









自己部署FAST LIO2操作记录,在笔记本Ubuntu上。
更新子模块这步会失败
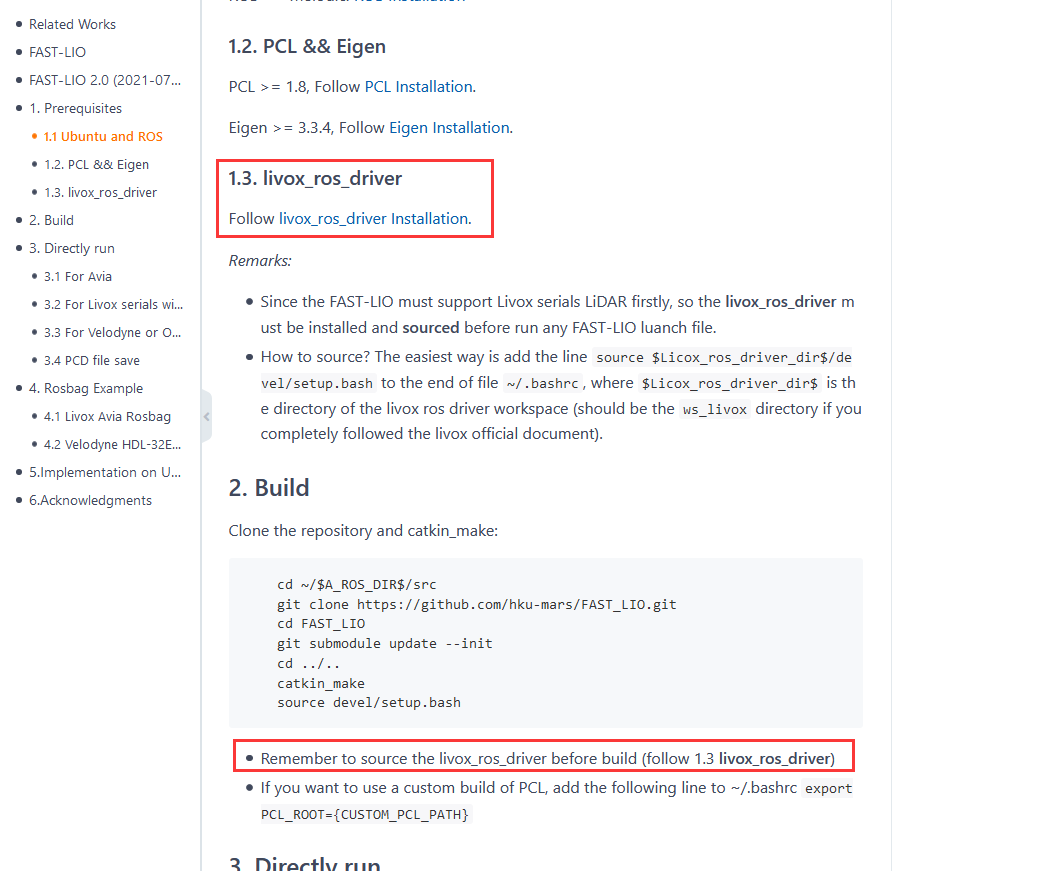
似乎还需要装好livox的功能包,应该是FAST LIO2编译的时候会用到里面的一些东西应该。 https://gitee.com/maxibooksiyi/FAST_LIO
先装livox的sdk,步骤就按照官方github的readme 来的,没有问题,也跟普通C++库的安装方法一样 GitHub - Livox-SDK/Livox-SDK: Drivers for receiving LiDAR data and more, support Lidar Mid-40, Mid-70, Tele-15, Horizon, Avia.
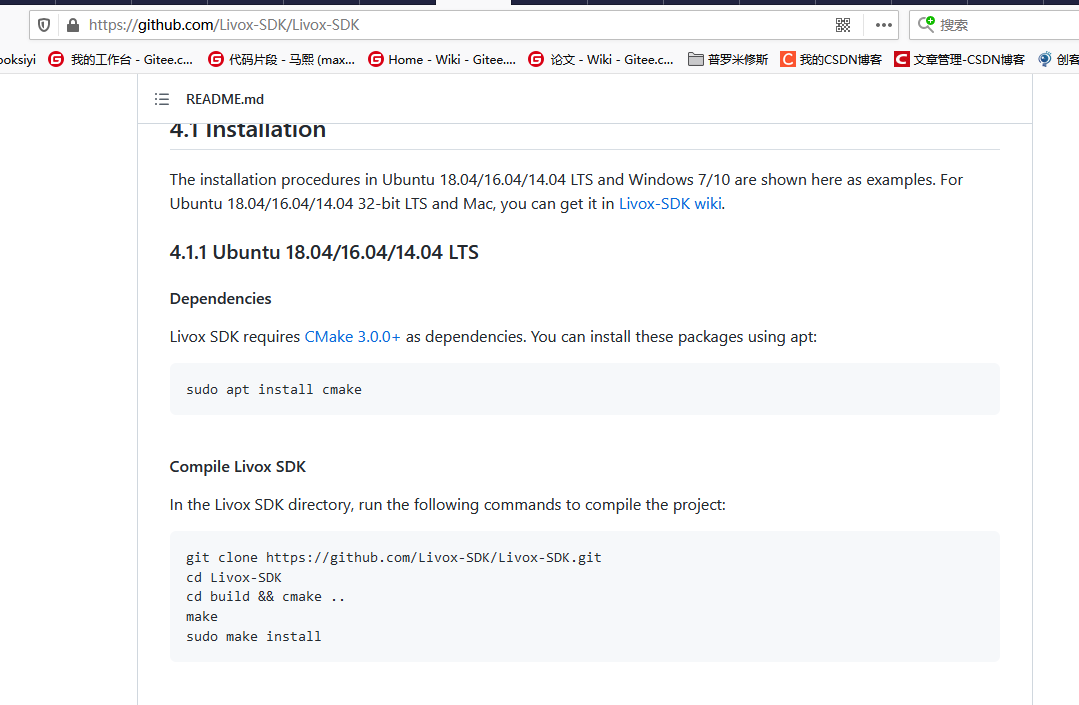
git clone https://github.com/Livox-SDK/Livox-SDK.git cd Livox-SDK cd build && cmake .. make sudo make install

