







👉👉👉**无人机硬件,提供全程指导**👈👈👈
文章目录
前言
准备材料:
四旋翼机架+动力
PIXHAWK4飞控
M8N GPS(提供定位)
遥控器+接收机(提供遥控信号)
数传(提供遥测信号)
PM02电流计(给飞控供电,同时测量电池电压和放电电流)
3S/4S电池(供电)
减震板(降低高频振动)
树莓派(可选)
👉👉👉硬件链接👈👈👈
X8构型无人机材料
X8的机架需要每个轴的电机座上下都能安装电机,且电机不能用自锁电机,否则电机座下面的电机不好工作。
软件:
PX4固件
QGC地面站
飞控端口定义如下
https://download.csdn.net/download/qq_38768959/74467915
机架的安装不做叙述,按照机架的安装教程进行安装即可。
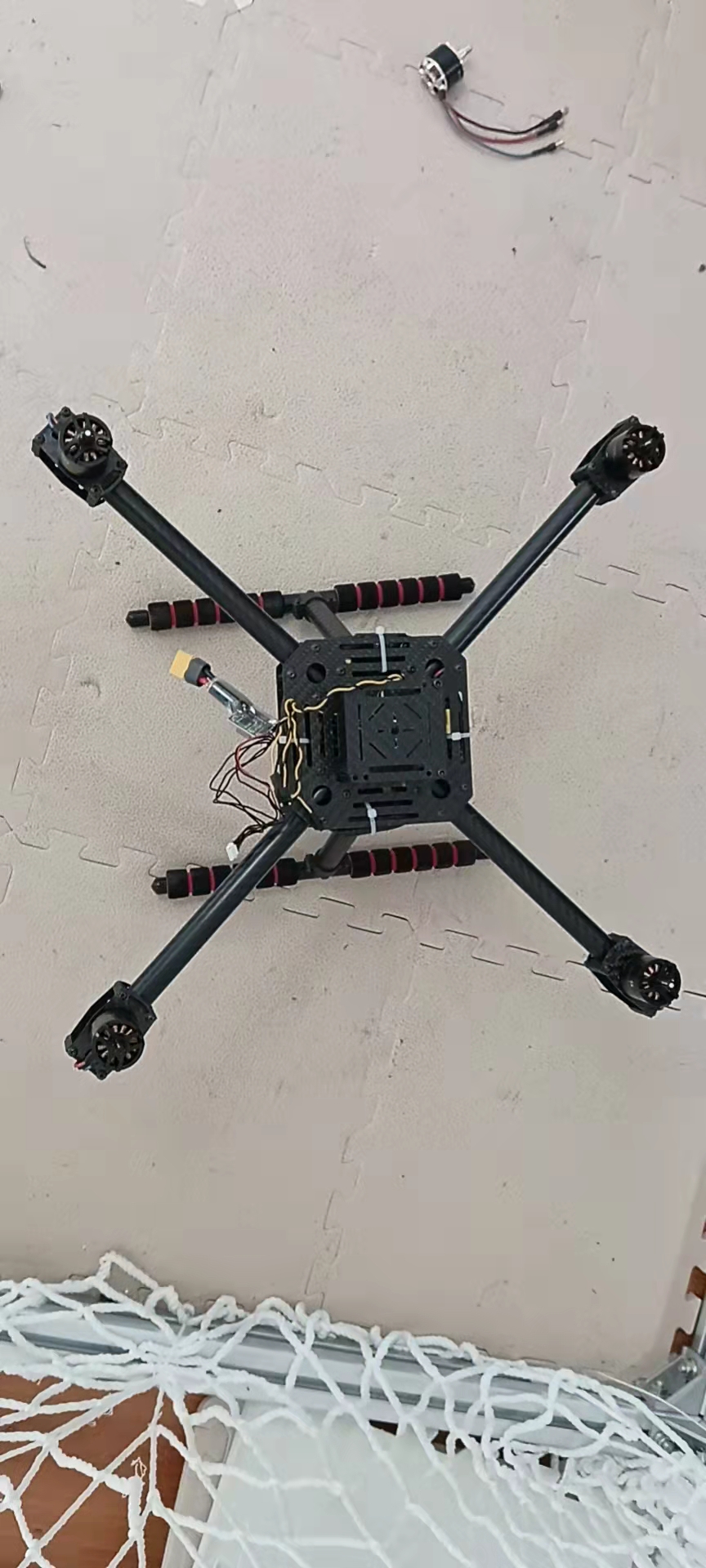
组装好的机架如图:配置为龙翔450机架+T-MOTOR AIR GEAR 450 V2动力套装
一、选择机型
将飞控连接至地面站,将机架设置为Geneic Quadcopter
