






 本文探讨了闭环系统中PD控制器参数的确定方法,重点介绍了如何通过自然频率和阻尼比来设定控制器参数Kd和Kp,以实现临界阻尼的最快非震荡响应。并举例说明了不同自然频率下PD控制器参数的变化及其对阶跃响应和扰动稳态误差的影响。
本文探讨了闭环系统中PD控制器参数的确定方法,重点介绍了如何通过自然频率和阻尼比来设定控制器参数Kd和Kp,以实现临界阻尼的最快非震荡响应。并举例说明了不同自然频率下PD控制器参数的变化及其对阶跃响应和扰动稳态误差的影响。
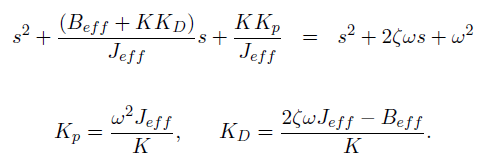
上节所讲到的闭环系统的PD控制器是二阶的,因此阶跃响应由自然频率和阻尼比来确定。如果给定自然频率和阻尼比的值,那么控制器参数Kd和Kp就可以通过下面的式子来确定:
一般把阻尼比设置为1,这样的话响应就是临界阻尼,这就提供了最快的非震荡响应。在本书中自然频率ω决定了响应速度。
例10.1 考虑如下二阶系统
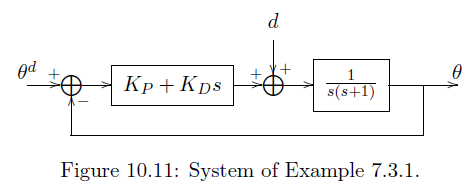
该系统的闭环特征多项式为

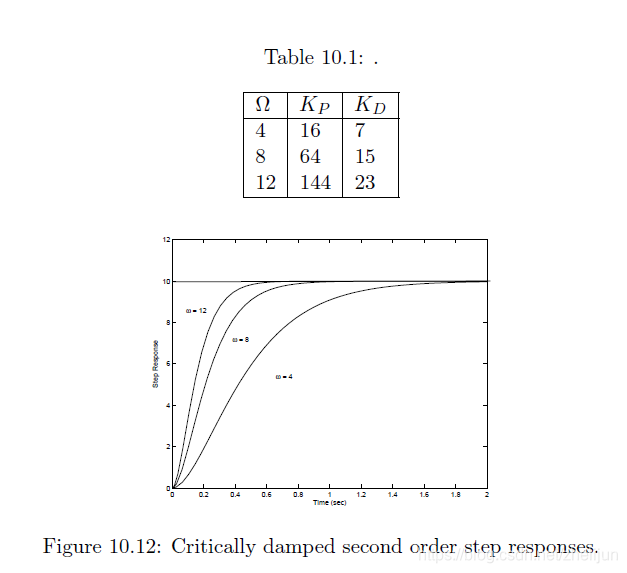
假设输入=10,且没有扰动(d=0).如果ζ=1,那么对于不同的ω系统所需要的PD控制器参数以及对应的阶跃响应如下所示
如果加上d=40的扰动,响应结果如下
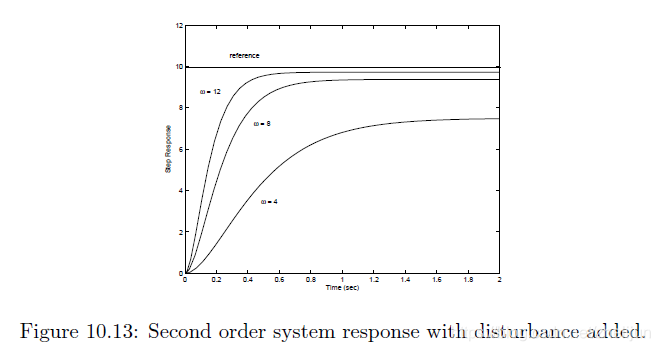
我们发现:自然频率越大,由于扰动产生的稳态误差越小
《机器人动力学与控制》第十章——独立关节控制 10.3.2 PD 控制器的性能
最新推荐文章于 2023-01-16 23:58:12 发布


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









