







 本文详细介绍了如何在CloudCompare中操作,从导入OBJ模型开始,生成预设点云,保存为PCD格式,并提到如何处理点云密度问题,包括滤波方法。最后指出MeshLab不支持点云文件的打开。
本文详细介绍了如何在CloudCompare中操作,从导入OBJ模型开始,生成预设点云,保存为PCD格式,并提到如何处理点云密度问题,包括滤波方法。最后指出MeshLab不支持点云文件的打开。
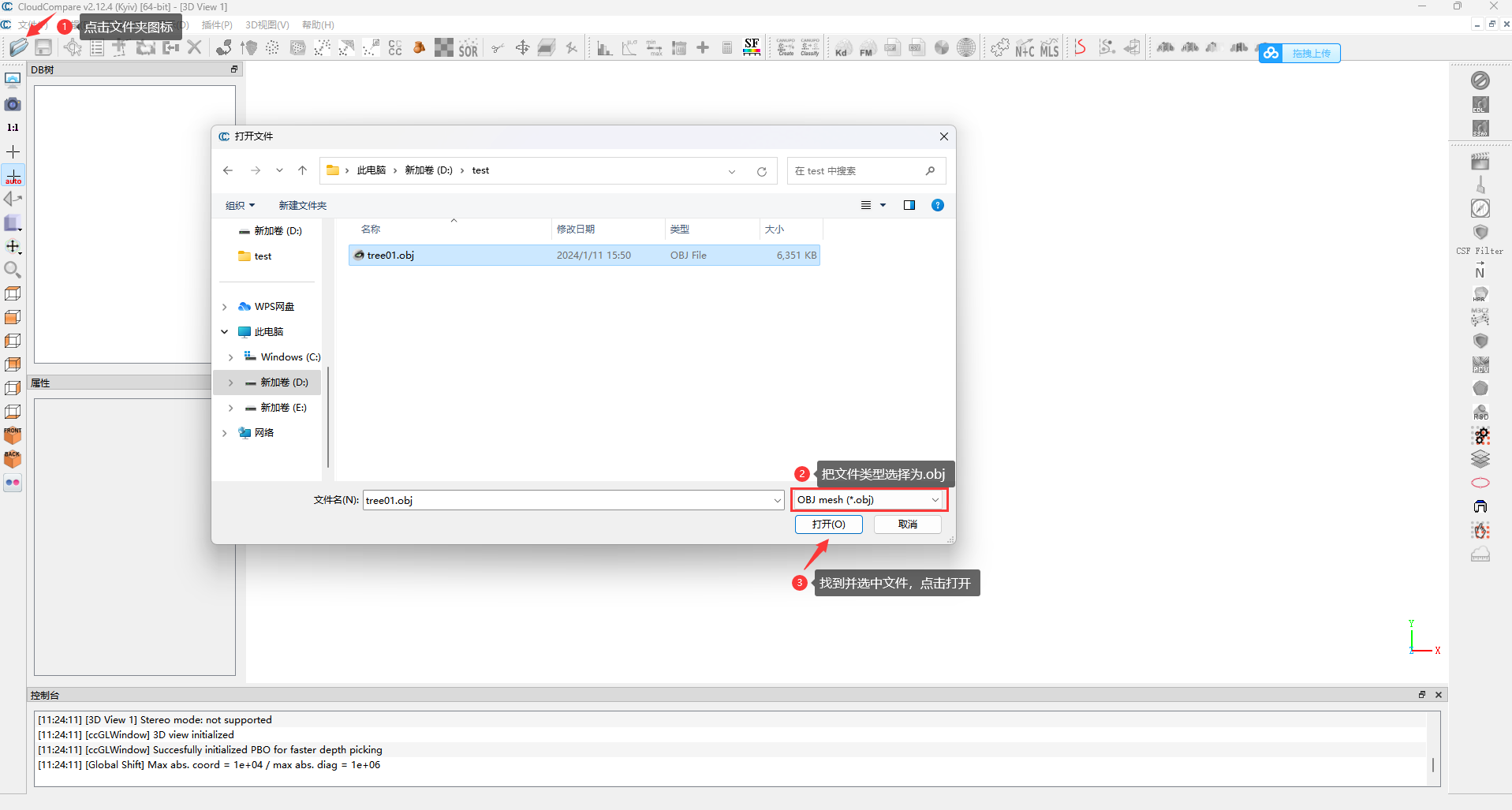
1.打开CloudCompare,点击文件夹图标,首先先把文件类型选择为.obj,然后再去找预处理的obj网格模型,点击打开。
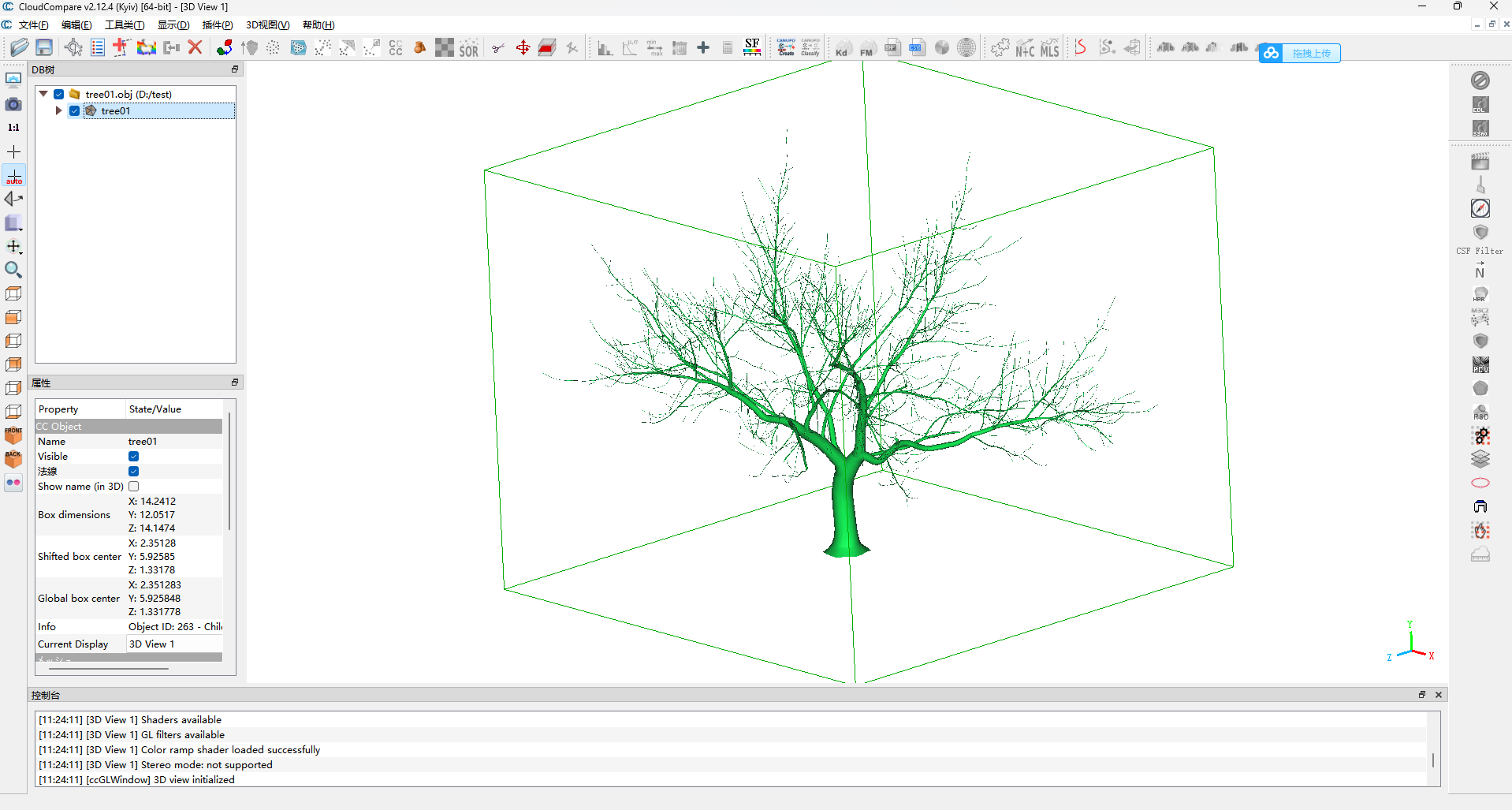
