






本文以robosense Helios 16和YESENSE YIS510为例,进行雷达采集和IMU数据读取。本系统以ubuntu 20.04版本
1. robosense Helios 16
a. 安装驱动
在github上找到官方的雷达驱动rslidar_sdk: https://github.com/RoboSense-LiDAR/rslidar_sdk
下载驱动文件
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
下载后在download处可以看见文件夹,打开rslidar_sdk文件夹,并且在此目录打开终端,由于包含rs_driver子模块 ,使用 git submodule 下载,运行如下初始代码
git submodule init
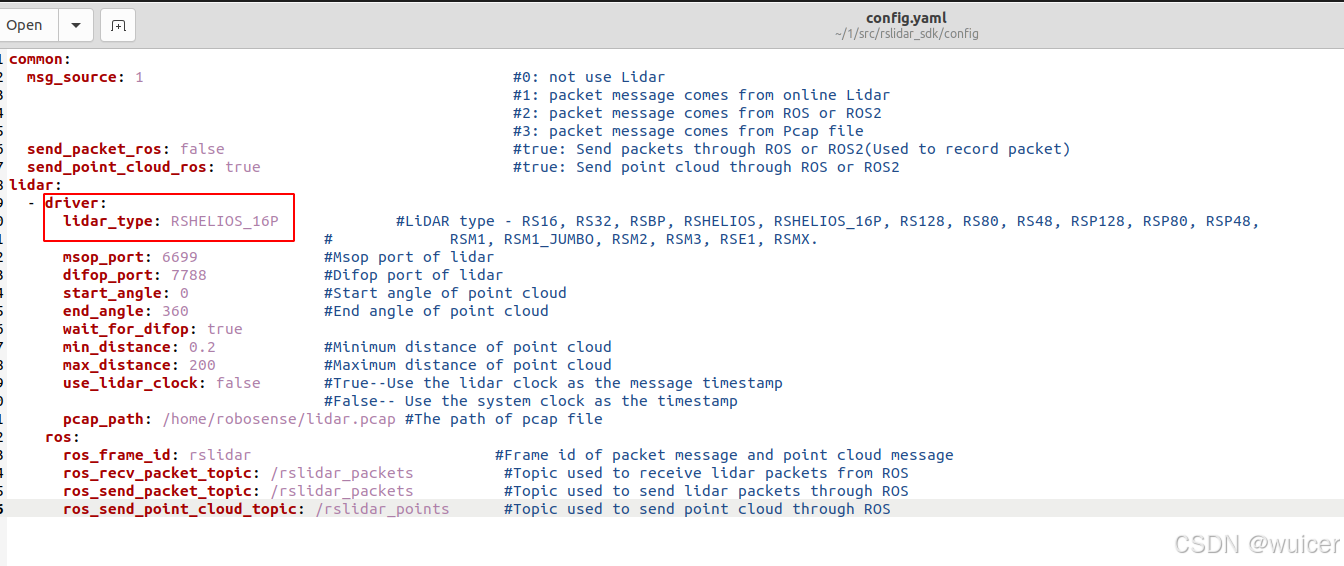
git submodule update依据自身使用的雷达类型,修改rslidar_sdk文件夹中的配置文件夹config中的config.yaml,将lidar_type修改为RSHELIOS_16P,如图
