






无源控制通常是过程控制、远程操作、人机界面和系统网络等应用中安全要求的一部分。如果一个系统不能自行产生能量,并且只能消散最初存储在其中的能量,则它是无源的。更一般地说,如果平均而言,增加输出y需要增加输入u ,则 I/O 映射是无源的。、
例如,PID 控制器是无源的,因为控制信号(输出)与误差信号(输入)的移动方向相同。但是带有延迟的 PID 控制器不是无源的,因为控制信号可以与误差相反的方向移动,这是不稳定的潜在原因。
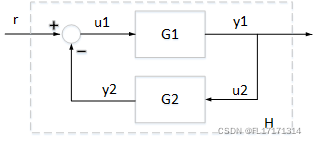
大多数物理系统都是无源的。无源性定理认为,两个严格无源系统的负反馈互连是无源且稳定的。结果,可能需要强制无源系统的控制器的被动性,或者使无源系统的操作者(例如汽车的驾驶员)无源化。
在实践中,无源性很容易被传感器、执行器和通信延迟引入的相位滞后破坏。这些问题导致了无源性定理的扩展,该定理考虑了无源性的过度或不足、无源性的频率相关测量以及无源性和小增益特性的混合。


















 1311
1311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









