







Robotiq电动夹持器是一款常见的机械臂加持设备,有两指、三指等多种型号,我所接触的是RobotIQ 2f-140型号,下面介绍该电动手抓在ROS下的驱动包配置及使用方法。
操作系统:Ubuntu16.04
ROS版本:Kinetic
电爪型号:RobotIQ 2f-140
电爪接口:ModBus RTU转usb接口
供电电压:24V
1、下载robotiq功能包
建立一个空的catkin空间robotiq_ws,下载robotiq的ROS功能包
mkdir -p robotiq_ws/src
cd robotiq_ws/src/
git clone https://github.com/ros-industrial/robotiq.git
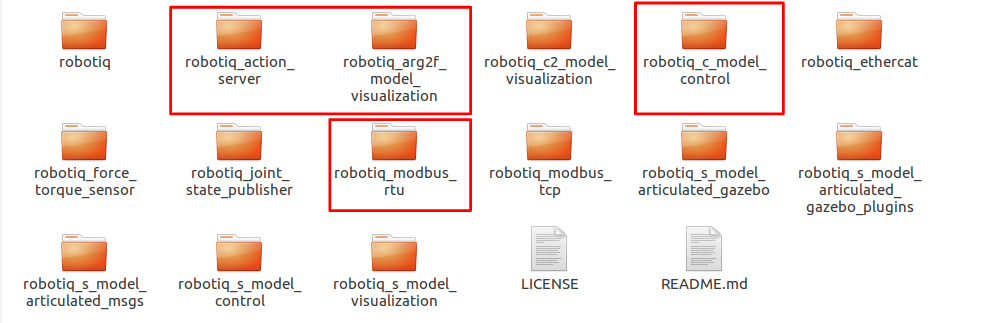
红色线框是最基本的一些功能包,如果想减少一些编译的复杂度,其余用不到的包可以先删掉。
robotiq_action_server:服务节点
robotiq_c_model_control:C-model控制节点,C应该是指Client客户端,下面还有S-model服务端,本示例使用的是C-model
2、安装驱动组件
在上述工作空间中,安装相关依赖
rosdep install robotiq_modbus_rtu //请在空间的src目录下执行该命令,该命令会查找安装robotiq_modbus_rtu包所需要的相关依赖
sudo apt-get install ros-kinetic-soem
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1066
1066











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









