






在上一个版本上进行完善,增加了很多可配置参数,修复了之前的版本BUG,再次推荐给大家,用过的都说好!
YOLO_ROS2
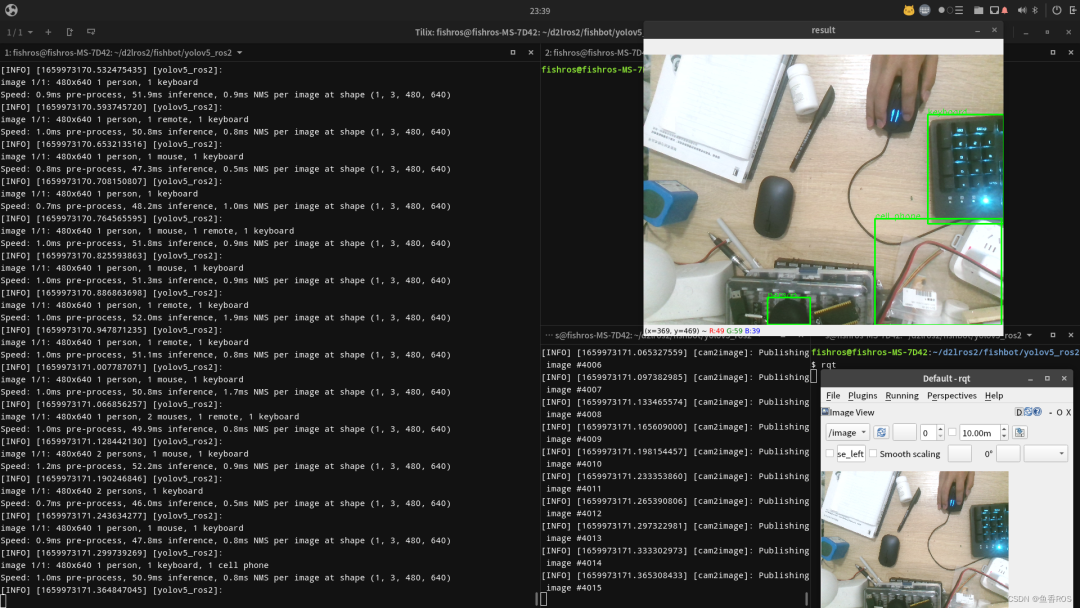
基于YOLO(V5/V7)的ROS2封装,允许用户使用给定的模型文件和相机参数进行三维空间物体检测和抓取操作。
1. 安装依赖
首先,确保您已经更新了系统并且安装了必要的依赖。以下是一些安装步骤,其中$ROS_DISTRO 是您的ROS2发行版(例如:foxy、galactic):
sudo apt update
sudo apt install python3-pip ros-$ROS_DISTRO-vision-msgs
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple yolov5 # 推荐使用v5,但如果需要使用v7,可以运行 pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple yolov7
2. 编译和运行
编译项目并设置环境变量:
colcon build
source install/setup.bash
现在,您可以运行Yolo_ROS2节点。默认情况下,它将使用CPU来进行检测,使用名为/image的图像话题。您可以根据需要更改这些参数:
ros2 run yolov5_ros2 yolo_detect_2d --ros-args -p device:=cpu -p image_topic:=/image
如果您要使用真实相机,请修改默认的图像话题(image_topic:=/image),然后在另一个终端中运行以下命令来将相机图像转化为ROS话题:
ros2 run image_tools cam2image --ros-args -p width:=640 -p height:=480 -p frequency:=30.0 -p device_id:=-1
您也可以使用其他相机,例如usb_cam。在这种情况下,安装相应的包并运行usb_cam节点:
sudo apt-get install ros-<ros2-distro>-usb-cam # 安装
ros2 run usb_cam usb_cam_node_exe

3. 订阅结果
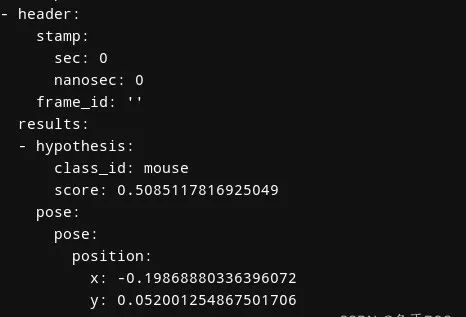
Yolo_ROS2将检测结果发布到/yolo_result话题中,包括原始像素坐标以及归一化后的相机坐标系下的x和y坐标。您可以使用以下命令查看检测结果:
ros2 topic echo /yolo_result
4. 更进一步使用
4.1 参数设置
在运行Yolo_ROS2节点时,您可以使用 -p name:=value 的方式来修改参数值。
4.1.1 图像话题
您可以通过指定以下参数来更改图像话题:
image_topic:=/image
4.1.2 计算设备设置
如果您有CUDA支持的显卡,可以选择以下参数来配置计算设备:
device:=cpu
4.1.3 是否实时显示结果
您可以使用以下参数来控制是否实时显示检测结果。设置为True将实时显示结果,设置为False则不会显示:
show_result:=False
请注意,实时显示中的cv2.imshow可能会卡住。如果只需要验证结果,可以将此参数设置为False。
4.1.4 切换不同Yolov5模型
默认情况下,Yolo_ROS2使用yolov5s模型。您可以通过以下参数来更改模型:
model:=yolov5m
4.1.5 是否发布结果图像
如果您希望Yolo_ROS2发布检测结果的图像,请使用以下参数:
pub_result_img:=True
这将允许您通过/result_img话题查看检测结果的图像。
4.1.5 相机参数文件
功能包默认从 /camera/camera_info 话题获取相机参数,在获取成功前,相机参数文件路径可以通过参数进行设置,参数为:camera_info_file,通过该参数可以设置文件路径,注意需要使用绝对目录:
camera_info_file:=/home/fishros/chapt9/src/yolov5_ros2/config/camera_info.yam

















 569
569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