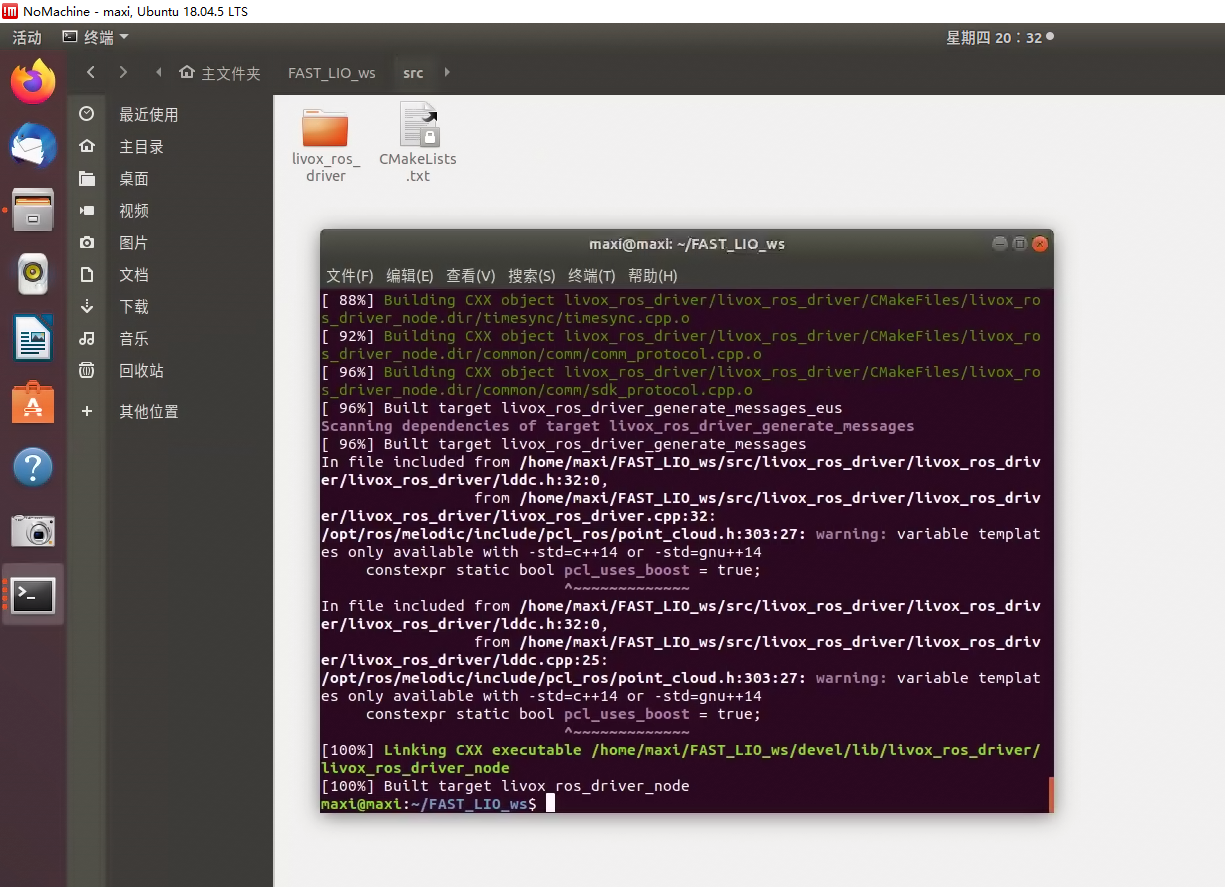
再装对应功能包,克隆到一个工作空间的src文件夹下,直接catkin_make就编译通过了,我这里放到和FASR_LIO2一个工作空间里面了,估计会有什么调用,不在一个工作空间也可以,得source一下
https://gitee.com/maxibooksiyi/livox_ros_driver.git
然后下FAST_LIO2
