






 本文档详细介绍了ROS_Kinetic版本的基础设置流程,包括环境变量配置、工作空间创建、文件系统导航及功能包的创建与编译。适用于ROS初学者。
本文档详细介绍了ROS_Kinetic版本的基础设置流程,包括环境变量配置、工作空间创建、文件系统导航及功能包的创建与编译。适用于ROS初学者。
ROS_Kinetic_04 ROS基础内容(一)
在开始基础内容之前,假定您已经完成了ROS kinetic版本的安装,
如果没有请参考ROS kinetic安装说明。
1. 环境变量
在使用ROS期间,一定要确保环境变量配置正确,通常是source不同的setup.bash。
~$ source /opt/ros/kinetic/setup.bash
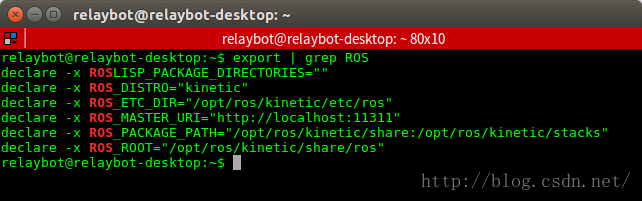
如果您在查找和使用ROS功能表遇到问题,请检查您的脚本环境,可以使用以下命令:
~$ export | grep ROS
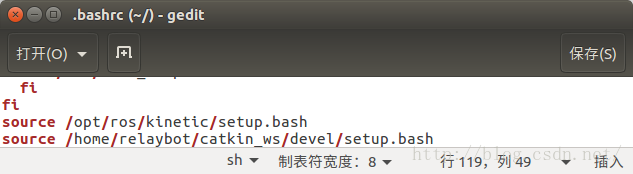
为了避免在每次启动终端都输入ROS相关环境配置命令,可以将其添加到.bashrc文件中。
2. 创建ROS工作空间(catkin)
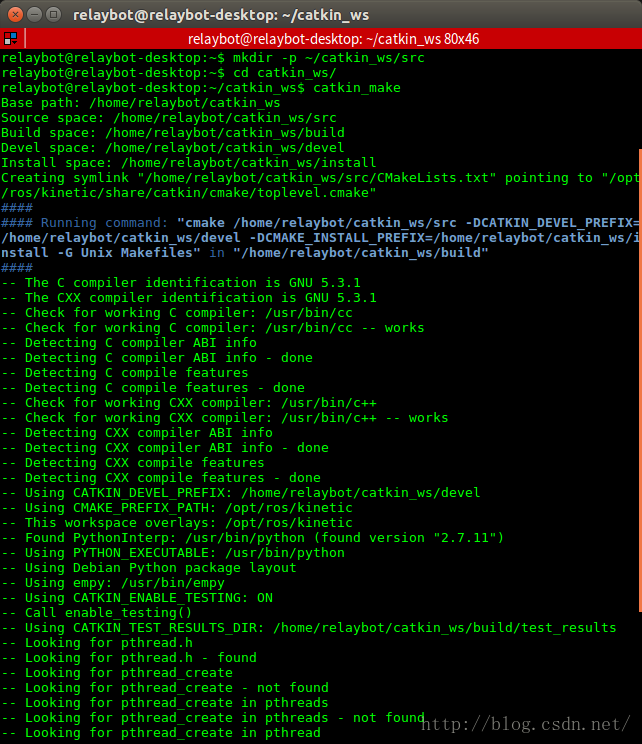
输入下面命令创建一个新的catkin工作空间:
~$ mkdir -p ~/catkin_ws/src
~$ cd catkin_ws/
~/catkin_ws$ catkin_make
完成后,输入下面命令:
~/catkin_ws$ source devel/setup.bash
使用下面命令查看环境变量:
~/catkin_ws$ echo $ROS_PACKAGE_PATH

为了避免在每次启动终端都需要配置环境变量,修改.bashrc:
3. ROS文件系统
首先确保教程包已经安装:
~$ sudo apt-get install ros-kinetic-ros-tutorials
Packages:功能包-包含程序,可执行文件,脚本等;
Manifest:清单-包含依赖关系,版本信息等。
文件系统工具:
使用rospack获取功能包的相关信息。
~$ rospack find turtlesim

