







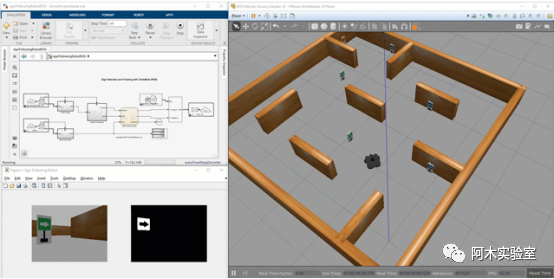
之前阿木实验室提供了一系列室内定位的方案,以及对各自的特点进行了介绍。本期我们采用T265的视觉定位方案,Matlab ROS Toolbox进行了VFH室内避障测试。
Matlab ROS Toolbox
众所周知,Matlab是一款强大的数据处理工具,在科研、教学、商业领域广泛应用,不管从事哪个行业的工作,多多少少都会用过或者听说过这款工具。Matlab有一个工具箱,可以提供丰富而强大的扩展功能,其中有一个ROS Toolbox,是matlab r2019b推出一个工具箱,这个工具箱提供了一些机器人需要用到的工具,当然也包括ROS相关的工具。
ROS Toolbox为 MATLAB 和 Simulink 与机器人操作系统(ROS)相互连接提供了一个接口,以便能够创建一个 ROS 节点网络。该工具箱包含 MATLAB 的各种功能以及用于导入、分析和回放 rosbag 文件中记录的 ROS 数据的 Simulink 模块,您还可以连接到实时 ROS 网络以访问 ROS 消息。
这个工具箱也可连接到 Gazebo 等外部机器人仿真器,通过桌面仿真的方式来验证 ROS 节点。ROS 工具箱支持 C++ 代码生成,方便从 Simulink 模型自动生成ROS 节点,然后部署到仿真硬件或物理硬件。
更多关于Matlab ROS Toolbox的参考资料请查看官网:
https://ww2.mathworks.cn/products/ros.html
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