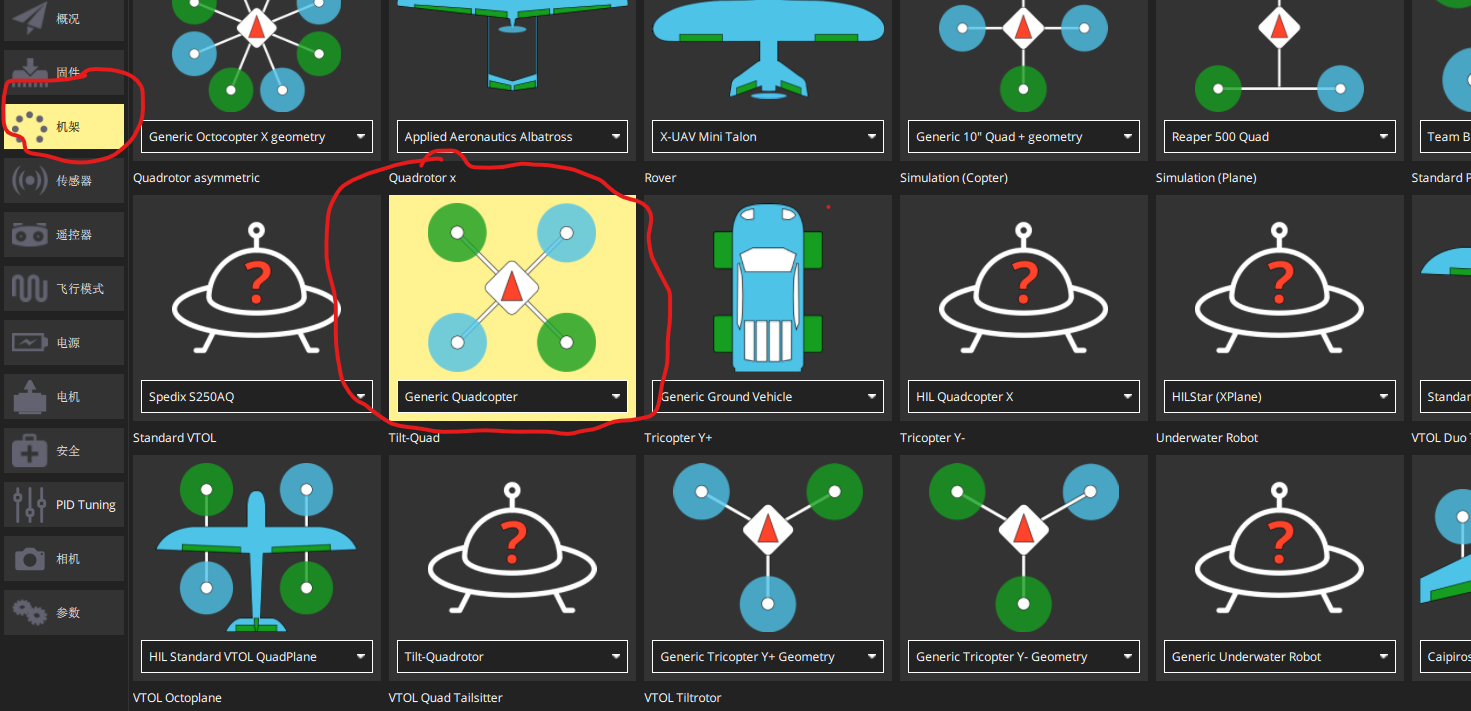
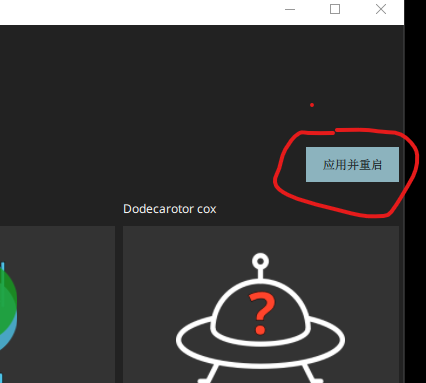
然后电机右上方“应用并重启”
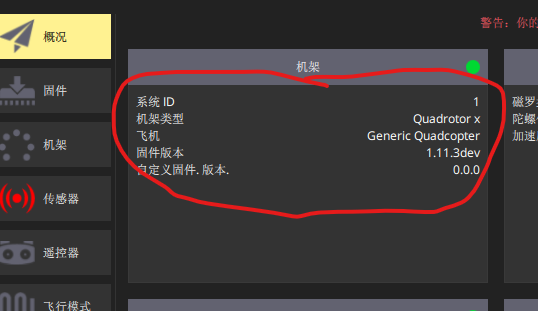
重启后如图:
二、安装
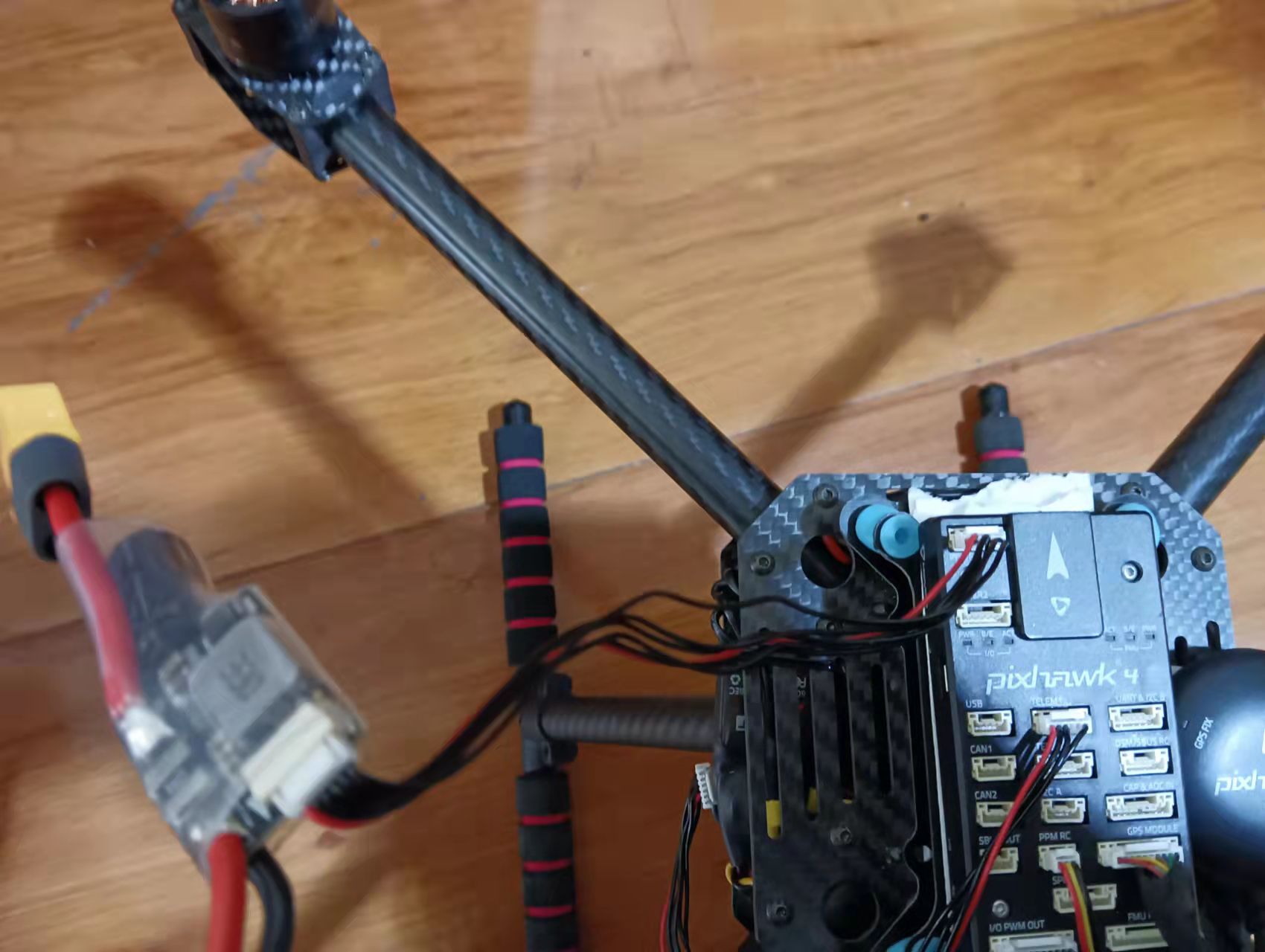
1.安装飞控和GPS
确定机头方向后,即可安装飞控和GPS,飞控和GPS箭头的方向与机头一致.

