






KITTI数据集转化为.bag形式
1.制作100Hzimu数据包bag:
python kitti2bag.py -t 2011_10_03 -r 0027 raw_synced
到kitti 官网下载 2011_10_03_drive_0027 的extract数据集 (原来的 sync数据集为去除相机畸变的数据集,但是IMU发布频率只有10HZ 显然不满足进行多传感器融合处理,extract的数据集为raw_data ,IMU频率为100HZ,但是没有进行相机去畸变)。
https://github.com/TixiaoShan/LIO-SAM/tree/master/config/doc/kitti2bag
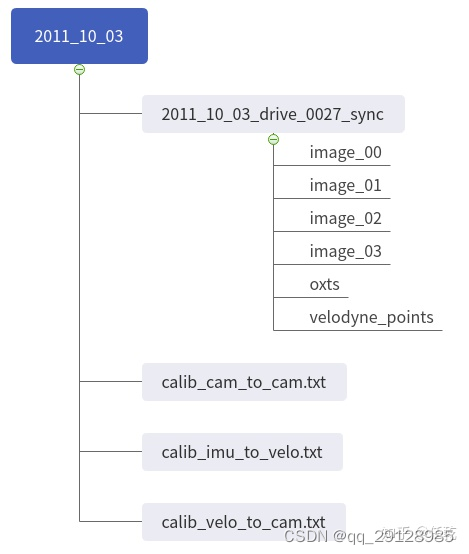
目录结构类似:从零开始做自动驾驶定位(二): 数据集

evo工具的使用
pip install evo --upgrade --no-binary evo



1.绘制多条轨迹比较
evo_traj tum groundtruth.txt estimate.txt --ref=groundtruth.txt -va -p
2.APE和RPE
两种突出的方法是绝对姿态误差(APE)和相对姿态误差(RPE)。
APE绝对位姿误差,常被用作绝对轨迹误差(ATE),适用于评估SLAM系统估计轨迹和参考轨迹的全局一致性。
RPE相对位姿误差,比较相对运动(姿态增量),适用于评估里程计的局部精度,例如系统每米的平移或者旋转漂移量。
evo_ape tum groundtruth.txt estimate.txt -r trans_part -va --plot --plot_mode xyz --save_plot ./
evo_rpe tum groundtruth.txt estimate.txt -r trans_part -va --plot --plot_mode xyz --save_plot ./
evo_rpe tum groundtruth.txt estimate.txt -r trans_part --delta 1 --delta_unit m -va --plot --plot_mode xyz --save_plot ./
To evaluate monocular visual SLAM,type
evo_ape tum street_07.txt your_result.txt -vaps
To evaluate LIDAR SLAM,type
evo_ape tum street_07.txt your_result.txt -vap
To test GNSS based methods,type
evo_ape tum street_07.txt your_result.txt -vp
–ref=指定参考轨迹
-va: 对齐
-p/plot:绘制
–save_results results/ORB.zip















 714
714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