把FAST_LIO功能包下到和livox_ros_driver同一个工作空间的src文件夹下
git clone https://gitee.com/maxibooksiyi/FAST_LIO.git
然后需要更新子模块,因为踩过坑又看了别人的博客也是这样,直接更新子模块下不下来,说没有权限,直接把对应文件夹克隆到对应仓库下面。注意克隆下来也不是直接放,有注意点,下面有说。
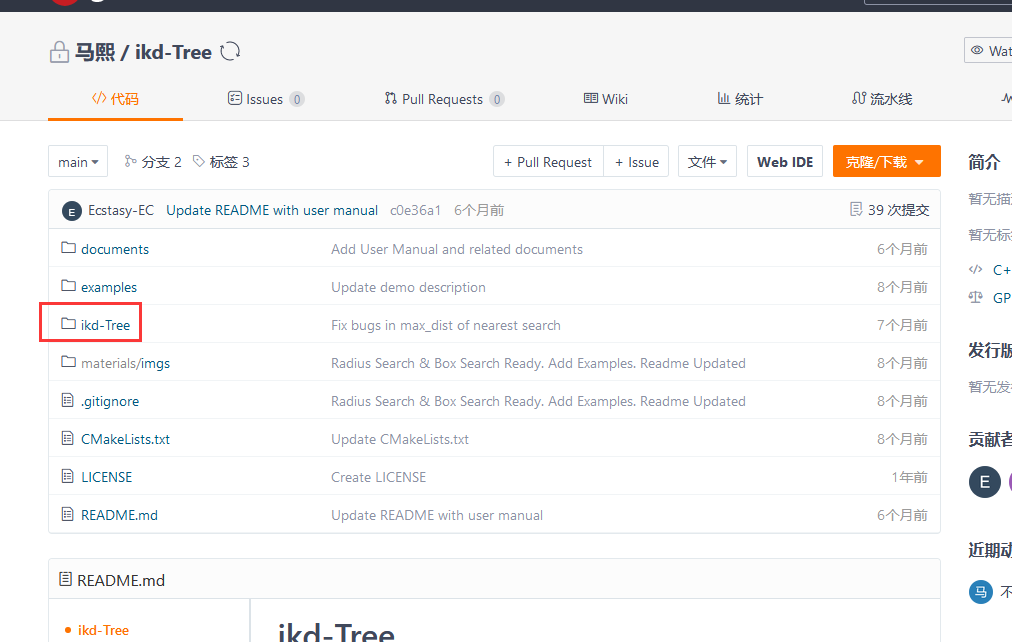
https://gitee.com/maxibooksiyi/ikd-Tree.git