2.安装电机并接电调
需要注意的是,在安装电机的时候,如果是自锁电机,需要注意电机的正反。
电机的转向及电机接线顺序如下:
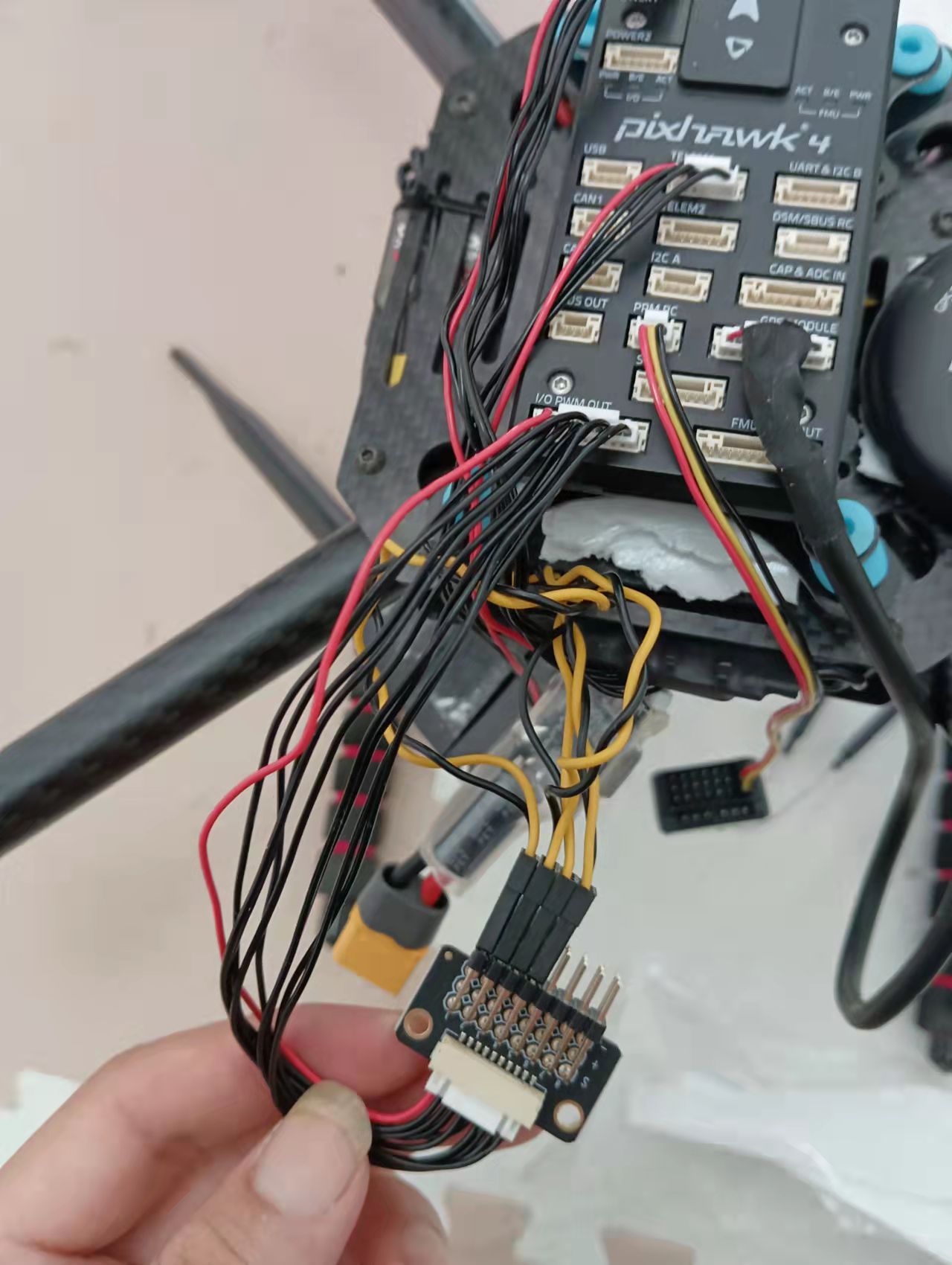
1到4号电机信号线通过转接板接到I/O PWMOUT口的1到4号口.
3.遥控器接收机
我这里使用的是富斯I6S遥控器
遥控器对码
用杜邦线将B/VCC口的VCC和GND短接

然后给接收机上电,此时接收机红灯快闪
然后打开遥控器,点击功能->对码
正常的话遥控器会提示对码成功,接收机变为红灯常亮,表示已经对码成功.
接收机与飞控连接

将接收机的PPM/CH1接到飞控的PPM RC上(不要接到DSM/SBUS RC上,不然识别不到)
遥控器的系统->输出模式->输出设置为PPM

然后打开遥控器,将飞控上电连接到地面站,正常的话可以在地面站上看到遥控器的通道值

设置辅助通道
默认情况下富斯遥控器的辅助通道都是禁用的,也就是说只有四个摇杆的通道是可以识别的,其他的拨码开关等通道是识别不到的,因此需要设置辅助通道
点击功能->辅助通道

如下

点击"无"左边的禁用标志,选择通道类型为开关

设置为相应的拨码开关

通道5就设置完成了,以此类推设置其他通道即可.
