






目录
1.控制器基本结构
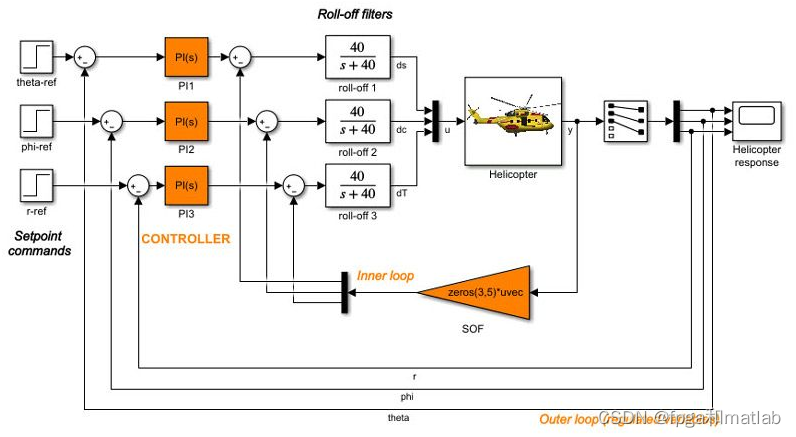
根据本章节8个课程的学习,我们基本掌握了控制器的simulink建模方法,其基本建模基本符合如下的建模结构:
由上图可知,控制器的仿真建模包括:
1.参考输入
2.控制算法:控制算法包括PID,MPC,自适应PID,滑膜等控制算法。
3.控制对象:一般情况下可

 本文总结了基于Simulink的控制器设计,包括控制器基本结构、模块封装、数据导入、MATLAB与Simulink数据传递、控制器模块应用、MATLAB Function模块的使用、限幅模块Saturation的运用以及在模型上贴图的方法。通过实例介绍了PID、模糊、MPC、自适应PID、滑模和LQR控制器的设计与实现。
本文总结了基于Simulink的控制器设计,包括控制器基本结构、模块封装、数据导入、MATLAB与Simulink数据传递、控制器模块应用、MATLAB Function模块的使用、限幅模块Saturation的运用以及在模型上贴图的方法。通过实例介绍了PID、模糊、MPC、自适应PID、滑模和LQR控制器的设计与实现。
目录
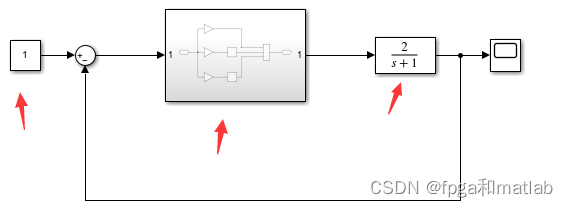
根据本章节8个课程的学习,我们基本掌握了控制器的simulink建模方法,其基本建模基本符合如下的建模结构:
由上图可知,控制器的仿真建模包括:
1.参考输入
2.控制算法:控制算法包括PID,MPC,自适应PID,滑膜等控制算法。
3.控制对象:一般情况下可
 516
813
832
516
813
832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