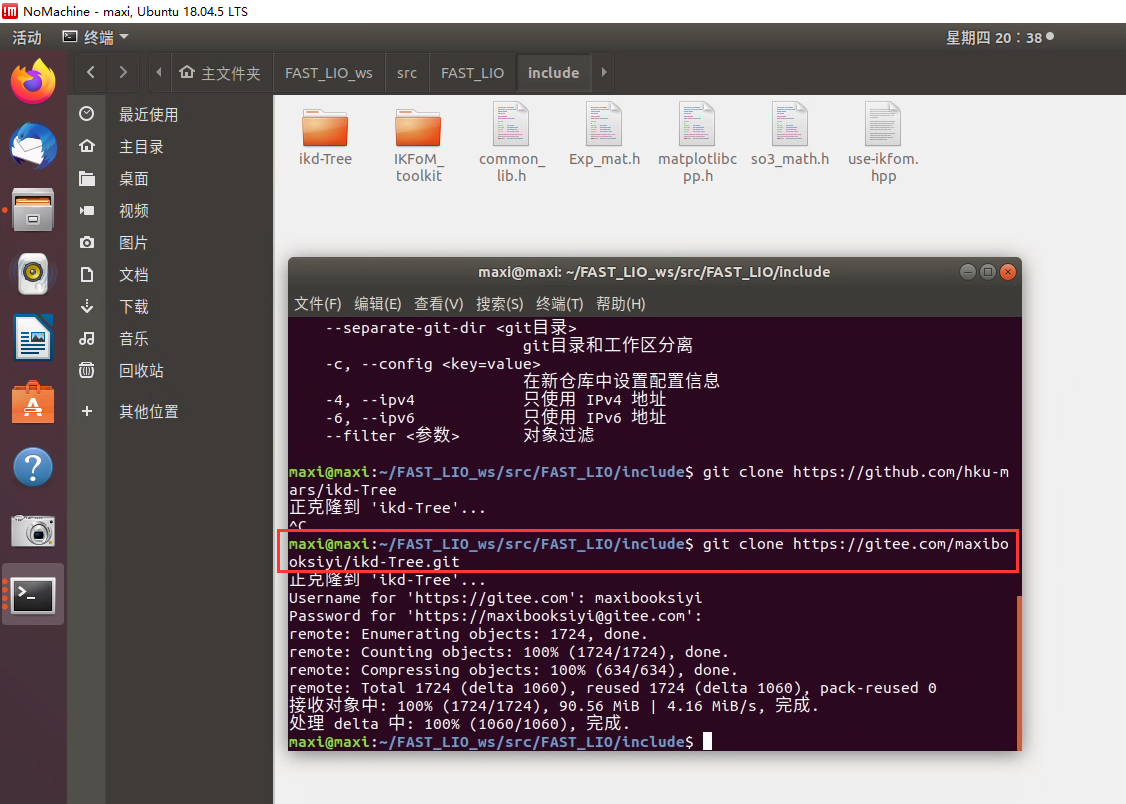
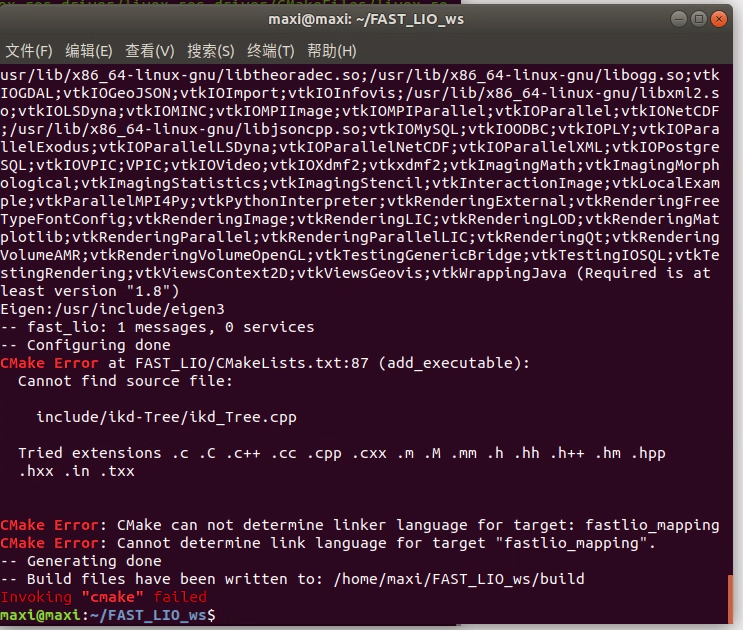
这个idK-Tree需要注意,是把idK-Tree仓库里面的idK-Tree文件夹放到FAST_LIO的include文件夹下面,不是直接把整个idK-Tree仓库放到FAST_LIO的include文件夹下面,否则catkin_make的时候会报找不到源文件的错误