2.测试打开的obj网格模型如下图:
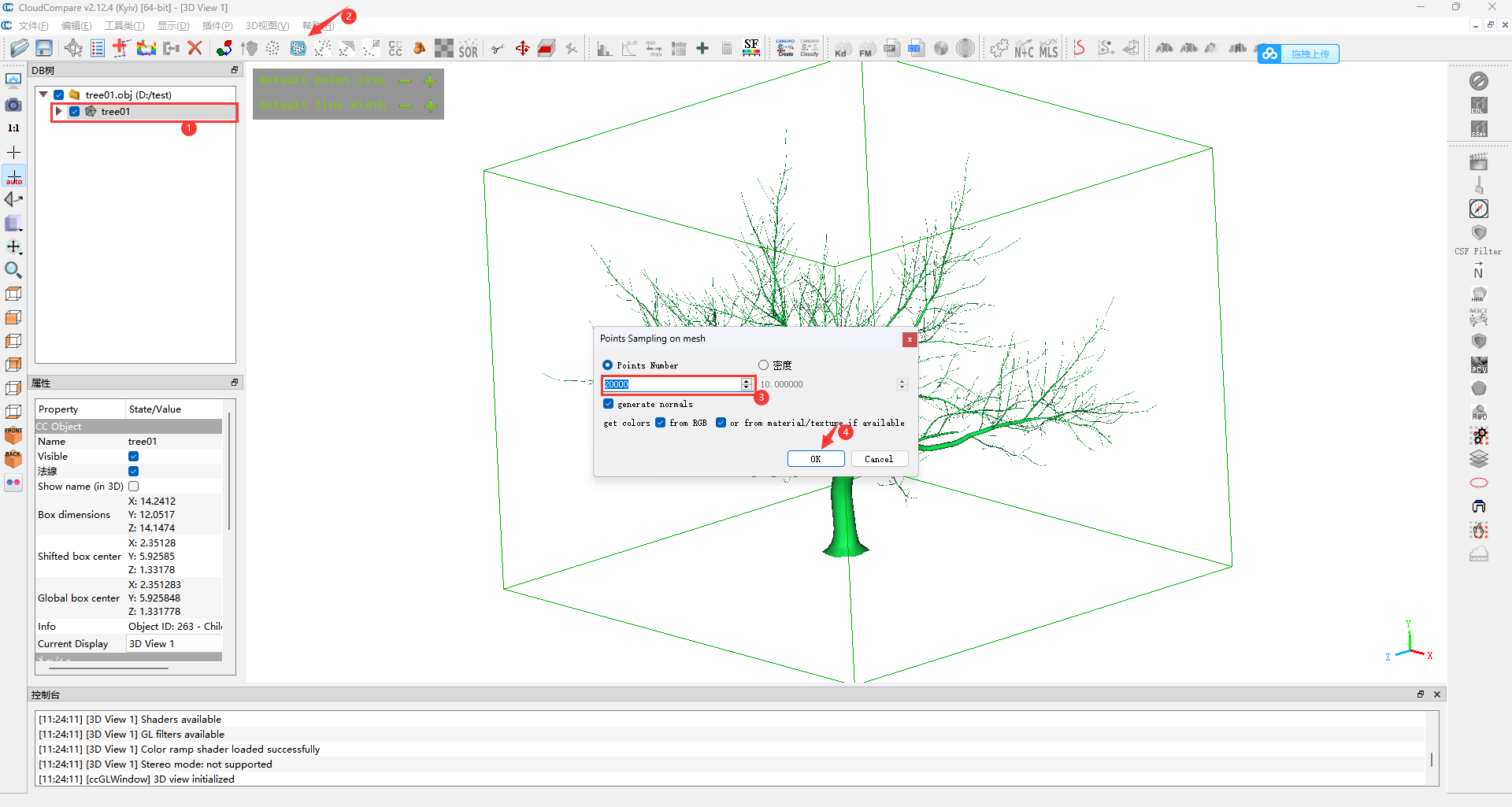
3.选中obj文件,点击网格上样本点的图标,输入预生成的点云数量(默认1000000点),点击ok。
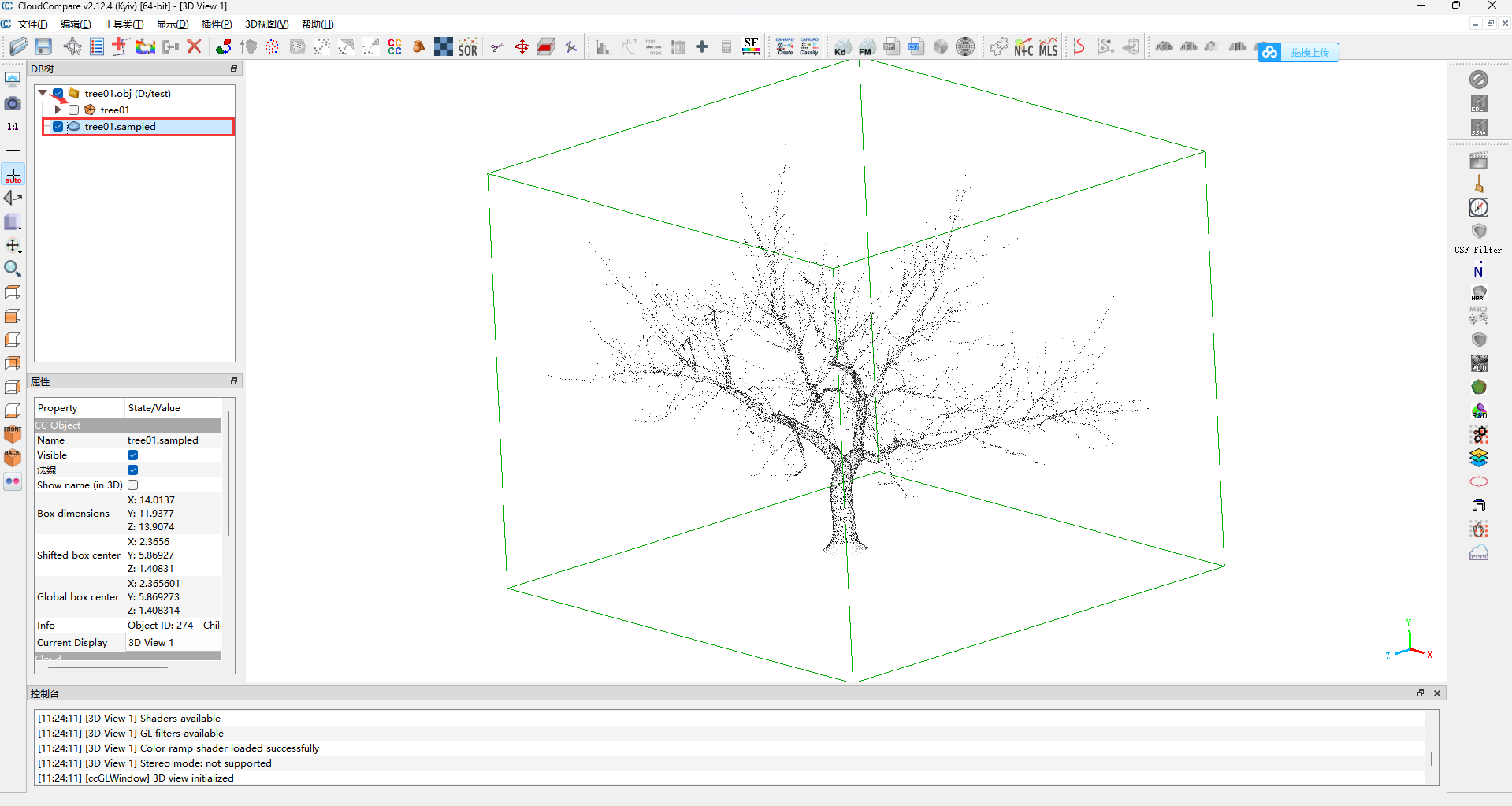
