







Reference:
1. 概念
对于一般线性插值来说:
r
=
P
0
+
(
P
1
−
P
0
)
t
\mathbf{r}=\mathbf{P}_0+\left(\mathbf{P}_1-\mathbf{P}_0\right) t
r=P0+(P1−P0)t,其中
t
∈
[
0
,
1
]
\mathrm{t} \in[0,1]
t∈[0,1],代表了插值矢量
r
\mathbf{r}
r 末端在弦
P
0
−
P
1
\mathbf{P}_0-\mathbf{P}_1
P0−P1 上的位置。假如
t
t
t 取值为
1
/
4
1 / 4
1/4、
2
/
4
2 / 4
2/4、
3
/
4
3 / 4
3/4 即将
P
0
P
1
\mathbf{P}_0 \mathbf{P}_1
P0P1 弦长均分为
4
4
4 等份, 可以看出其对应的弧长并不相等。靠近中间位置的弧长较长,而靠近两段处的弧长较短,这就意味着当
t
t
t 匀速变化时,代表姿态矢量的角速度变化并不均匀:

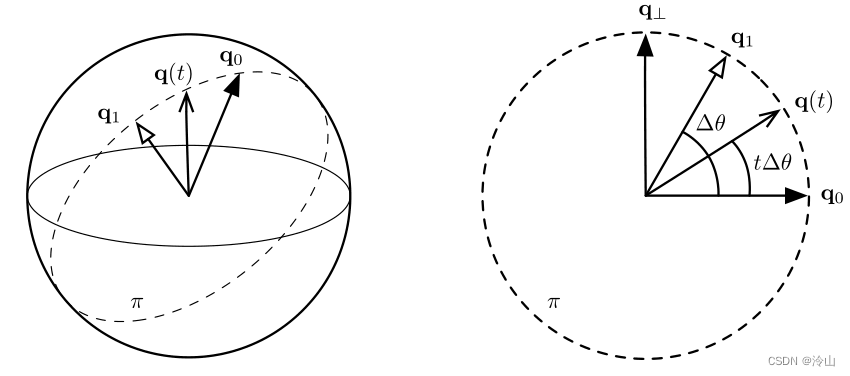
球面线性插值(Spherical linear interpolation, 通常简称Slerp)是四元数的一种线性插值运算,主要用于在两个表示旋转的四元数之间平滑差值。
通常Slerp会用在SLAM轨迹插值中,设
p
\mathbf{p}
p 对应的时刻为
t
1
t_1
t1,
q
\mathbf{q}
q 对应的时刻为
t
2
t_2
t2,
t
′
t^{\prime}
t′ 时刻对应的四元数为
r
\mathbf{r}
r,即为所求,于是比例系数
t
t
t 满足:
t
=
t
′
−
t
1
t
2
−
t
1
t=\frac{t^{\prime}-t_1}{t_2-t_1}
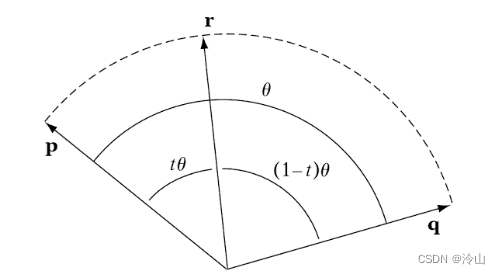
t=t2−t1t′−t1注意单位四元数
p
\mathbf{p}
p 和
q
\mathbf{q}
q 之间的夹角为
θ
\theta
θ,
p
\mathbf{p}
p 和
r
\mathbf{r}
r 之间的夹角为
t
θ
t \theta
tθ,
q
\mathbf{q}
q 和
r
\mathbf{r}
r 之间的夹角为
(
1
−
t
)
θ
(1-t) \theta
(1−t)θ。按一般的插值公式写出
r
\mathbf{r}
r 的表达式如下,即要找到合适的
a
(
t
)
a(t)
a(t) 和
b
(
t
)
b(t)
b(t):
r
=
a
(
t
)
p
+
b
(
t
)
q
\mathbf{r}=a(t) \mathbf{p}+b(t) \mathbf{q}
r=a(t)p+b(t)q同时有:
cos
θ
=
p
⋅
q
,
cos
(
t
θ
)
=
p
⋅
r
,
cos
[
(
1
−
t
)
θ
]
=
q
⋅
r
\cos \theta=\mathbf{p} \cdot \mathbf{q}, \cos (t \theta)=\mathbf{p} \cdot \mathbf{r}, \cos [(1-t) \theta]=\mathbf{q} \cdot \mathbf{r}
cosθ=p⋅q,cos(tθ)=p⋅r,cos[(1−t)θ]=q⋅r用
p
\mathbf{p}
p 同时点乘
r
=
a
(
t
)
p
+
b
(
t
)
q
\mathbf{r}=a(t) \mathbf{p}+b(t) \mathbf{q}
r=a(t)p+b(t)q 两边可以得到:
p
⋅
r
=
p
⋅
[
a
(
t
)
p
+
b
(
t
)
q
]
cos
(
t
θ
)
=
a
(
t
)
+
b
(
t
)
cos
(
θ
)
\begin{array}{l} \mathbf{p} \cdot \mathbf{r}=\mathbf{p} \cdot[a(t) \mathbf{p}+b(t) \mathbf{q}] \\ \cos (t \theta)=a(t)+b(t) \cos (\theta) \end{array}
p⋅r=p⋅[a(t)p+b(t)q]cos(tθ)=a(t)+b(t)cos(θ)用
q
\mathbf{q}
q 同时点乘
r
=
a
(
t
)
p
+
b
(
t
)
q
\mathbf{r}=a(t) \mathbf{p}+b(t) \mathbf{q}
r=a(t)p+b(t)q 两边可以得到:
q
⋅
r
=
q
⋅
[
a
(
t
)
p
+
b
(
t
)
q
]
cos
[
(
1
−
t
)
θ
]
=
a
(
t
)
cos
(
θ
)
+
b
(
t
)
