







前言
室内探索无人机是一种专为在室内环境中进行任务的无人机系统。相比传统的人员部署,室内探索无人机具有更高的灵活性和机动性,能够在复杂的室内环境中执行任务,用于未知环境的探索和特定目标的搜索。
为完成无人机室内搜索与识别等复杂任务,阿木实验室推出了一套全新的室内无人机探索系统。该系统集成了自主定位、视觉SLAM模块、路径规划模块和目标识别模块等关键算法和功能,为开发者提供一套开源、智能的室内无人机探索解决方案。
任务规则
预设有10×16米的矩形房间一间,前后各设有一个标准门,前后均有一个一个标准门,外侧设有3扇窗户,房间内有桌椅板凳若干、立柱若干、文件柜若干、会议桌若干以及人员若干。
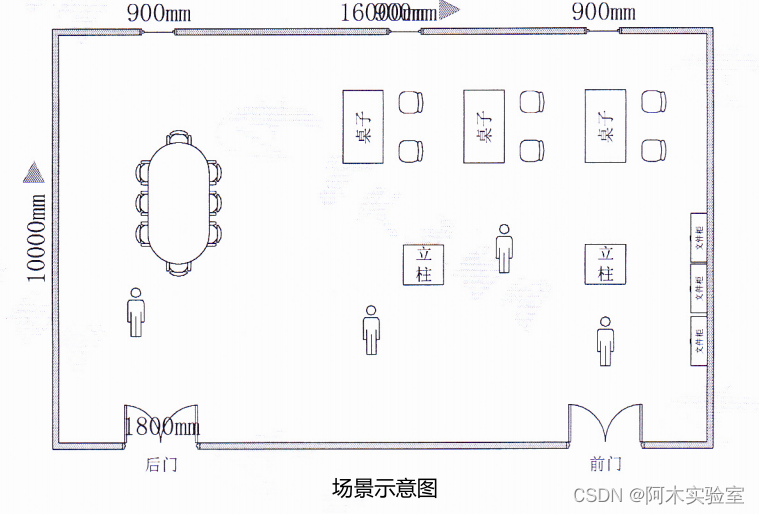
实验者通过地面站对飞行参数进行配置,指定起飞点与返回点。起飞之后,无人机按照预设定的进入点进入房间,采取全程自主飞行模式,对房间内指定目标进行搜索,发现目标物体且判明目标类别和位置,将目标信息回传至地面站并拍照记录,同步将目标位置显示到规划地图之中。搜索完毕后,从指定返回出库返回并降落。
解决方案
1、仿真方案
-
硬件平台
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 257
257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









