









这是关于LMPC非常好的资料:
Learning MPC (LMPC): Learning Safe Set and Cost to Go
This set of of papers shows repetitively learning cost-to go and safe invariant sets for systems with known models.
Publications:
GitHub repositories:
Video of experimental tests
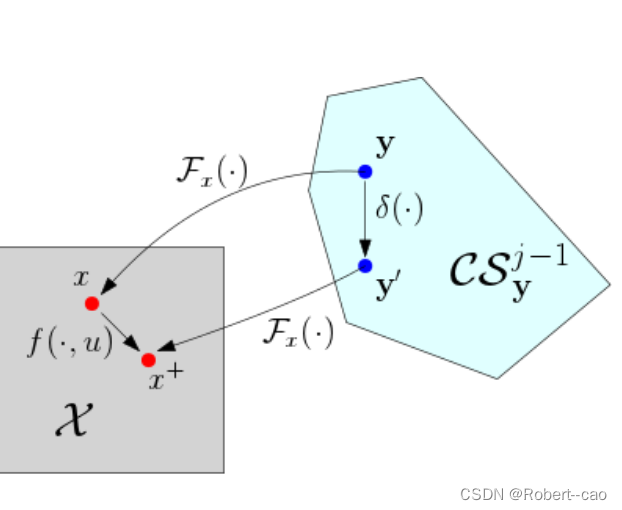
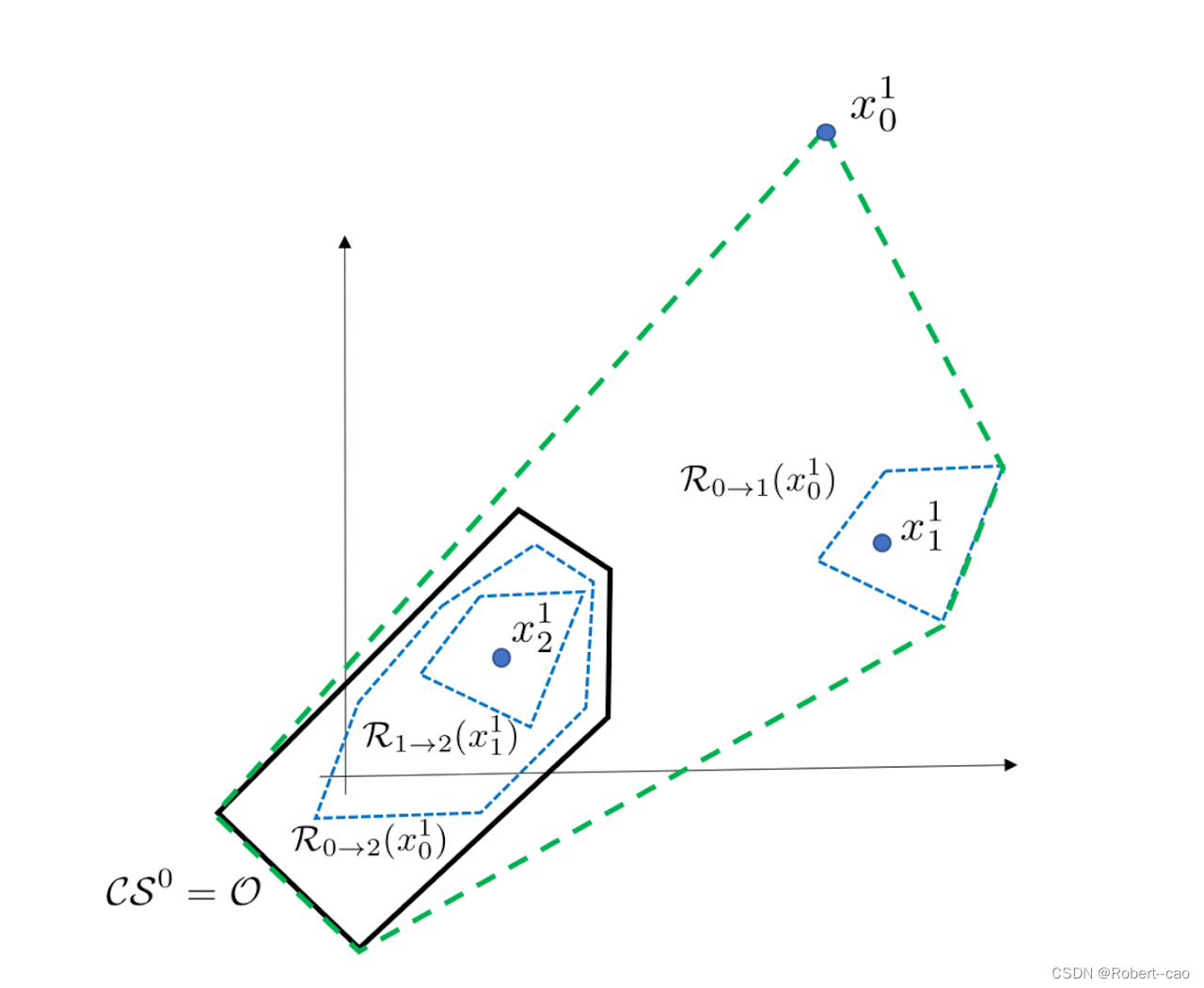
Efficient LMPC: Learning Convex Safe Sets for Known Nonlinear Systems
This set of of papers shows a computationally efficient extension of LMPC for nonlinear systems with known models.
