







1. 鱼眼相机
鱼眼相机镜头是由十几个不同的透镜组合而成,在成像的过程中,入射光线经过不同程度的折射,投影到尺寸有限的成像平面上,使得鱼眼镜头拥有更大的视野范围。下图为鱼眼相机的组成结构:
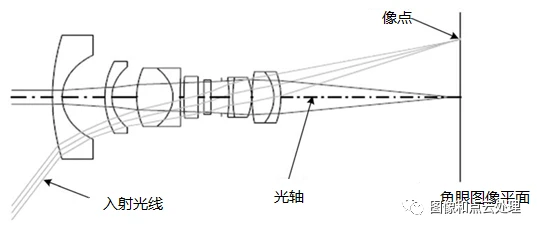
与针孔相机原理不同,鱼眼镜头采用非相似成像,在成像过程中引入畸变,通过对直径空间的压缩,突破成像视角的局限,从而达到广角成像。
鱼眼相机是一种焦距小于等于16mm,且视角接近或者等于180°的极端广角镜头,但是正是因为他极端的短焦和广角,导致它因为光学原理而产生的畸变非常剧烈,所以针孔模型并不能很好的描述鱼眼相机,所以需要一种新的相机模型来对鱼眼相机进行近似模拟。
2. 相机畸变
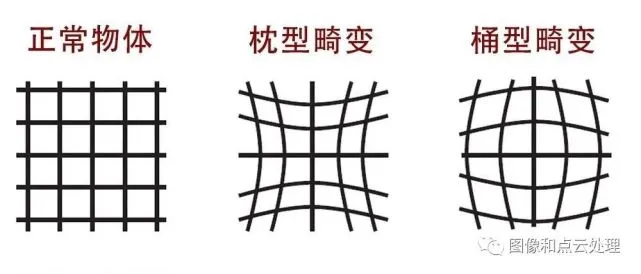
鱼眼镜头无论如何它的边缘线条都是要弯曲的,即使90度的鱼眼也是这样,这种畸变我们在很多广角镜头上都可以看到,而这就是明显的桶形畸变。同样的120度的鱼眼看起来弯曲的更加厉害一些了,而且被容纳进范围的景物更多;150度同样如此,而180度的鱼眼则可以把镜头周围180度范围内的所有物体都拍摄进去。众所周知,焦距越短,视角越大,因光学原理产生的变形也就越强烈。为了达到180度的超大视角,鱼眼镜头不得不允许这种变形(桶形畸变)的合理存在。
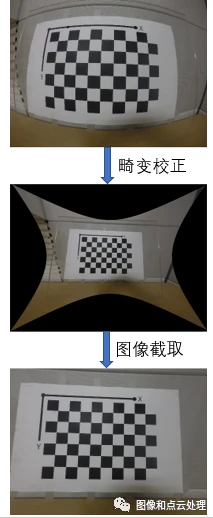
针对原始图像进行畸变校正后,带有冗余边界,需要做进一步截取。如下图:
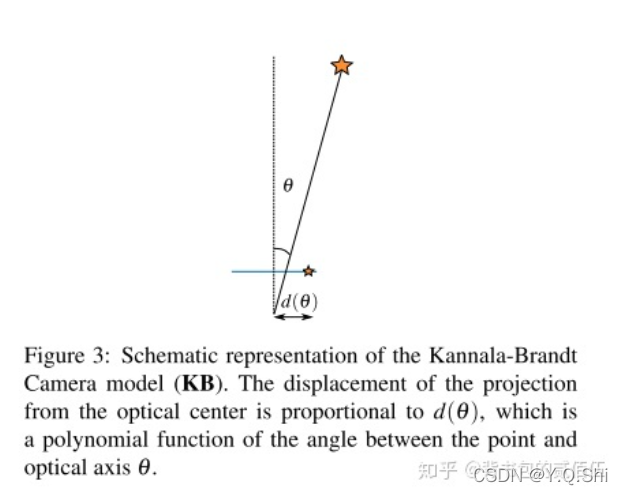
3. KannalaBrandt8模型
KB模型能够很好的适用于普通,广角以及鱼眼镜头。KB模型假设图像光心到投影点的距离和角度的多项式存在比例关系,角度的定义是点所在的投影光纤和主轴之间的夹角。
3.1. 投影过程
其中
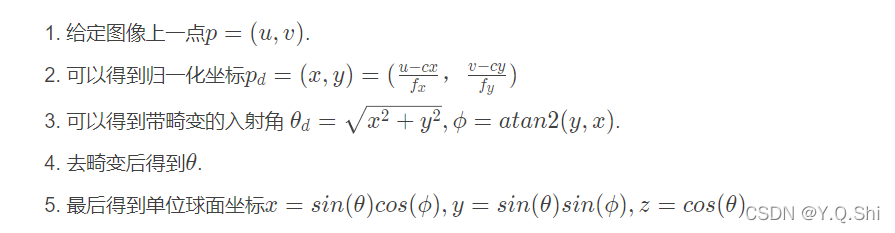
3.2. 反投影过程
4. KannalaBrandt8算法在ORB-SLAM3的实现
4.1. 投影
/**
* @brief 投影
* @param 3D点
* @return 像素坐标
* 注意:ORBSLAM3为投影重载了许多方法以接受各种不同的数据类型,在此就不一一列举了
* 它们只是进行了数据类型之间的转换,然后统一以本方式实现,不再赘述
**/
cv::Point2f KannalaBrandt8::project(const cv::Point3f &p3D)
{
// r^2 = x^2 + y^2
const float x2_plus_y2 = p3D.x * p3D.x + p3D.y * p3D.y;
// θ = atan2(r,z)
const float theta = atan2f(sqrtf(x2_plus_y2), p3D.z);
const float psi = atan2f(p3D.y, p3D.x);
// 计算θ的3,5,7,9次方
// 计算2次方是为了方便计算3,5,7,9次 相当于中间变量
const float theta2 = theta * theta;
const float theta3 = theta * theta2;
const float theta5 = theta3 * theta2;
const float theta7 = theta5 * theta2;
const float theta9 = theta7 * theta2;
// mvParameters是存放相机参数和畸变系数的数组
// [4] [5] [6] [7] 分别代表k1 k2 k3 k4
// 是不是感觉很熟悉 其实KB模型也常被用于针孔的畸变模型
// 计算获得d(θ)
const float r = theta + mvParameters[4] * theta3 + mvParameters[5] * theta5 + mvParameters[6] * theta7 + mvParameters[7] * theta9;
// 注意:注释的r和代码的r不是一个东西 代码r = 注释d(θ) 注释r = 代码x2_plus_y2
// [0] [1] [2] [3] 分别代表 fx fy cx cy