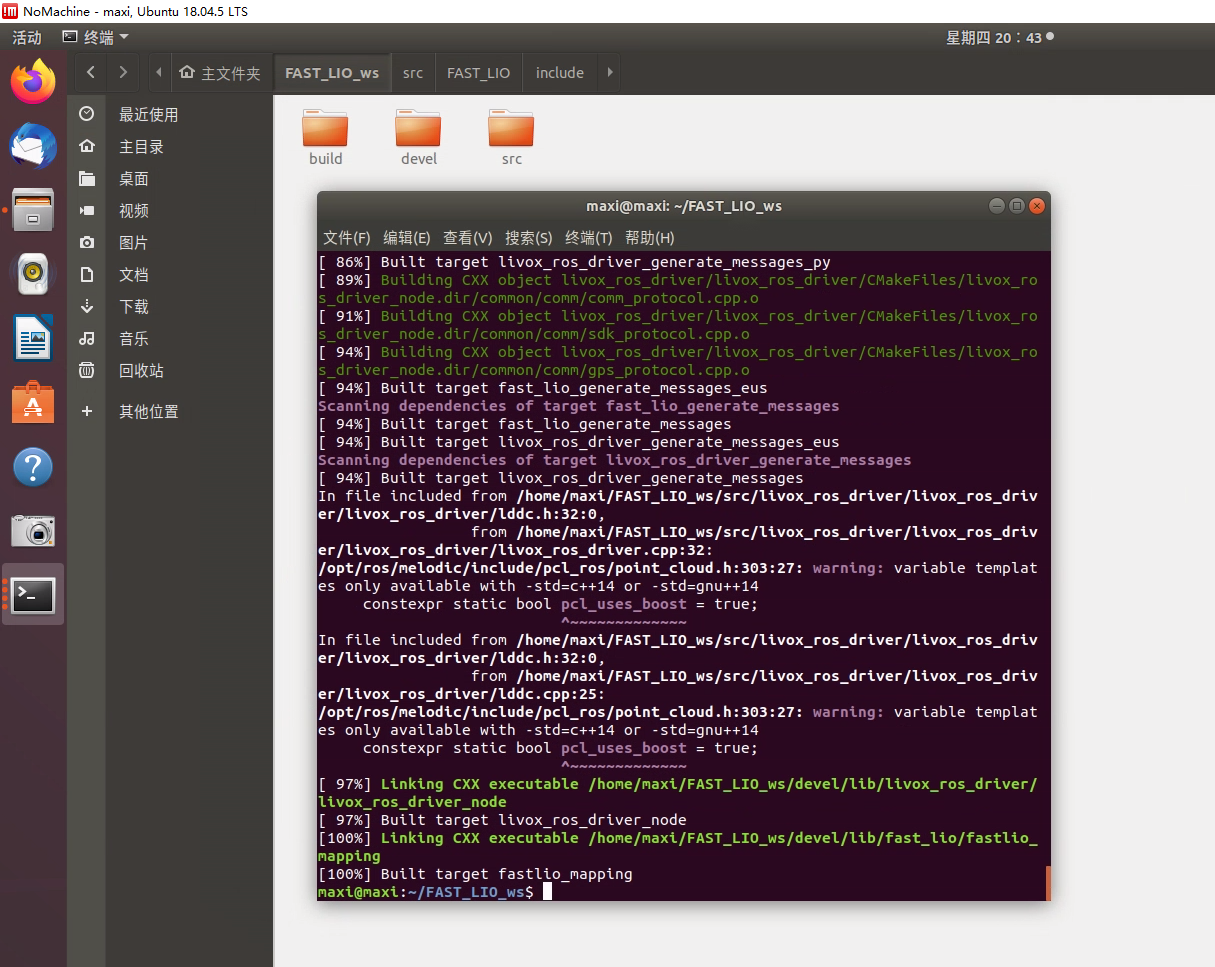
最后catkin_make也比较快编译完了,我感觉激光SLAM是不是不用opencv相比于视觉SLAM少些环境上的问题?
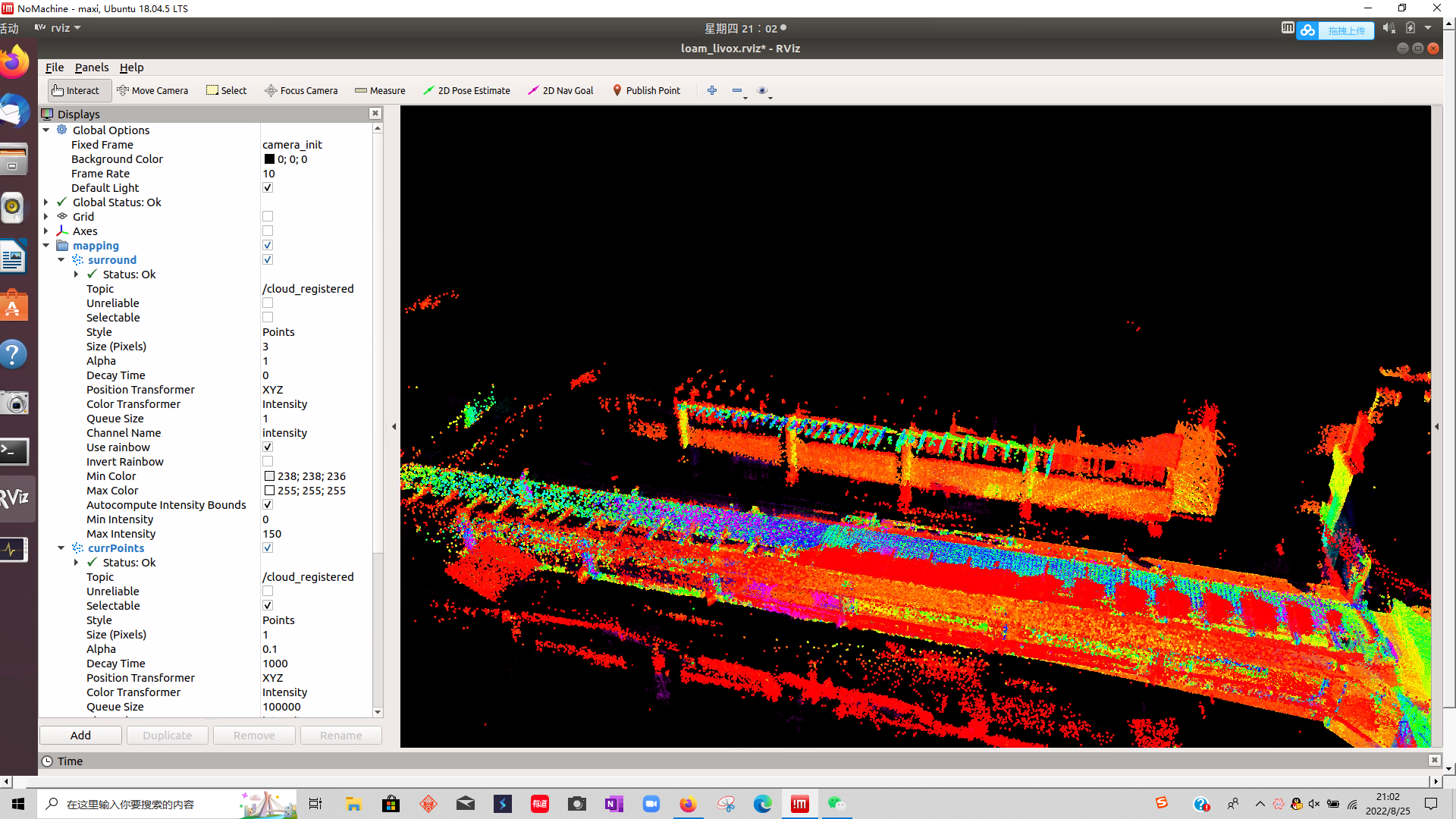
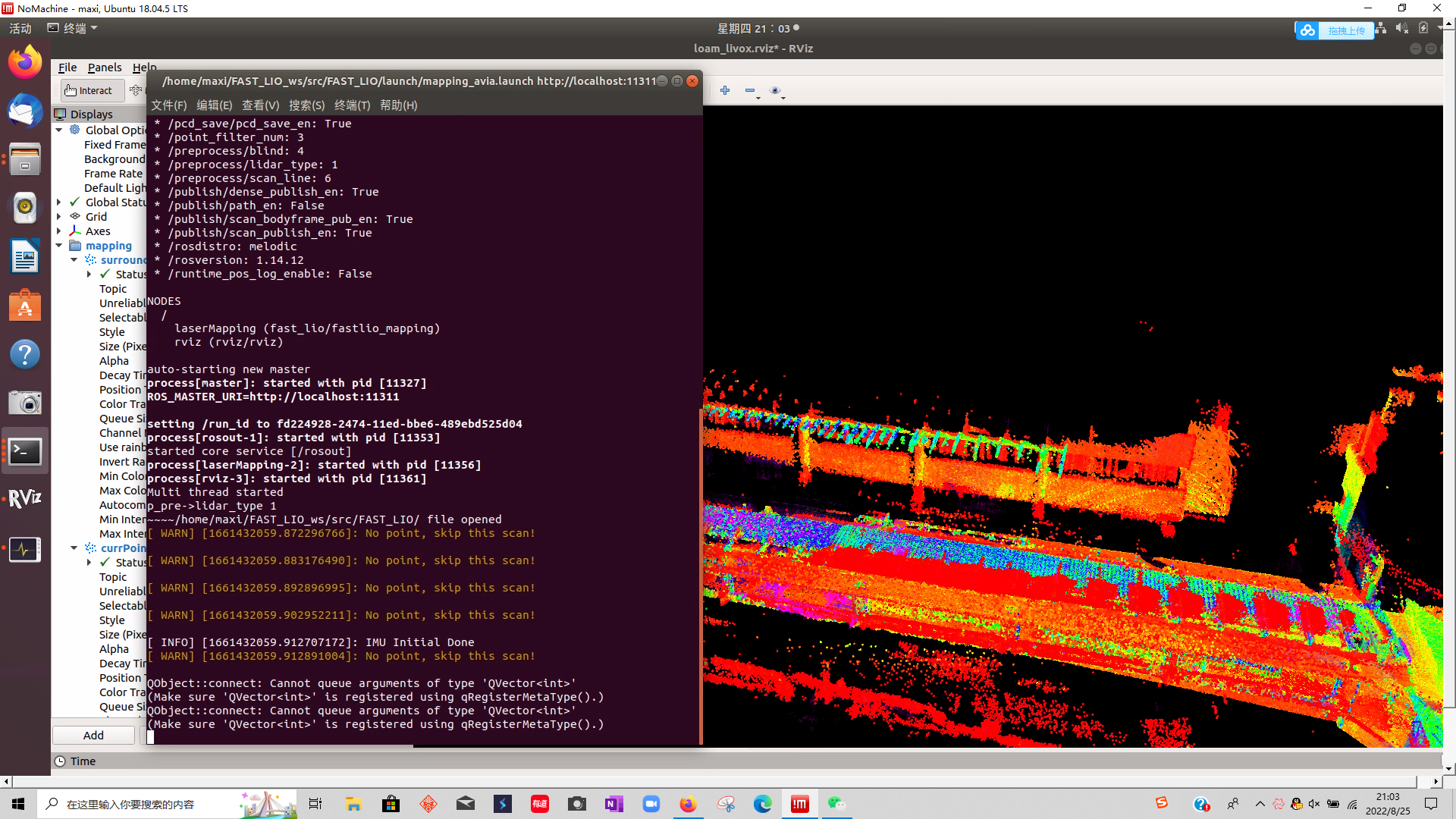
FAST_LIO2跑起来了,感觉很爽!!!! 就运行了两个命令
roslaunch fast_lio mapping_avia.launch rosbag play YOUR_DOWNLOADED.bag
