






fast-lio2主要算法为迭代误差卡尔曼滤波算法,imu作为预测,点云更新,当点云发散时输出位姿异常,漂移很大,后端在融合出现崩溃情况,加入轮速计约束发散时位姿。
1.订阅wheel话题
2.发散检测,检测到发散将点云协方差设置最大。
3.打滑检测,打滑的时候,限制轮速计的协方差。
4.收敛时,增加轮子的协方差,轮子的观测值误差较大会影响融合结果。
fast-lio2中状态量为pos rot offsetR offsetT vel bg ba g,速度的观测量为x方向,imu坐标系为右前上,将轮速计转化到imu坐标系为y方向,后轮驱动,imu在前方为,Imu的实际速度与车的长度有关。
if (use_wheel_ && (v_odom.size() > 0)) {
try {
auto kf_cov_ = kf_state.get_P();
Eigen::Matrix<double, 3, 23> H_WHEEL = Eigen::Matrix<double, 3, 23>::Zero();
H_WHEEL.template block<3, 3>(0, 12) = Eigen::Matrix<double, 3, 3>::Identity(); //p rot R_l_i T_l_i vel bg ba g
Eigen::Matrix<double, 3, 3> odom_noise_ = Eigen::Matrix<double, 3, 3>::Zero();
if (flag_degen_)
if (slip_cov_[1] < 1)
odom_noise_.diagonal() << cov_wheel_, cov_wheel_, cov_wheel_;
else
odom_noise_.diagonal() << 3.0 * cov_wheel_, 3.0 * cov_wheel_, 3.0 * cov_wheel_;
else
odom_noise_.diagonal() << 10.0 * cov_wheel_, 10.0 * cov_wheel_, 10.0 * cov_wheel_;
Eigen::Matrix<double, 23, 3> K_WHEEL = kf_cov_ * H_WHEEL.transpose() * (H_WHEEL * kf_cov_ * H_WHEEL.transpose() + odom_noise_).inverse();
Eigen::Matrix<double, 3, 1> vel_odom(0, sqrt(pow(v_odom[wheel_num]->twist.linear.x, 2) + pow(angvel_last[2] * Wheel_T_wrt_IMU[1], 2)), 0.0); // + pow(angvel_last[3] * 0.8164, 2)
Eigen::Matrix<double, 3, 1> vel_world = imu_state.rot * vel_odom;
Eigen::Matrix<double, 23, 1> dx_ = K_WHEEL * (vel_world - imu_state.vel);
//std::cerr << "dx_" << dx_ << std::endl;
kf_cov_ = (Eigen::Matrix<double, 23, 23>::Identity() - K_WHEEL * H_WHEEL) * kf_cov_;
// update cov
kf_state.change_P(kf_cov_);
imu_state.pos += dx_.template block<3, 1>(0, 0);
imu_state.vel += dx_.template block<3, 1>(12, 0);
kf_state.change_x(imu_state);
//R_ = R_ * SO3::exp(dx_.template block<3, 1>(6, 0));
//Eigen::Matrix<double, 23, 23> J = Eigen::Matrix<double, 23, 23>::Identity();
//J.template block<3, 3>(6, 6) = Eigen::Matrix<double, 3, 3>::Identity() - 0.5 * SO3::hat(dx_.template block<3, 1>(6, 0));
//kf_state.change_P(J * kf_state.get_P() * J.transpose());
wheel_slip_vel_.push_back(v_odom[wheel_num]->twist.linear.x); //0-x,1-y,2-z
wheel_slip_gyr_.push_back(v_odom[wheel_num]->twist.angular.z);
} catch (exception &e) {
std::cerr << "Standard exception: " << e.what() << std::endl;
}
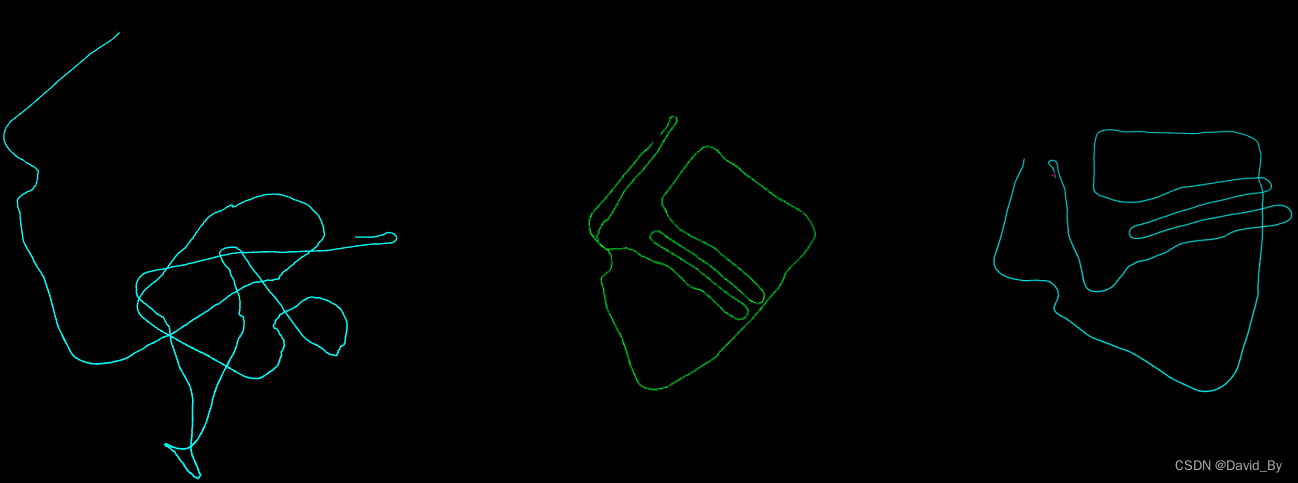
}左边为未添加轮速计的轨迹,中间为实际轨迹,右侧为添加轮子后的轨迹。发散后由于imu精度低存在角度评估不准的情况。持续优化中。















 969
969











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