Publications:
Robust LMPC: Learning Cost to Go and Safe Set under Disturbance
This set of of papers shows extension of LMPC to systems under a model disturbance. The support/PDF of disturbance is known.
Publications:
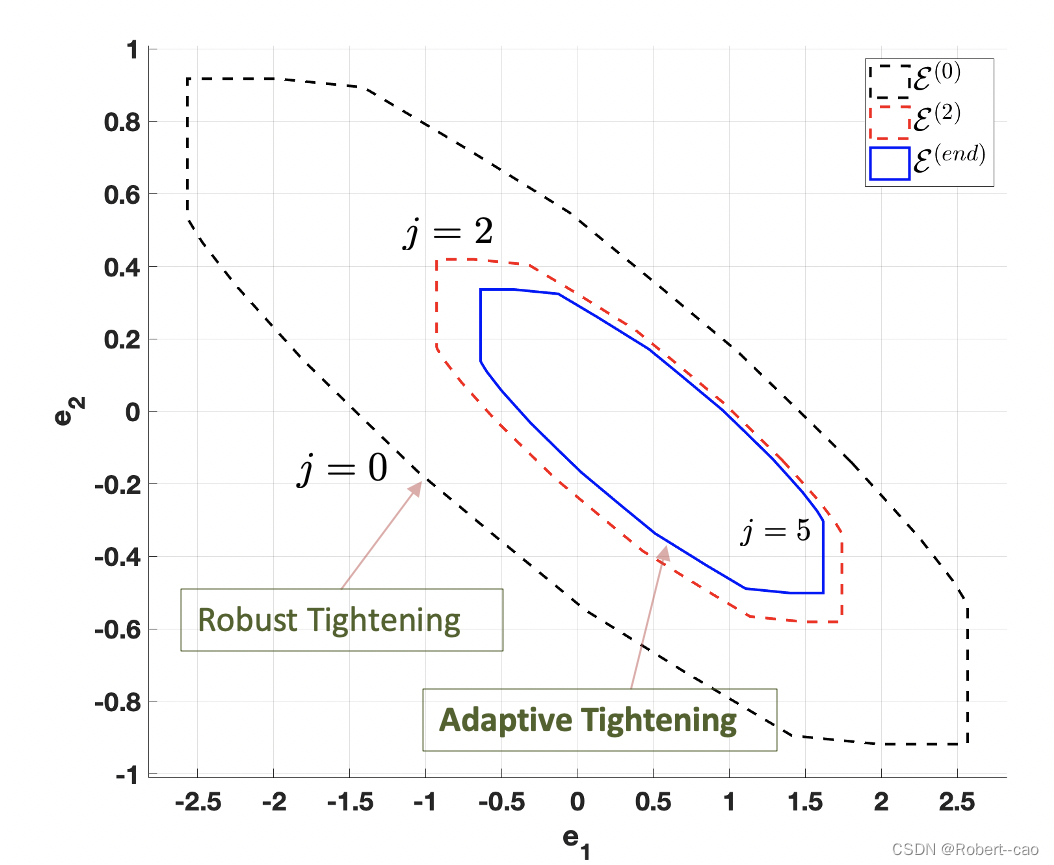
Learning Model Uncertainty with Guaranteed Safety
This set of of papers shows learning of uncertain model parameters in robust/stochastic MPC. Disturbance supports are known
Publications:
Learning Disturbance Support While Allowing Failure
This set of of papers shows learning of unknown disturbance supports with known confidence. Safety during learning is ensured with a guaranteed probability.
Publications:
GitHub repositories:
-
coming soon
Video of experimental tests
Learning Environment Safety Constraints While Allowing Failure
This set of of papers shows learning of unknown safety constraints. True constraint satisfaction is ensured with a guaranteed probability
Publications:
Learning a Policy for Different Environments
This set of papers shows the development of data-driven control policies for solving tasks in unknown environments, while being able to guarantee constraint satisfaction before beginning the task.
Publications:
GitHub repositories:
-
Strategy-Guided Control GitHub - MATLAB, Python & ROS
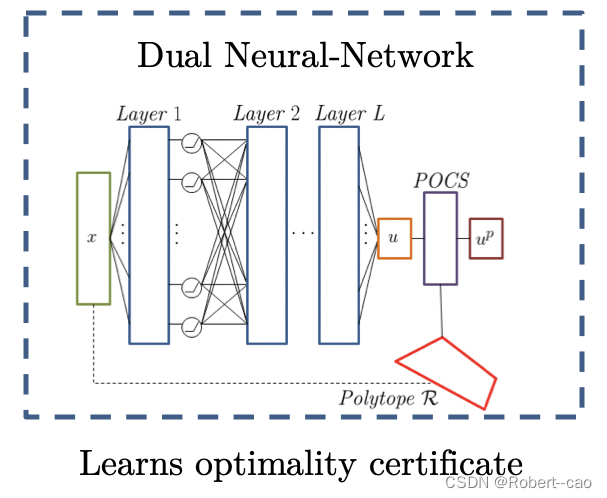
Learning a Policy for Fast Online MPC
This set of of papers shows fast implementation of explicit MPC using neural networks with online suboptimality check.
Publications:
GitHub repositories:

















 738
738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