如果想设置其他拨码开关就点击SwA,在弹出的提示框选择其他开关.

4.安装数传
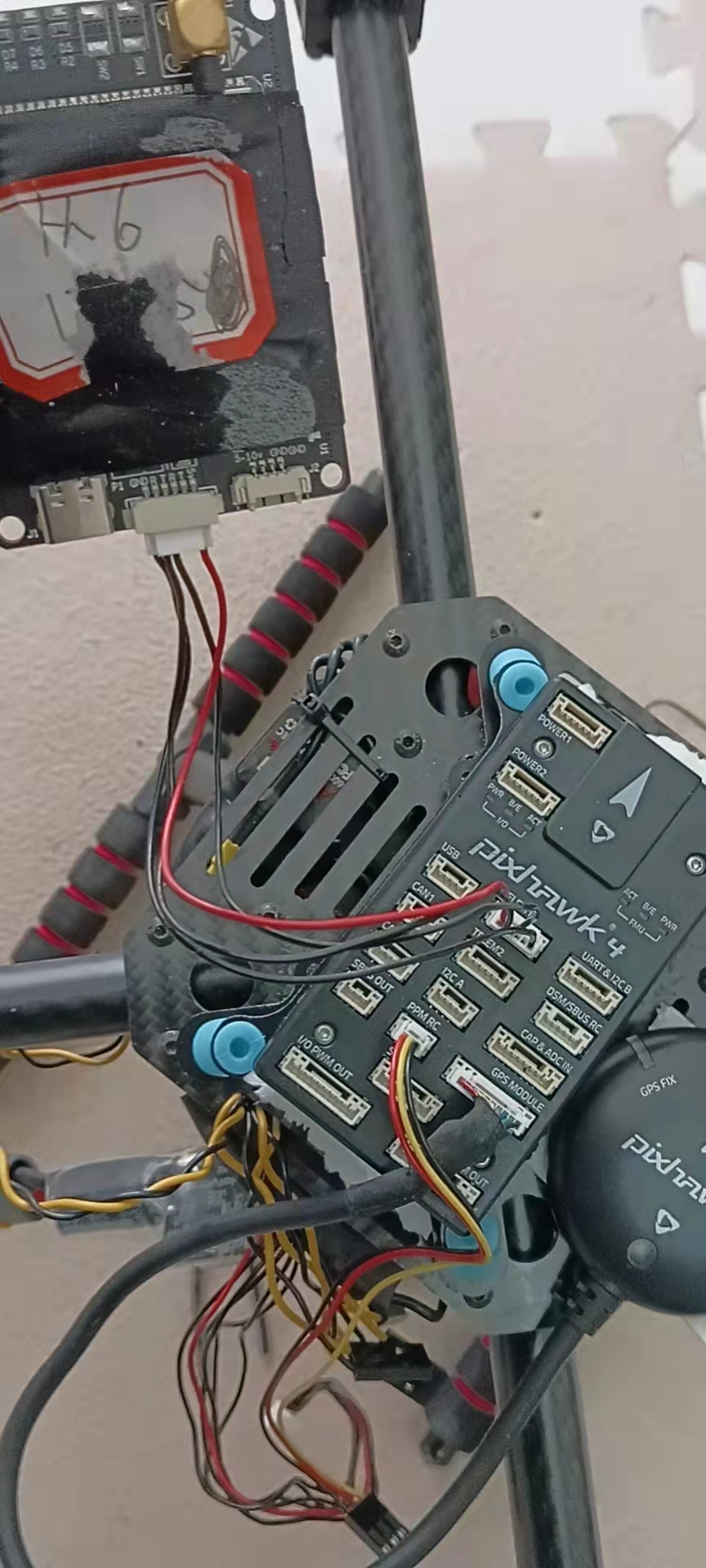
数传直接接到TELEM1接口,根据端口的定义接线,接VCC,TX,RX,GND四根线即可。
5.安装电流计
这里使用PM02电流计,直接接到飞控的POWER2口即可。
三、校准
将飞控通过数传链接QGC地面站
1.校准罗盘
选择传感器->罗盘->确定,开始校准
