







 超级会员免费看
超级会员免费看
 该博客介绍了PLC的模糊PID控制原理和实现过程,包括模糊化、模糊规则确定、解模糊等步骤。作者详细讨论了如何在博途PLC中设计三角隶属度函数,并提供了STL代码示例。此外,还分享了SMART PLC中梯形图实现模糊PID的资源链接,以及模糊控制器的输出和在博途环境下的调用方法。
该博客介绍了PLC的模糊PID控制原理和实现过程,包括模糊化、模糊规则确定、解模糊等步骤。作者详细讨论了如何在博途PLC中设计三角隶属度函数,并提供了STL代码示例。此外,还分享了SMART PLC中梯形图实现模糊PID的资源链接,以及模糊控制器的输出和在博途环境下的调用方法。
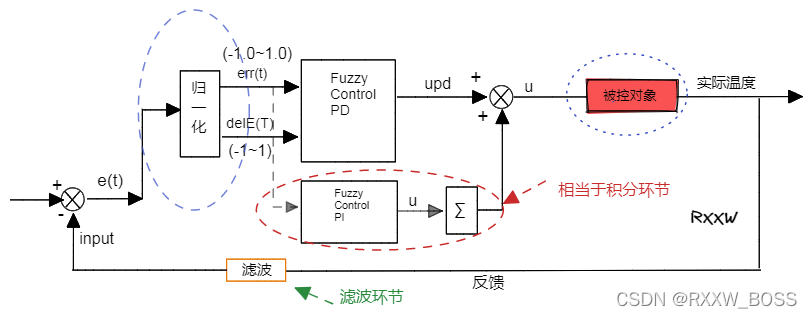
模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分,小车通过传感器采集赛道信息,PLC通过温度传感器获取炉内温度,确定当前实际温度和设定目标值的偏差e(error), e=setpoint-input以及偏差的变化ec(当前偏差-上次偏差),根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数
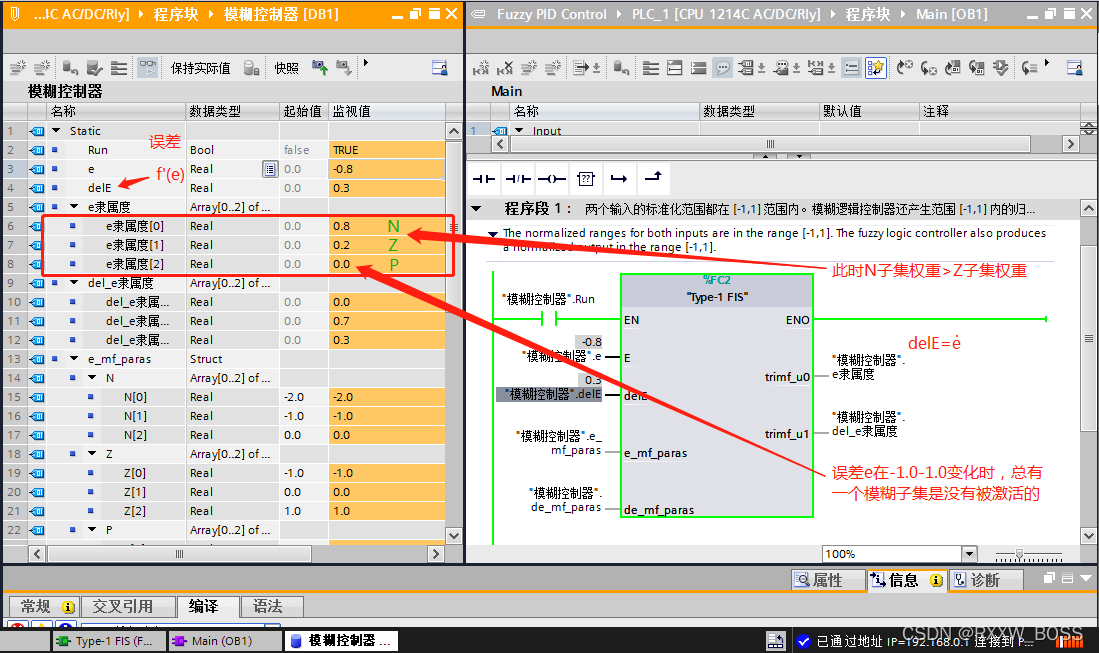
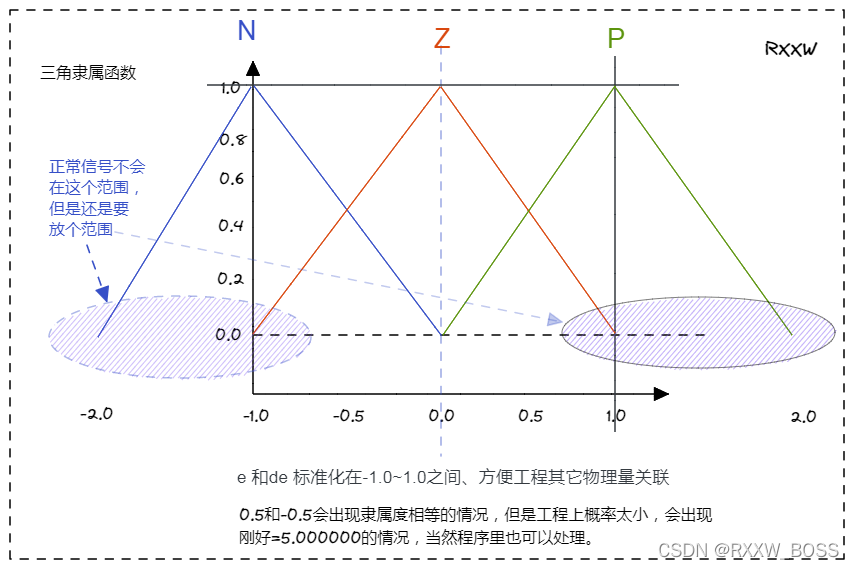
其次我们需要对这2个参数进行模糊化,e 、 ec 这里我对e进行举例,两个输入的标准化范围都在 [-1,1] 范围内。模糊逻辑控制器还产生范围 [-1,1] 内的归一化输出。
1、模糊PID框图
 <
<
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1994
1994

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











