







系统:Ubuntu 20.04
使用 ROS 版本:Ros1 Noetic
需求:IMU 跑 SLAM ,传感器帧率达到100帧
1. 确认自己开启 Roscore,且仿真环境中使用了 Ros Bridge。
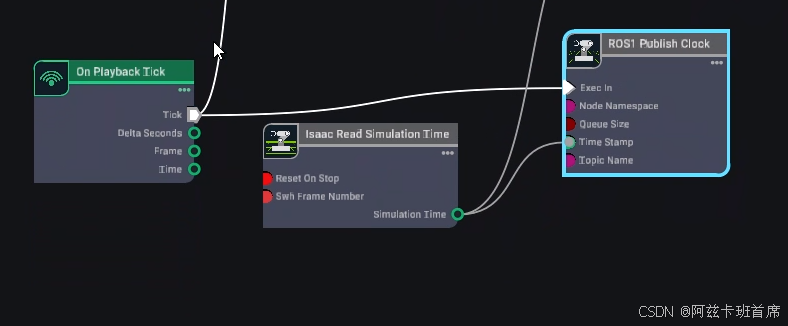
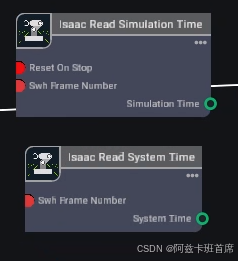
2. 在 Isaac Sim 的 Action Graph 中设置 Clock 如下,主要是这里的 Clock,使用的时间戳只能为 Simulation Time ,不能为 System Time,否则还是低帧率,注意区分。
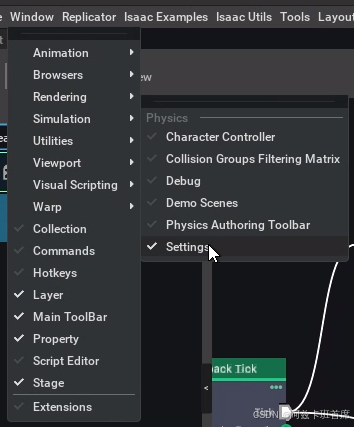
3. 接下来打开 Window - Simulation -Settings
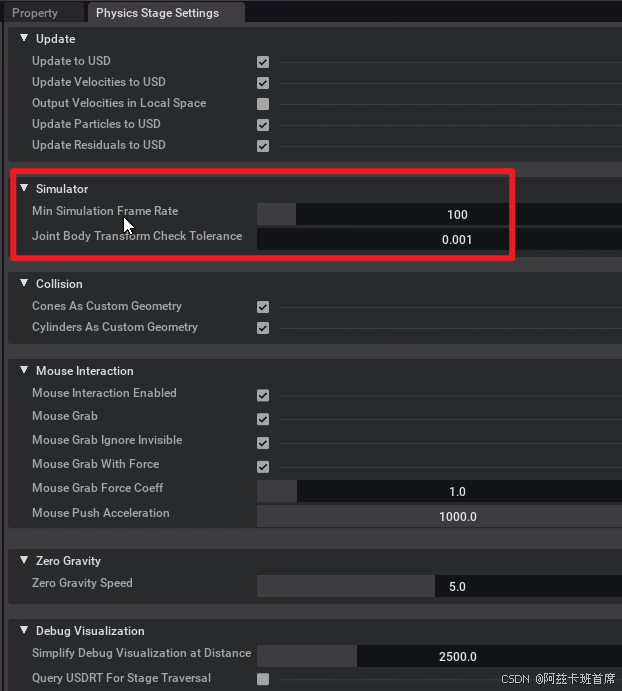
4. 设置最小仿真速率(Min Simulation Frame Rate)为100
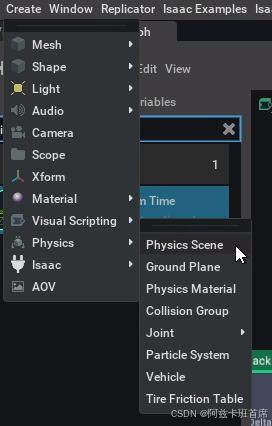
5. 确认自己已有 Physics Scene,如果没有,添加路径:Create - Physics - Physics Scene
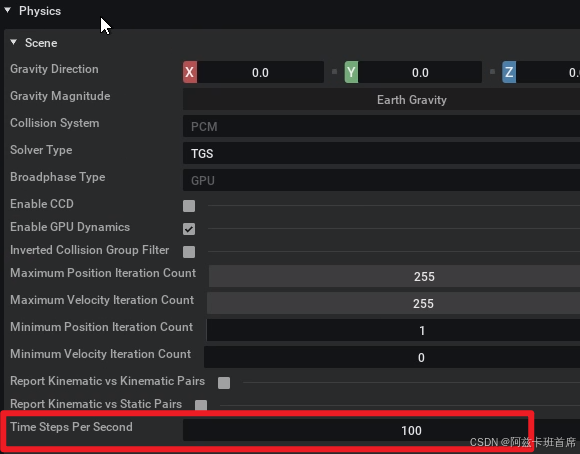
6. 设置 Time Steps Per Second 为目标帧率(这里最大为119FPS,之后会达到 FPS 限制)
7. 在 Roscore 开启的终端路径中:
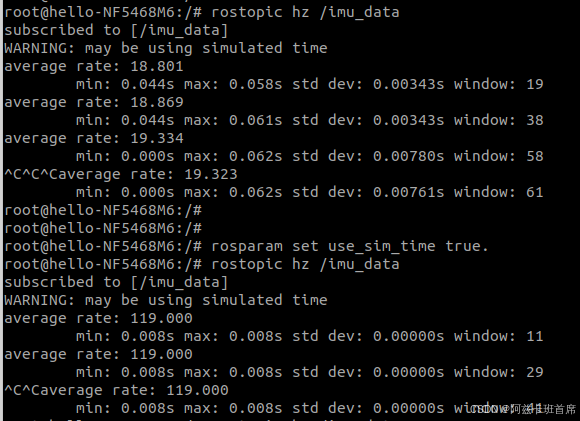
rosparam set use_sim_time true然后再查看 ros 相关话题帧率,可以发现帧率已经提高
这里一开始没使用 rosparam set use_sim_time true 命令,可以看到是18hz,19hz,使用后再查看/imu_data ,可以观察到帧率显著提高

















 215
215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