使用roscd直接前进到功能包目录中:
~$ roscd turtlesim

$ pwd
rosls
~$ rosls turtlesim

Tab补全小技巧。----rospack roscd rosls----
4. 创建ROS功能包
先提供官网中文教程:http://wiki.ros.org/cn/ROS/Tutorials/CreatingPackage
列一些重要的命令:
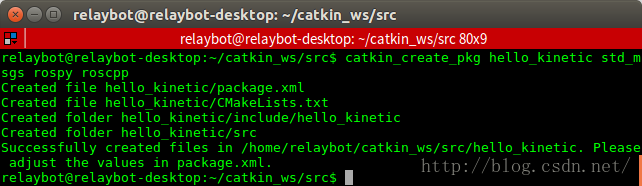
~$ cd catkin_ws/src/
~/catkin_ws/src$ catkin_create_pkg hello_kinetic std_msgs rospy roscpp
~/catkin_ws/src$ rospack depends hello_kinetic
~/catkin_ws/src$ rospack depends1 hello_kinetic
5. 编译ROS功能包
先提供官网中文教程:http://wiki.ros.org/cn/ROS/Tutorials/BuildingPackages
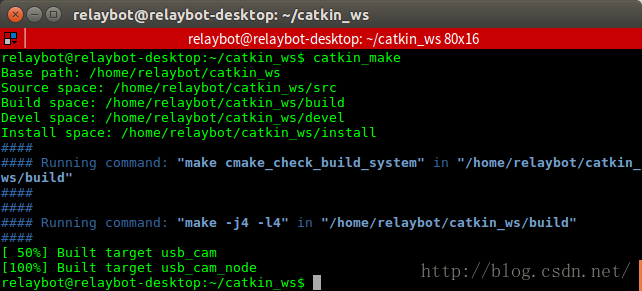
~/catkin_ws$ catkin_make
~/catkin_ws$ catkin_make install
如果源代码不再src文件夹使用下面命令:
~/catkin_ws$ catkin_make --source xxxx
当功能包编译完成,就可以使用了。
这里以usb_cam为例,下载地址:https://github.com/bosch-ros-pkg/usb_cam
~/catkin_ws$ catkin_make
~/catkin_ws$ rosstack profile & rospack profile
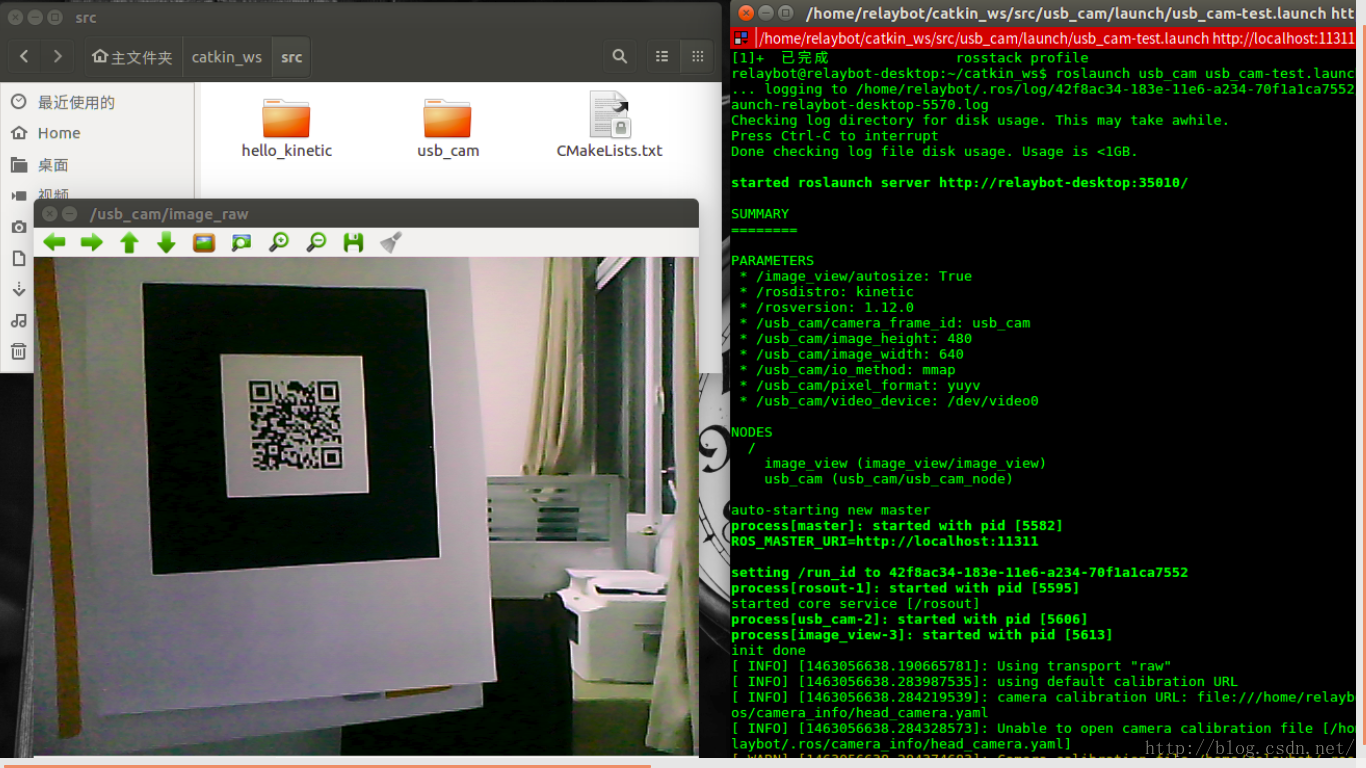
~/catkin_ws$ roslaunch usb_cam usb_cam-test.launch
-End-


















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言