// 利用公式 u = (fx * d(θ) * xc) / r
// v = (fy * d(θ) * yc) / r
// cos(psi) = xc/r sin(psi) = yc/r
return cv::Point2f(mvParameters[0] * r * cos(psi) + mvParameters[2],
mvParameters[1] * r * sin(psi) + mvParameters[3]);
}
4.2. 反投影
/**
* @brief 反投影过程
* @param 像素坐标
* @return 归一化坐标
**/
cv::Point3f KannalaBrandt8::unproject(const cv::Point2f &p2D)
{
//Use Newton method to solve for theta with good precision (err ~ e-6)
// 使用Newton法来求解θ,获得了很好的效果
// 获取归一化的x,y坐标
// x = (u - cx) / fx
// y = (v - cy) / fy
cv::Point2f pw((p2D.x - mvParameters[2]) / mvParameters[0], (p2D.y - mvParameters[3]) / mvParameters[1]); // xd yd
// 设置尺度为1
float scale = 1.f;
// xd = θd/r * xc yd = θd/r * yc
// xd^2 + yd^2 = (θd^2 / r^2) * (xc^2 + yc^2)
// xc^2 + yc^2 = r^2
// θ = (xd^2 + yd^2)^(1/2)
float theta_d = sqrtf(pw.x * pw.x + pw.y * pw.y); // sin(psi) = yc / r
//确保θd在[-π,π]的范围内
theta_d = fminf(fmaxf(-CV_PI / 2.f, theta_d), CV_PI / 2.f); // 不能超过180度
// 已知θd 求解 θ
if (theta_d > 1e-8)
{
//Compensate distortion iteratively
float theta = theta_d; // θ的初始值定为了θd
// 开始迭代
for (int j = 0; j < 10; j++)
{
float theta2 = theta * theta,
theta4 = theta2 * theta2,
theta6 = theta4 * theta2,
theta8 = theta4 * theta4;
float k0_theta2 = mvParameters[4] * theta2,
k1_theta4 = mvParameters[5] * theta4;
float k2_theta6 = mvParameters[6] * theta6,
k3_theta8 = mvParameters[7] * theta8;
// f(θ) = θ + k1 * θ^3 + k2 * θ^5 + k3 * θ^7 + k4 * θ^9
// e(θ) = f(θ) - θd
// 直接求解θ很难 所以通过求导优化的方法
// 目标是优化获得e(θ) = 0对应的θ
// e(θ)' = 1 + 3 * k1 * θ^2 + 5 * k2 * θ^4 + 7 * k3 * θ^6 + 9 * k4 * θ^8
// δ(θ) = e(θ) / e(θ)' 修正量
float theta_fix = (theta * (1 + k0_theta2 + k1_theta4 + k2_theta6 + k3_theta8) - theta_d) /
(1 + 3 * k0_theta2 + 5 * k1_theta4 + 7 * k2_theta6 + 9 * k3_theta8);
// 进行修正
theta = theta - theta_fix;
// 如果更新量变得很小,表示接近最终值
if (fabsf(theta_fix) < precision)
break;
}
//scale = theta - theta_d;
