







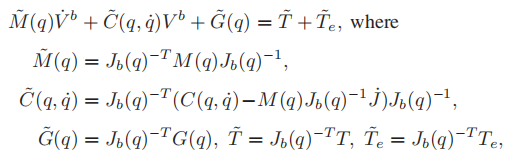
机器人动力学研究力与运动之间的关系,核心目标是建立关节力矩与关节位置、速度、加速度的数学关系。动力学模型通常分为:
-
正向动力学:已知关节力矩,计算末端执行器的运动(加速度)。
-
逆向动力学:已知期望的运动(位置、速度、加速度),计算所需的关节力矩。
![]()
![]()

![]()
function r = mdl_ur5()
deg = pi/180;
% robot length values (metres)
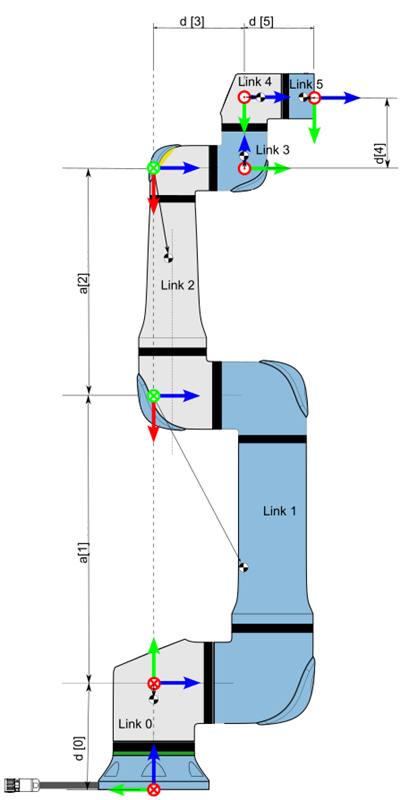
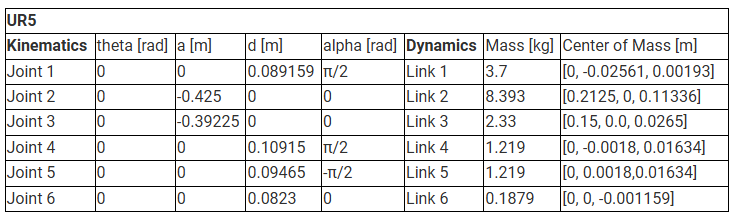
a = [0, -0.42500, -0.39225, 0, 0, 0]';
d = [0.089459, 0, 0, 0.10915, 0.09465, 0.0823]';
alpha = [1.570796327, 0, 0, 1.570796327, -1.570796327, 0]';
theta = zeros(6,1);
DH = [theta d a alpha];
mass = [3.7000, 8.3930, 2.33, 1.2190, 1.2190, 0.1897];
center_of_mass = [
0,-0.02561, 0.00193
0.2125, 0, 0.11336
0.15, 0, 0.0265
0, -0.0018, 0.01634
0, -0.0018, 0.01634
0, 0, -0.001159];
% and build a serial link manipulator
% offsets from the table on page 4, "Mico" angles are the passed joint
% angles. "DH Algo" are the result after adding the joint angle offset.
robot = SerialLink(DH, ...
'name', 'UR5', 'manufacturer', 'Universal Robotics');
% add the mass data, no inertia available
links = robot.links;
for i=1:6
links(i).m = mass(i);
links(i).r = center_of_mass(i,:);
end
links(1).I = diag([0.010267495893,0.010267495893,0.00666]);
links(2).I = diag([0.22689067591,0.22689067591 ,0.0151074]);
links(3).I = diag([0.049443313556,0.049443313556,0.004095]);
links(4).I = diag([0.111172755531,0.111172755531,0.21942]);
links(5).I = diag([0.111172755531,0.111172755531,0.21942]);
links(6).I = diag([0.0171364731454,0.0171364731454,0.033822]);
links(1).Jm = 33e-6;
links(2).Jm = 33e-6;
links(3).Jm = 33e-6;
links(4).Jm = 33e-6;
links(5).Jm = 33e-6;
links(6).Jm = 33e-6;
links(1).qlim = [-180 180]*deg;
links(2).qlim = [-180 180]*deg;
links(3).qlim = [-180 180]*deg;
links(4).qlim = [-180 180]*deg;
links(5).qlim = [-180 180]*deg;
links(6).qlim = [-180 180]*deg;
% place the variables into the global workspace
if nargin == 1
r = robot;
elseif nargin == 0
assignin('caller', 'ur5', robot);
assignin('caller', 'qz', [0 0 0 0 0 0]); % zero angles
assignin('caller', 'qr', [180 0 0 0 90 0]*deg); % vertical pose as per Fig 2
end
end
% 定义 UR5e 各关节的 DH 参数(标准 DH 模型)
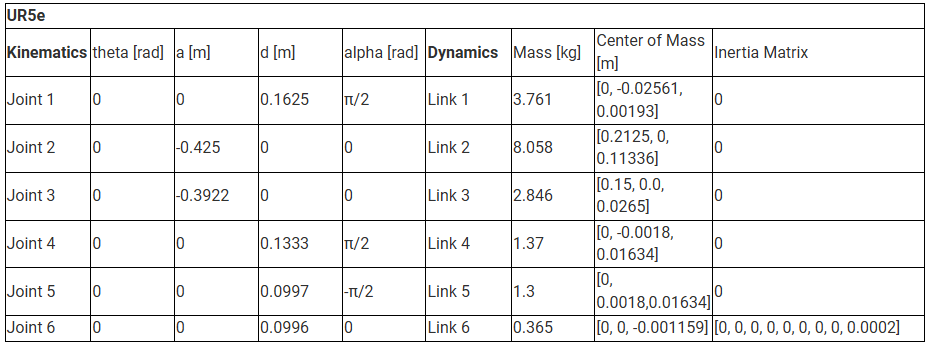
L1 = Link([0 0.1625 0 pi/2], 'standard');
L2 = Link([0 0 -0.425 0], 'standard');
L3 = Link([0 0 -0.3922 0], 'standard');
L4 = Link([0 0.1333 0 pi/2], 'standard');
L5 = Link([0 0.0997 0 -pi/2], 'standard');
L6 = Link([0 0.0996 0 0], 'standard');
% 创建 UR5e 机器人对象
ur5e = SerialLink([L1 L2 L3 L4 L5 L6], 'name', 'UR5e');
% 进入可视化示教模式
ur5e.teach();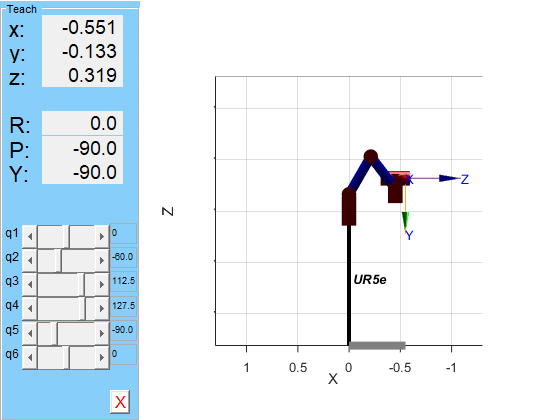
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3828
3828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









