










18.04下 LOAM_Velodyne 的编译安装(PCL为1.8.1)
1 Ubuntu18.04使用源代码编译安装PCL
1.1 安装依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev //这里如果是1.8改为1.9才可以
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk6.3-qt libvtk6.3 libvtk6-dev
//这里如果不能用需用sudo apt-cache search libvtk 找新版本替换
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
//qt-sdk已无法定位软件
1.2 下载编译
下载pcl包,版本为1.8.1 (只能对应pcl1.8!1.8!1.8!版本使用,版本低了高了都跑不通,1.7/1.9/1.10/1.11都被我踩了一遍,等的每个编译过程老费劲儿了,各种改都不行,最后roslaunch都会报错如下)
 所以,还是乖乖用版本1.8就好,下载链接:
所以,还是乖乖用版本1.8就好,下载链接:
https://github.com/PointCloudLibrary/pcl/releases/tag/pcl-1.8.1
如图,最下面找到 Source code (zip) 点击弹出窗口确定即可手动下载至你的下载目录中,再提取到你需要的地方即可。

编译安装
cd pcl-pcl-1.8.1
mkdir build
cd build
cmake ..
make -j4
//不建议使用cpu的最大线程来编译,可能会死机,用4线程即可大约等20-30 min
sudo make install


2 Loam的编译安装
2.1 下载
cd ~/catkin_ws/src
git clone https://github.com/laboshinl/loam_velodyne.git
下载了就行,不用注释掉任何代码内容。
2.2 编译
cd catkin_ws
catkin_make
报错: CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “pcl_conversions”
with any of the following names:
pcl_conversionsConfig.cmake
pcl_conversions-config.cmake
 解决:
解决:
sudo apt-get install ros-melodic-navigation
sudo apt-get install ros-melodic-pcl-conversions ros-melodic-pcl-ros
此处可尝试直接运行第二步,我直接运行第二步显示无法找到cl-conversions,然后再catkin_make 即可成功。
将其路径写在 ./bashrc 中,如下
2.3 运行
在此链接中下载所需bag
http://wiki.ros.org/loam_velodyne
roslaunch loam_velodyne loam_velodyne.launch
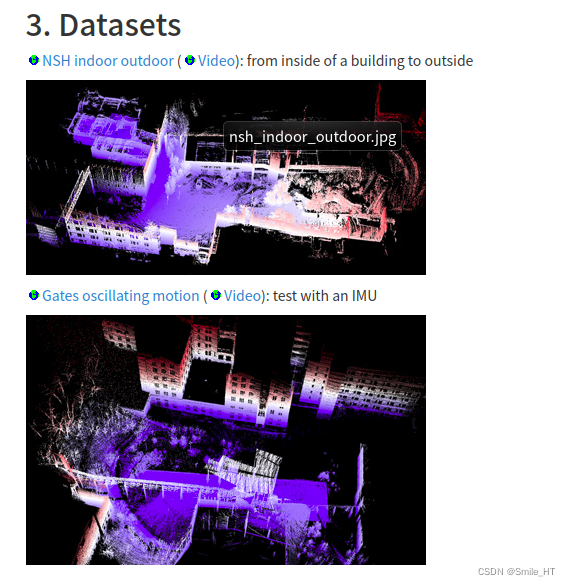
rosbag play nsh_indoor_outdoor.bag
//下面是另一个包跑出的效果
rosbag play gates_oscillating_motion.bag
 运行后会打开rviz并等待雷达数据,播放bag,即可在rviz中看到点云效果
运行后会打开rviz并等待雷达数据,播放bag,即可在rviz中看到点云效果



3 注意
如果还有问题,请操作以下步骤中的一个进行修改:
1.在路径 /home/flycar/catkin_ws/src/loam_velodyne 下打开 CMakeLists.txt
 修改文件中第35行 add_definitions( -march=native ) 前加 # ,注释掉此行,点击保存,返回 2.2 catkin_ws
修改文件中第35行 add_definitions( -march=native ) 前加 # ,注释掉此行,点击保存,返回 2.2 catkin_ws
 2.或者可能是gcc,g++版本过高,降低版本
2.或者可能是gcc,g++版本过高,降低版本
若之前没有则用sudo apt install gcc-5
和sudo apt install g++-5安装
若有则进行如下命令修改
cd /usr/bin
ls -l gcc*
sudo mv gcc gcc.bak
sudo ln -s gcc-5 gcc
gcc --version
sudo mv g++ g++.bak
sudo ln -s g++-5 g++
g++ --version
改回高版本同样用以上命令,修改其中数字5即可。
















 765
765











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