// 求得tan(θ) / θd
scale = std::tan(theta) / theta_d;
}
// 获取归一化坐标
return cv::Point3f(pw.x * scale, pw.y * scale, 1.f);
}
4.3. 求解雅各比矩阵
/**
* @breif 求解像素坐标关于三维点的雅各比矩阵
* @param p3D 三维点
* @return 雅各比矩阵[一个两行三列的矩阵]
**/
cv::Mat KannalaBrandt8::projectJac(const cv::Point3f &p3D)
{
float x2 = p3D.x * p3D.x, y2 = p3D.y * p3D.y, z2 = p3D.z * p3D.z;
float r2 = x2 + y2;
float r = sqrt(r2);
float r3 = r2 * r;
float theta = atan2(r, p3D.z);
float theta2 = theta * theta, theta3 = theta2 * theta;
float theta4 = theta2 * theta2, theta5 = theta4 * theta;
float theta6 = theta2 * theta4, theta7 = theta6 * theta;
float theta8 = theta4 * theta4, theta9 = theta8 * theta;
float f = theta + theta3 * mvParameters[4] + theta5 * mvParameters[5] + theta7 * mvParameters[6] +
theta9 * mvParameters[7];
float fd = 1 + 3 * mvParameters[4] * theta2 + 5 * mvParameters[5] * theta4 + 7 * mvParameters[6] * theta6 +
9 * mvParameters[7] * theta8;
// u = (fx * θd * x) / r + cx
// v = (fy * θd * y) / r + cy
// θd = θ + k1 * θ^3 + k2 * θ^5 + k3 * θ^7 + k4 * θ^9
// θ = arctan(r,z)
// r = (x^2 + y^2)^(1/2)
cv::Mat Jac(2, 3, CV_32F);
Jac.at<float>(0, 0) = mvParameters[0] * (fd * p3D.z * x2 / (r2 * (r2 + z2)) + f * y2 / r3); // ∂u/∂x
Jac.at<float>(1, 0) =
mvParameters[1] * (fd * p3D.z * p3D.y * p3D.x / (r2 * (r2 + z2)) - f * p3D.y * p3D.x / r3); // ∂v/∂x
Jac.at<float>(0, 1) =
mvParameters[0] * (fd * p3D.z * p3D.y * p3D.x / (r2 * (r2 + z2)) - f * p3D.y * p3D.x / r3); // ∂u/∂y
Jac.at<float>(1, 1) = mvParameters[1] * (fd * p3D.z * y2 / (r2 * (r2 + z2)) + f * x2 / r3); // ∂v/∂y
Jac.at<float>(0, 2) = -mvParameters[0] * fd * p3D.x / (r2 + z2); // ∂u/∂z
Jac.at<float>(1, 2) = -mvParameters[1] * fd * p3D.y / (r2 + z2); // ∂v/∂z
std::cout << "CV JAC: " << Jac << std::endl;
return Jac.clone();
}
















 1668
1668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