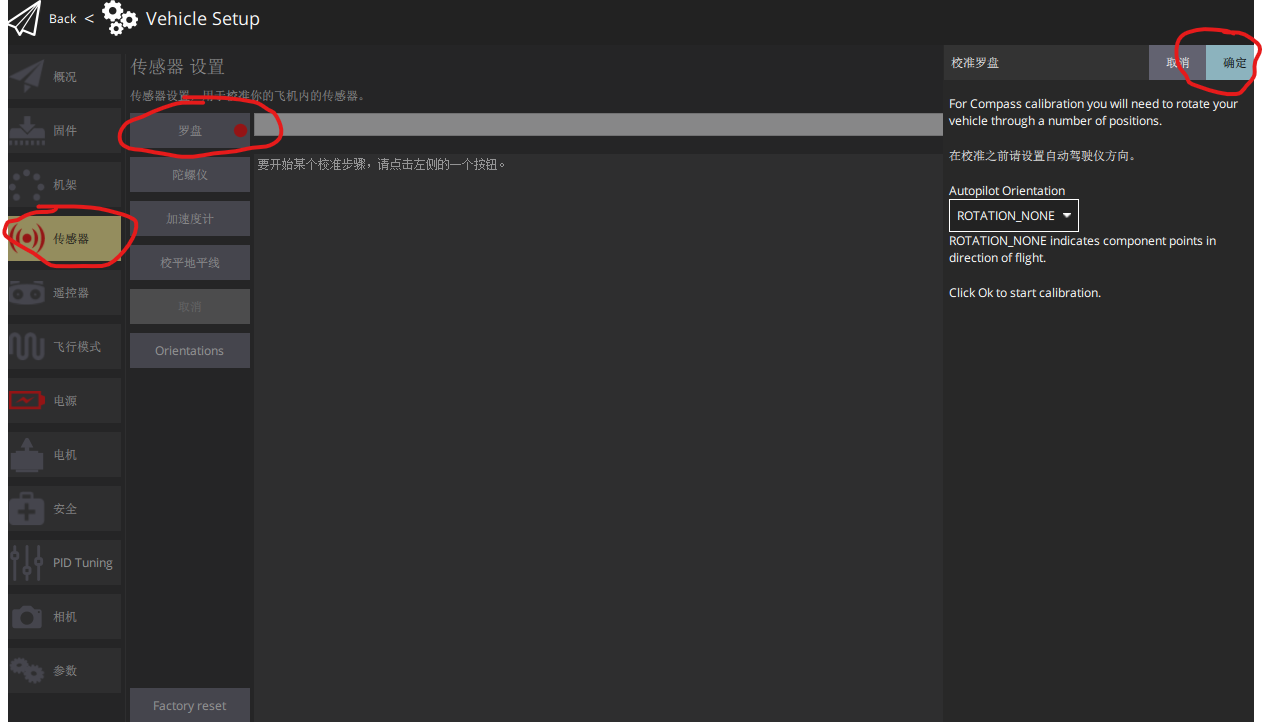
将无人机置于红色所示的任何方向,并保持静止。出现提示后(方向图像变为黄色),沿任意/两个方向绕指定轴旋转车辆。当前方向校准完成后,屏幕上的相关图像将变为绿色。
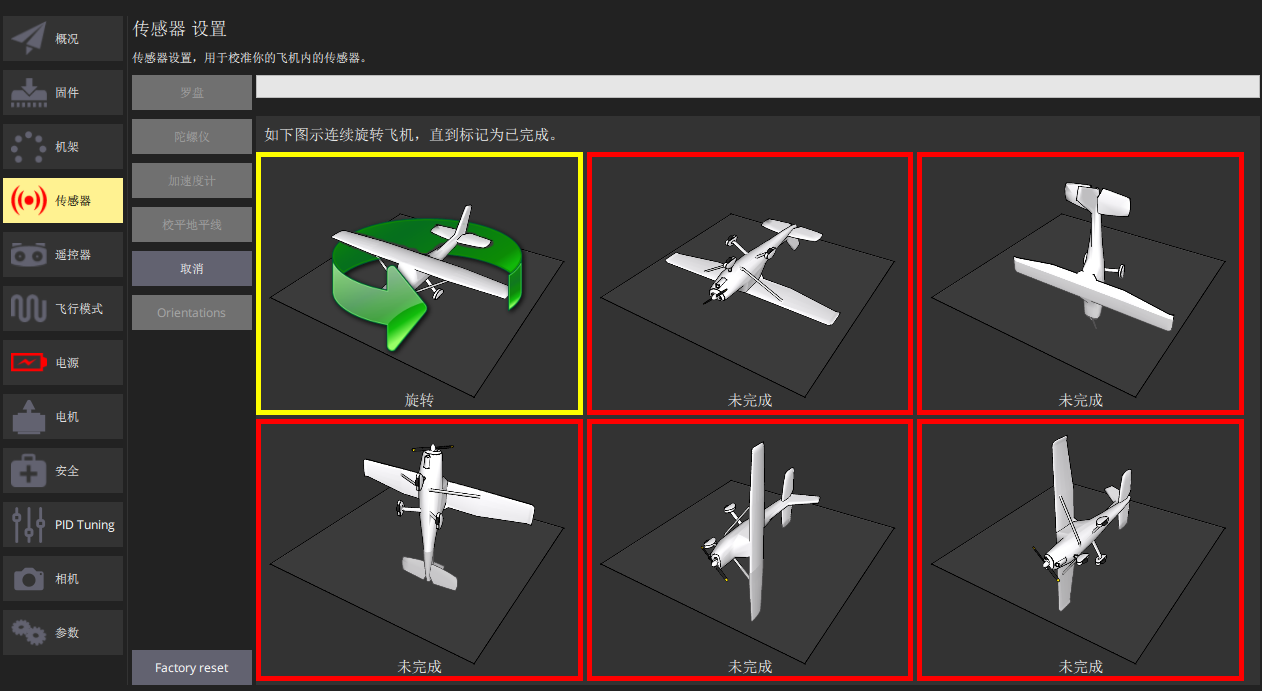
对所有方向重复校准过程。