通过如下代码下载驱动的依赖:
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev (distro版本)
sudo apt-get install -y libpcap-dev新建一个文件夹,命名为1,在1文件夹中新建一个文件夹命名为src,将rslidar_sdk文件夹放置进入src文件夹。在src文件夹的路径下,运行终端,输入如下代码进行编译
catkin_make
source devel/setup.bash
roslaunch rslidar_sdk start.launch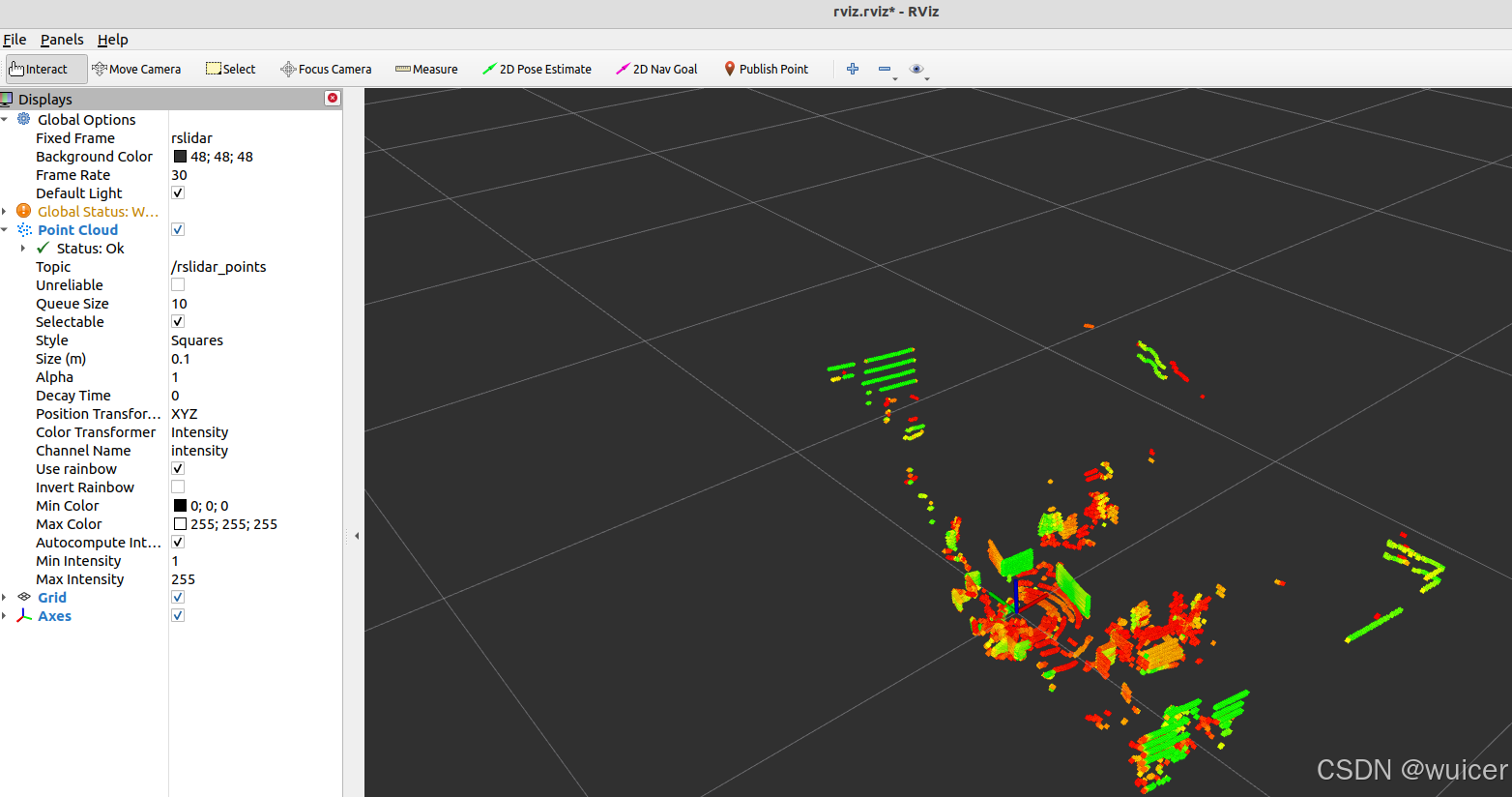
2. YESENSE YIS510
a. 安装驱动
惯导通过USB连接主机,第一步下载驱动文件,通过github官网文件:GitHub - HViktorTsoi/yesense_ros_driver: ROS driver for yesense imu.
