







查看Eigen版本
$ head -n 20 /usr/include/eigen3/Eigen/src/Core/util/Macros.h#define EIGEN_WORLD_VERSION 3
#define EIGEN_MAJOR_VERSION 2
#define EIGEN_MINOR_VERSION 92版本就是3.2.92
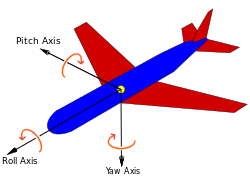
搞清旋转关系
eigen_test.cc:
#include <cmath>
#include <iostream>
#include <Eigen/Eigen>
// wrap the angle within [-PI, PI)
double WrapToPI(double ang_in_rad) {
int c = ang_in_rad / (2.0 * M_PI);
ang_in_rad -= c * (2.0 * M_PI);
if (ang_in_rad < -M_PI) {
ang_in_rad += 2.0 * M_PI;
}
if (ang_in_rad >= M_PI) {
ang_in_rad -= 2.0 * M_PI;
}
return ang_in_rad;
}
int main(int argc, char *argv[]) {
double roll = 30;
double pitch = 45;
double yaw = 90;
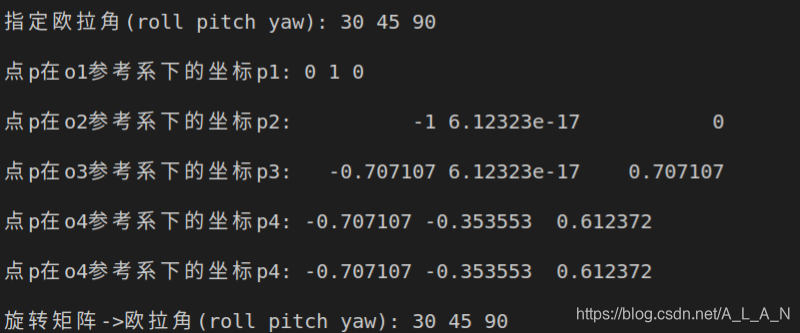
std::cout << "\n指定欧拉角(roll pitch yaw): " << roll << " " << pitch << " " << yaw << std::endl;
Eigen::Vector3d p1(0, 1, 0); // 点p在o1参考系下的坐标为(0, 1, 0)
std::cout << "\n点p在o1参考系下的坐标p1: " << p1.transpose() << std::endl;
Eigen::AngleAxisd v_21(yaw * M_PI / 180, Eigen::Vector3d::UnitZ()); // o1参考系绕其z轴(转yaw)顺时针旋转90度得到o2参考系
Eigen::Matrix3d R_21 = v_21.matrix();
Eigen::Vector3d p2 = R_21 * p1; // 点p在o2参考系下的坐标为(-1, 0, 0)
std::cout << "\n点p在o2参考系下的坐标p2: " << p2.transpose() << std::endl;
Eigen::AngleAxisd v_32(pitch * M_PI / 180, Eigen::Vector3d::UnitY()); // o2参考系绕其y轴(pitch)顺时针旋转45度得到o3参考系
Eigen::Matrix3d R_32 = v_32.matrix();
Eigen::Vector3d p3 = R_32 * p2; // 点p在o3参考系下的坐标为(-0.707, 0, 0.707)
std::cout << "\n点p在o3参考系下的坐标p3: " << p3.transpose() << std::endl;
Eigen::AngleAxisd v_43(roll * M_PI / 180, Eigen::Vector3d::UnitX()); // o3参考系绕其x轴(roll)顺时针旋转30度得到o4参考系
Eigen::Matrix3d R_43 = v_43.matrix();
Eigen::Vector3d p4 = R_43 * p3; // 点p在o4参考系下的坐标为(-0.707, -0.35, 0.61)
std::cout << "\n点p在o4参考系下的坐标p4: " << p4.transpose() << std::endl;
Eigen::Matrix3d R_41 = R_43 * R_32 * R_21; // 先绕z轴顺时针旋转90度,再绕y轴顺时针旋转45度,最后绕x轴顺时针旋转30度
// Eigen::Matrix3d R_41 = v_43 * v_32 * v_21;
p4 = R_41 * p1; // 点p在o4参考系下的坐标为(-0.707, -0.353, 0.612)
std::cout << "\n点p在o4参考系下的坐标p4: " << p4.transpose() << std::endl;
// 旋转矩阵->欧拉角
Eigen::Vector3d euler_angles = R_41.eulerAngles(0, 1, 2); // (0,1,2) 表示分别绕XYZ轴顺序(与上面旋转顺序相反),即按roll,pitch,yaw顺序,顺时针为正
// Euler's angles are not unique.
// eigen has two sets of euler angles: (a, b, c) or (pi+a, pi-b, pi+c)
// In your XYZ convention, both (0, pi, pi) and (pi, 0, 0) represents the same rotation, and both are correct.
// The Eigen::eulerAngles method consistently chooses to minimize first angles.
if (std::fabs(euler_angles(1)) > M_PI / 2) {
euler_angles(0) = WrapToPI(M_PI + euler_angles(0));
euler_angles(1) = WrapToPI(M_PI - euler_angles(1));
euler_angles(2) = WrapToPI(M_PI + euler_angles(2));
}
std::cout << "\n旋转矩阵->欧拉角(roll pitch yaw): " << euler_angles.transpose() * 180 / M_PI << std::endl; // 30 45 90
return 0;
}输出:
不同旋转表示及相互转换
eigen_test.cc:
eigen变量如果不初始化,值难以预测!!!
#include <cmath>
#include <iostream>
#include <Eigen/Eigen>
int main(int argc, char *argv[]) {
// 单位四元素
Eigen::Quaterniond q = Eigen::Quaterniond(1, 0, 0, 0); // (w,x,y,z)
// Eigen::Quaterniond q(1, 0, 0, 0); // (w,x,y,z)
// Eigen::Quaterniond q(Eigen::Vector4d(0, 0, 0, 1)); // (x,y,z,w)
std::cout << "\n单位四元素:\n" << q.coeffs() << std::endl; // (x,y,z,w)
// 单位旋转矩阵
Eigen::Matrix3d rotation_matrix3d = Eigen::Matrix3d::Identity();
std::cout << "\n单位旋转矩阵:\n" << rotation_matrix3d << std::endl;
// 旋转向量(轴角)
Eigen::AngleAxisd angle_axis(M_PI / 4, Eigen::Vector3d(0, 0, 1)); // 绕z轴顺时针旋转45°(yaw)
std::cout << "\n旋转向量:\naxi: " << angle_axis.axis().transpose() << ", angle: " << angle_axis.angle() * 180 / M_PI << std::endl;
// 欧拉角
Eigen::Vector3d euler_angles(0, 0, 45); // roll pitch yaw(自定义)
std::cout << "\n欧拉角:\n(roll pitch yaw) = " << euler_angles.transpose() << std::endl;
// 旋转向量->旋转矩阵
rotation_matrix3d = angle_axis.matrix();
// rotation_matrix3d = angle_axis.toRotationMatrix();
std::cout << "\n旋转向量->旋转矩阵:\n" << rotation_matrix3d & 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 549
549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