在所有方向校准完毕后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。然后可以继续下一个传感器。

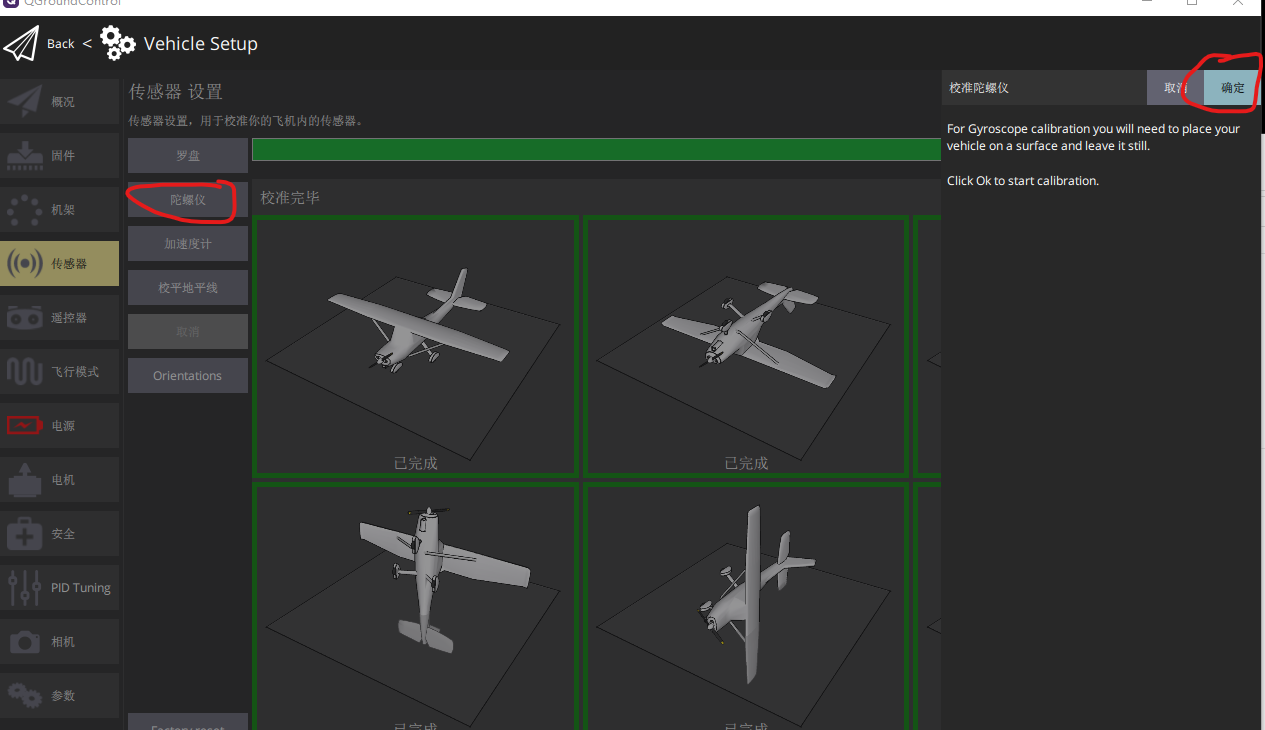
2.校准陀螺仪
单击陀螺仪传感器按钮,将无人机水平放在地面上,保持静止。单击“确定”开始校准。顶部的条形图满代表校准成功
3.校准加速度计
单击加速计传感器按钮,单击“确定”开始校准。
