代工厂 Jabil(捷普)合作,2018 年宣布与 Magna(麦格纳)合作宝马项目,并于为宝马2021 年推出的L3 量产车提供激光雷达。2022 年8 月以色列激光雷达公司Innoviz 宣布,将向大众汽车集团旗下的CARIAD 提供激光雷达硬件和配套软件,交易总价达40 亿美元,预计2025 年开始交付。
Innoviz 旗下共有三大产品线:1)InnovizOne:最远探测距离250 米,适用于L3-L5 级汽车;2)InnovizTwo:成本较InnovizOne 降低了70%以上,同时性能显著提升,主要针对L2+级市场,L3-L4 亦适用,将应用于大众等品牌;3)Innoviz360:性能、成本和耐用性都得到显著提升,最远探测距离300m,主要针对L4/5 级自动驾驶,计划2024 年量产。
2.2 Luminar:加速全球化工厂布局
Luminar 是一家美国激光雷达公司,由Austin Russell 在2012 年创立,专注于MEMS 混合固态激光雷达领域。该公司在1550nm 波长持续深耕,主要产品为Iris和Hydra。其中,Hydra 是上一代激光雷达产品,主要用于测试和开发;公司最新的车规级产品Iris 于2022 年量产,与沃尔沃达成供应协议,用于 2022 年上市的自动驾驶系统。Luminar 已经与多家汽车制造商合作,包括奔驰、沃尔沃、奥迪、丰田研究院、英特尔的 Mobileye、空客以及上汽集团 和 AV 运营商小马智行等重要客户。
图表17:美国激光雷达公司Luminar

Luminar 今年三月在投资者日活动推出了新版本的 Iris 传感器,公司称其具有300 米(984 英尺)的检测范围,Luminar 正在与梅赛德斯合作,将Iris Plus 激光雷达集成到其车辆中,预计将于2025 年开始量产。同时Luminar 计划在亚洲开设一家制造工厂以支持生产。墨西哥工厂也于今年第二季度开始上线,Luminar还与合同制造商 Fabrinet 一起扩建泰国的另一家工厂以生产光学组件。
2.3 Velodyne&Ouster:合并经营,竞争格局快速洗牌
美国Velodyne 是一家位于加州硅谷的技术公司,以激光雷达传感器技术为核心,提供自动驾驶解决方案。公司由David Hall 于1983 年创立,早期以音响业务起家,后来逐渐将业务拓展至激光雷达领域。2021 年全年,Velodyne 出货量达到了15000 多个,其中有2400 多个是固态传感器,大部分为机械激光雷达。根据2022 年Velodyne 官网的合并公告,Ouster 与Velodyne 完成“对等合并”,新公司继续使用Ouster 的名字,合并后的公司将拥有850 多家现有客户、丰富的专利组合。但是后续随着图达通、法雷奥、禾赛科技、速腾、华为等厂商的快速崛起,曾占据全球激光雷达市场80%以上份额的Velodyne 市占率缩水。
2.4 Aeva:FMCW 技术领先者,产品有望后年投产
Aeva 的激光雷达传感器采用先进的调频连续波(FMCW)技术,可以实现高精度的距离和速度测量,以及高分辨率的点云成像。这使得传感器能够准确检测和识别车辆周围的所有物体,包括行人、车辆和障碍物,最远可以探测到500 米外的物体。2021 年1 月,Avea 与日本电装宣布达成合作协议,双方将共同推进FMCW(调频连续波)激光雷达的量产,目标是满足大众市场的需求。Aeva 联合创始人兼首席执行官表示,公司已拿到全球前十车企的定点,量产车型预计在2025 年投产。
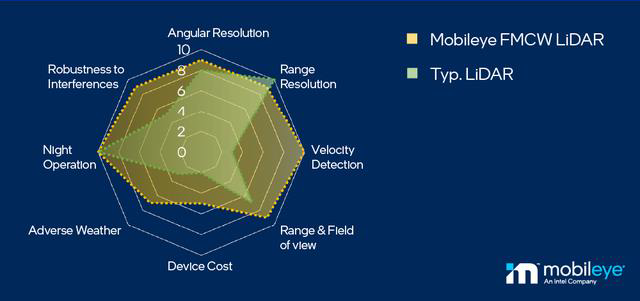
图表24:Mobileye FMCW 激光雷达性能表现


















 2224
2224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