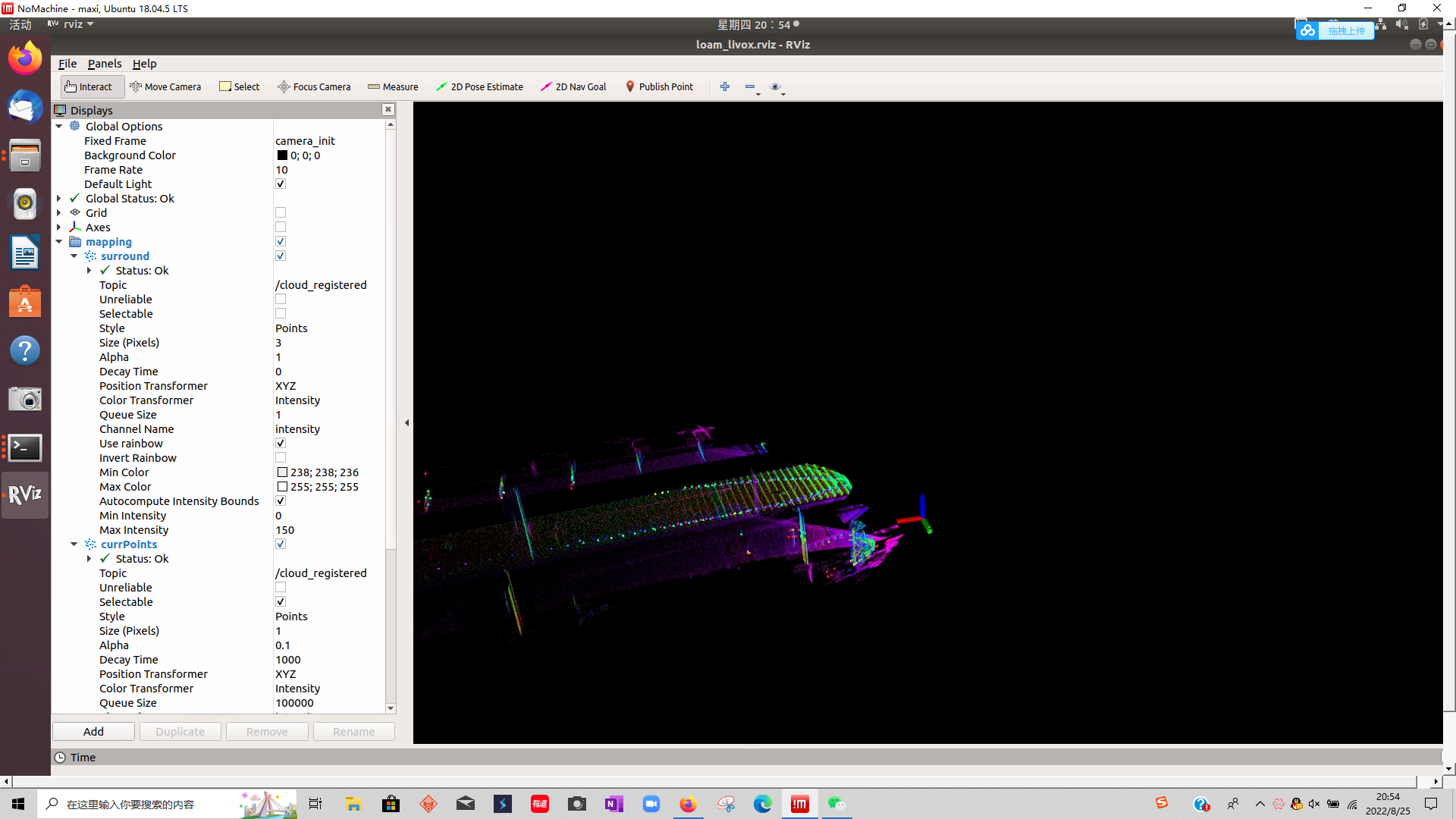
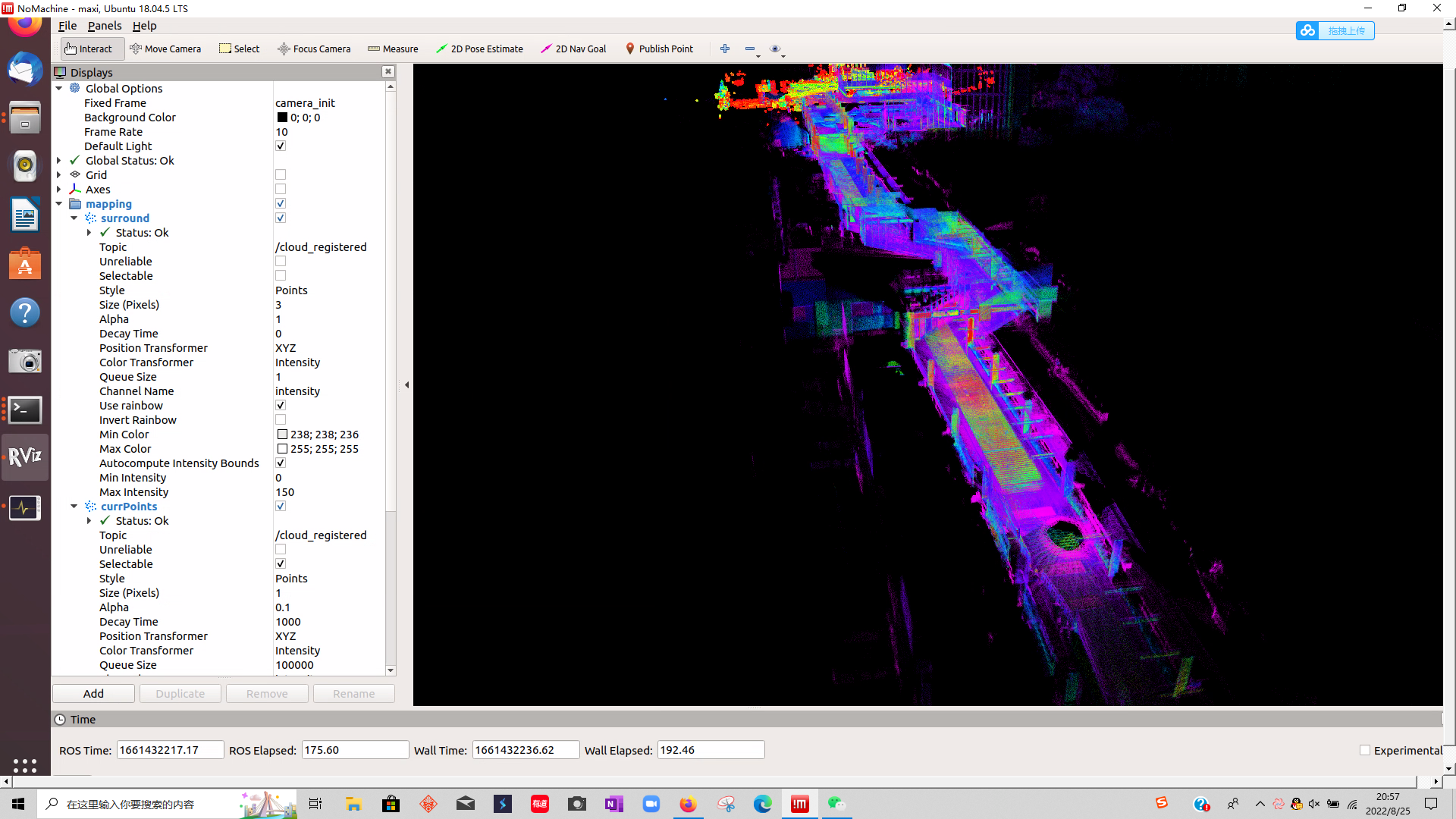
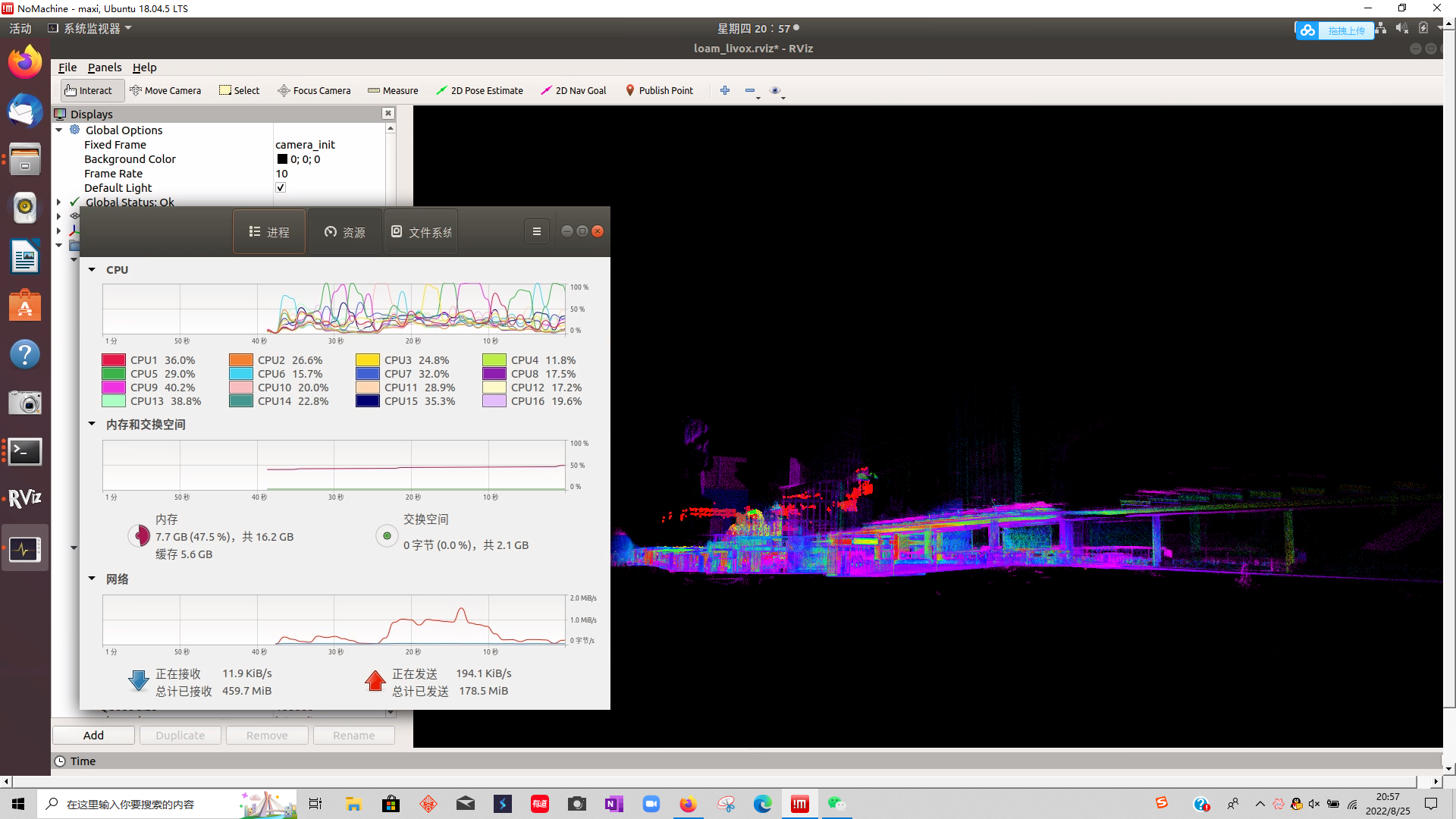
感觉电脑变得有点卡,主要是rviz变得很卡,可能是rviz的点云太多了

rostopic echo /Odometry
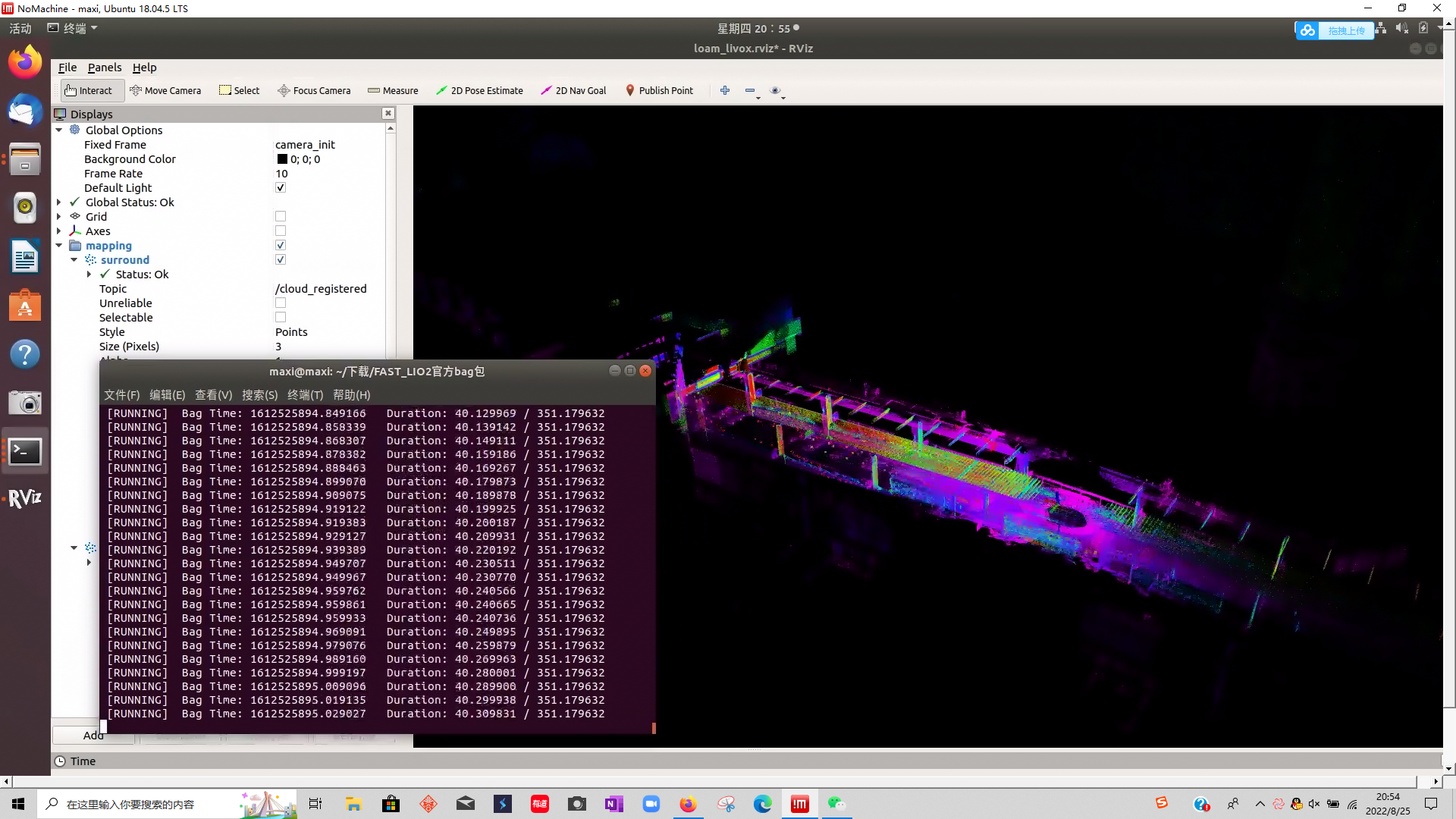