4.取消obj网格模型的显示,选中点云模型,就能看到生成的点云模型。
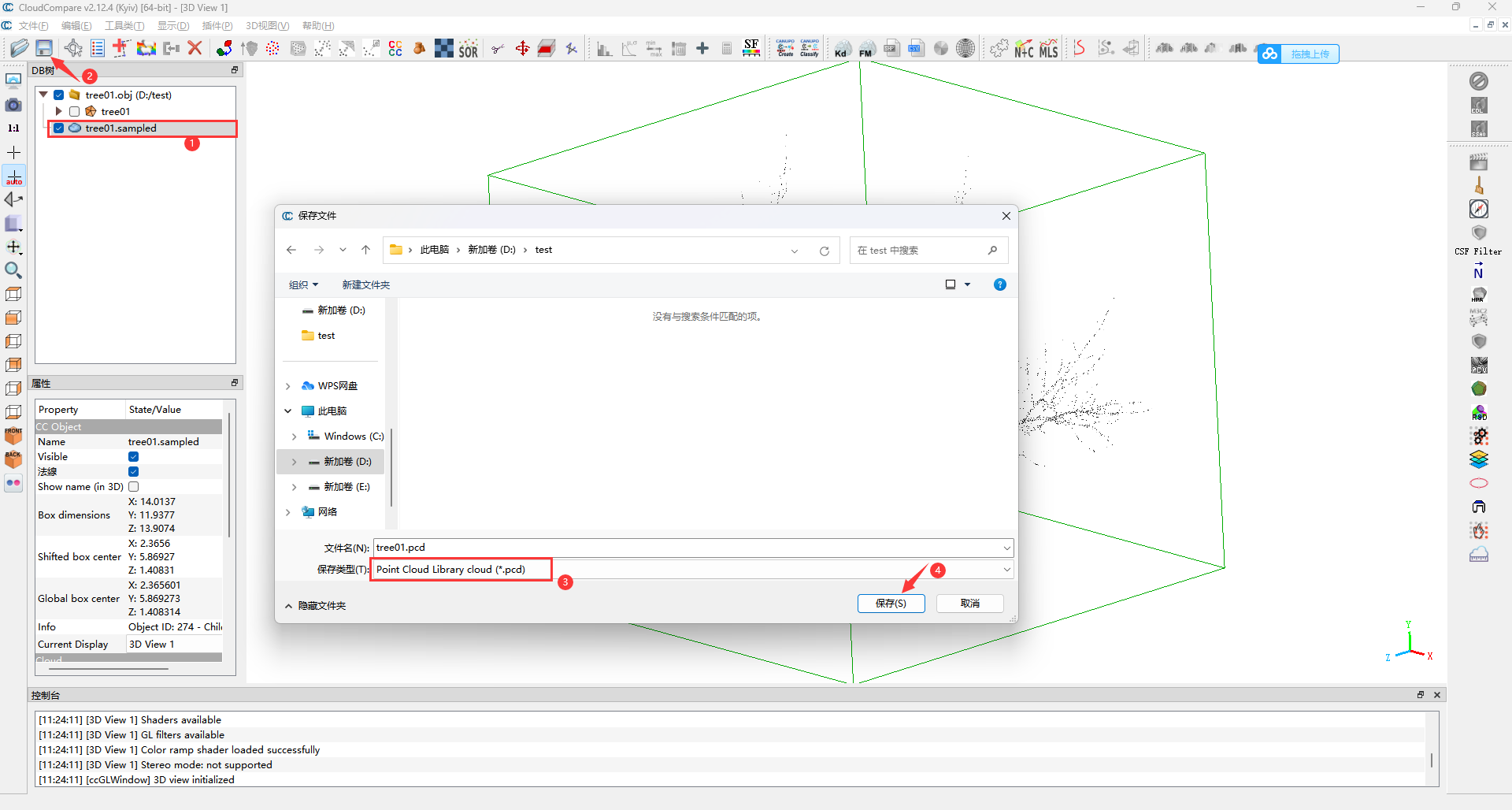
5.选中点云模型,点击保存,文件类型选择点云文件类型(pcd),点击保存。
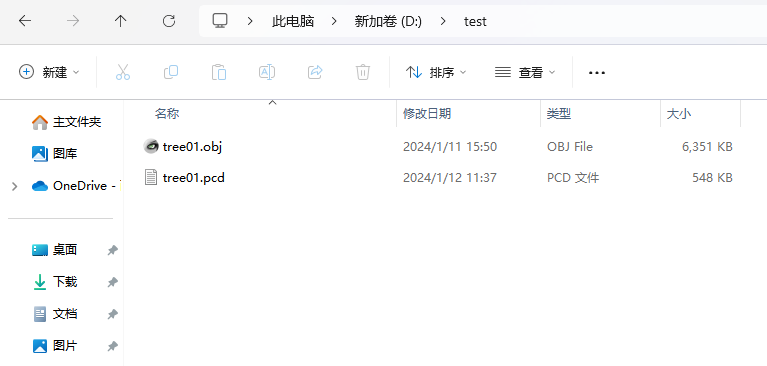
6.在保存的目录下,就能看到点云文件了。
注:生成的点云文件,不能再MeshLab中打开。
后记
如果感觉采样点云过密,可以通过CloudCompare进行滤波处理,可参考下面链接:


















 4885
4885

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