git clone https://github.com/HViktorTsoi/yesense_ros_driver.git安装依赖:
sudo apt install ros-noetic-serial-utils ros-noetic-serial
记住自己的ubuntu版本修改代码, 用lsb_release -a 命令查看系统版本,此步骤如果出现报错,serial是一个集成包,请直接下载sudo apt install ros-noetic-serial
文件下载到download本地后,同样新建一个文件夹2,在文件夹2中新建一个文件夹src, 将下载的文件夹yesense_ros_driver放置到文件夹src中,在src文件夹目录下打开终端进行编译:
catkin_make
source devel/setup.bash
roslaunch yesense_imu yesense.launch
如果报错,检查串口设置,执行下列命令:
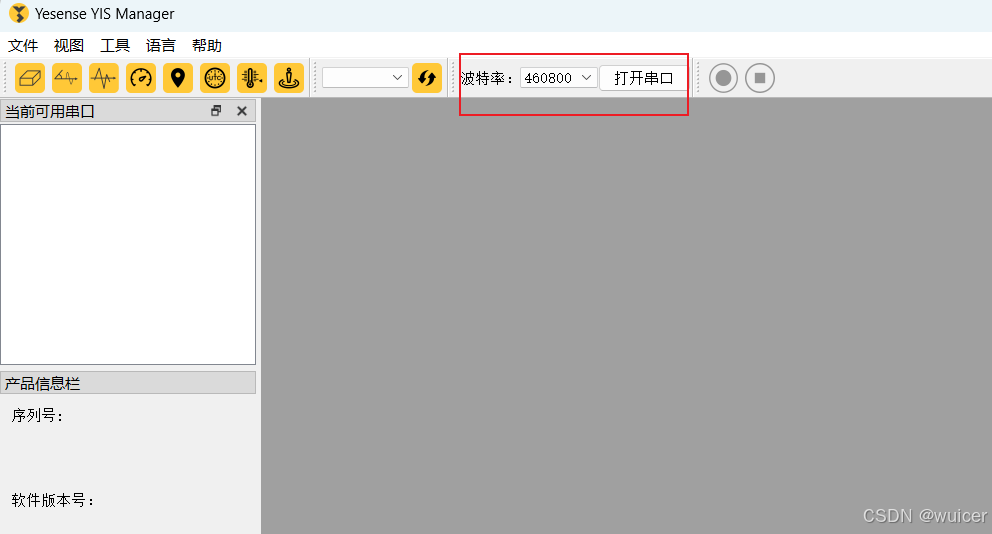
sudo chmod 777 /dev/ttyUSB0惯导的波特率设置过低,可能会导致数据无法完全输出 ,导致配置不成功。这里使用惯导官方配置的上位机连接惯导,修改波特率使其足够大。
修改完毕后在终端输入如下代码rostopic list查看话题确定连接成功
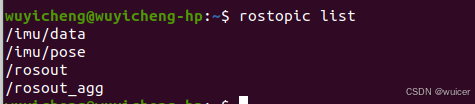
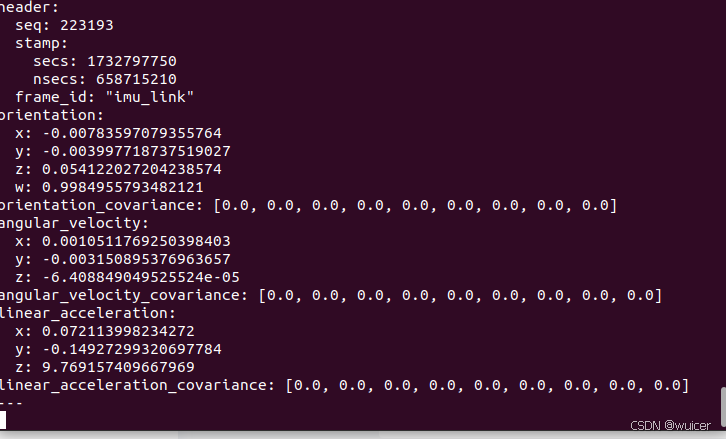
使用命令rostopic echo /imu/data查看惯导数据
3. 安装cloudcompare
1. sudo apt install flatpak
2. flatpak remote-add --if-not-exists flathub https://flathub.org/repo/flathub.flatpakrepo
3. flatpak install flathub org.cloudcompare.CloudCompare4. 录制包
rosbag record -a //录制 -a表示录制了所有节点发布的话题
rosbag record <topic_name1> <topic_name2> <topic_name3> ...
rosbag record -O <bagname> <topic_name1> <topic_name2> <topic_name3> ...


















 2689
2689

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