启动mapping_avia.launch的终端打印
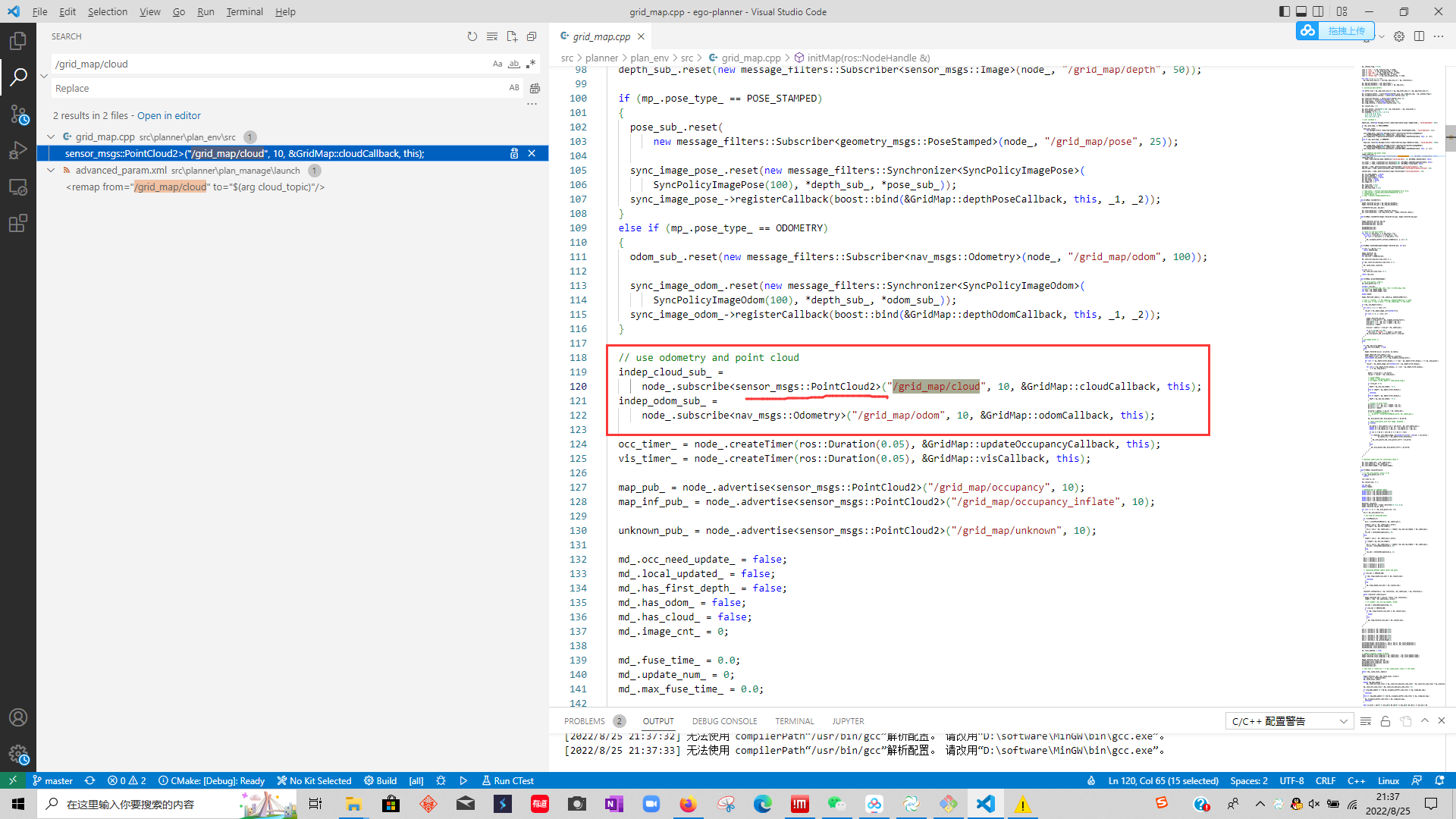
在ego-planner的代码里可以找到,订阅的激光点云话题是这个类型的 sensor_msgs::PointCloud2
这是当时跑的bag包















 1097
1097











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