\begin{array}{c} \mathbf{q} \cdot \mathbf{r}=\mathbf{q} \cdot[a(t) \mathbf{p}+b(t) \mathbf{q}] \\ \cos [(1-t) \theta]=a(t) \cos (\theta)+b(t) \end{array}
q⋅r=q⋅[a(t)p+b(t)q]cos[(1−t)θ]=a(t)cos(θ)+b(t)联立上面两个公式可得:
a
(
t
)
=
sin
[
(
1
−
t
)
θ
]
sin
θ
b
(
t
)
=
sin
(
t
θ
)
sin
θ
\begin{array}{c} a(t)=\frac{\sin [(1-t) \theta]}{\sin \theta} \\ b(t)=\frac{\sin (t \theta)}{\sin \theta} \end{array}
a(t)=sinθsin[(1−t)θ]b(t)=sinθsin(tθ)于是有:
Slerp
(
p
,
q
,
t
)
=
sin
[
(
1
−
t
)
θ
]
⋅
p
+
sin
(
t
θ
)
⋅
q
sin
θ
\operatorname{Slerp}(\mathbf{p}, \mathbf{q}, t)=\frac{\sin [(1-t) \theta] \cdot \mathbf{p}+\sin (t \theta) \cdot \mathbf{q}}{\sin \theta}
Slerp(p,q,t)=sinθsin[(1−t)θ]⋅p+sin(tθ)⋅q
也就是MATLAB上写的:
-
Quaternion spherical linear interpolation (SLERP) is an extension of linear interpolation along a plane to spherical interpolation in three dimensions. Given two quaternions, q 1 q_1 q1 and q 2 q_2 q2, SLERP interpolates a new quaternion, q 0 q_0 q0, along the great circle that connects q 1 q_1 q1 and q 2 q_2 q2. The interpolation coefficient, T T T, determines how close the output quaternion is to either q 1 q_1 q1 and q 2 q_2 q2.
The SLERP algorithm can be described in terms of sinusoids:
q 0 = s i n ( ( 1 − T ) θ ) s i n ( θ ) q 1 + s i n ( T θ ) s i n ( θ ) q 2 q_0=\frac{sin((1−T)θ)}{sin(θ)}q1+\frac{sin(Tθ)}{sin(θ)}q2 q0=sin(θ)sin((1−T)θ)q1+sin(θ)sin(Tθ)q2where q 1 q_1 q1 and q 2 q_2 q2 are normalized quaternions, and θ θ θ is half the angular distance between q 1 q_1 q1 and q 2 q_2 q2.
2. 问题
注意上面公式存在以下问题,需要在实现过程中考虑:
- 如果四元数点积的结果是负值(夹角大于90°),那么后面的插值就会在4D球面上绕远路。为了解决这个问题,先测试点积的结果,当结果是负值时,将两个四元数的其中一个取反(并不会改变它代表的朝向)。而经过这一步操作,可以保证这个旋转走的是最短路径。
- 当 p \mathbf{p} p 和 q \mathbf{q} q 的夹角 θ \theta θ 差非常小时会导致 sin θ → 0 \sin \theta \rightarrow 0 sinθ→0,这时除法可能会出现问题。为了避免这样的问题,当 θ \theta θ 非常小时可以使用简单的线性插值代替 ( θ → 0 (\theta \rightarrow 0 (θ→0 时, sin θ ≈ θ ) \sin \theta \approx \theta) sinθ≈θ),因此方程退化为线性方程: slerp ( p , q , t ) = ( 1 − t ) p + t q \operatorname{slerp}(\mathbf{p}, \mathbf{q}, t)=(1-t) \mathbf{p}+t \mathbf{q} slerp(p,q,t)=(1−t)p+tq















 7457
7457











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