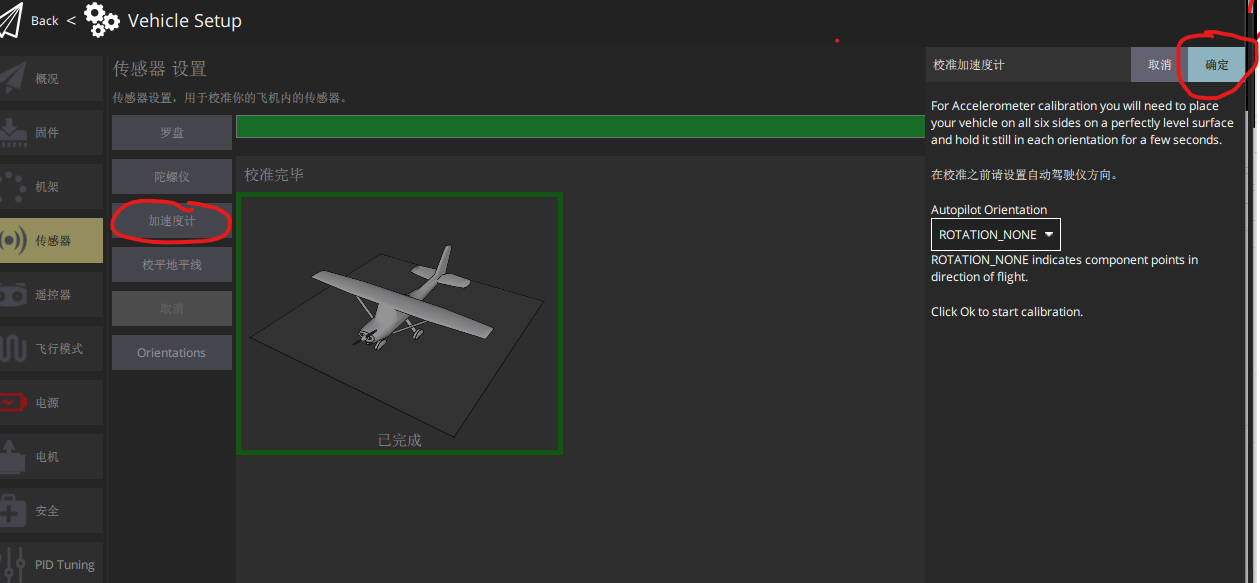
根据屏幕上的方向提示,当方向图像变为黄色,保持无人机静止。当前方向校准完成后,屏幕上的相关图像将变为绿色。

对所有向重复校准过程。在所有位置校准车辆后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。
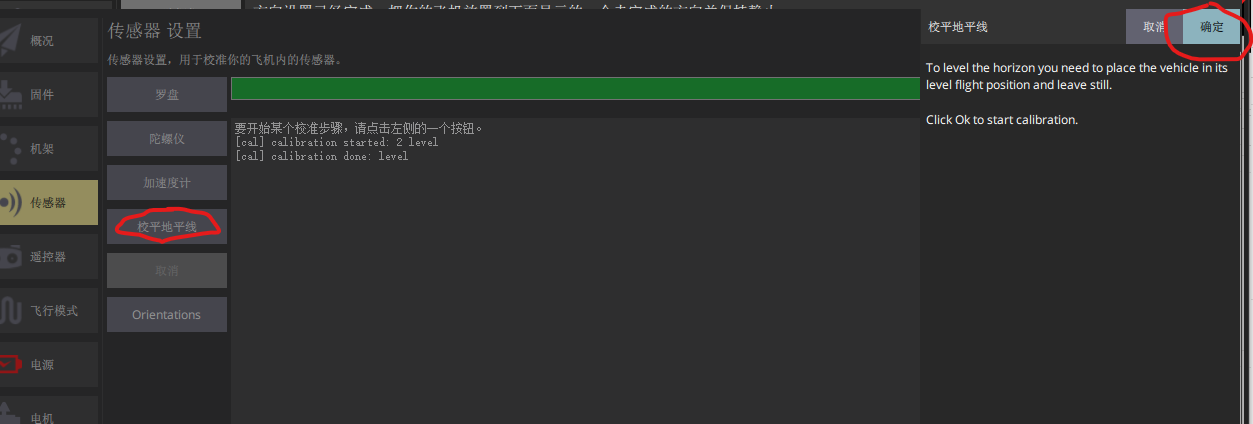
4.校准地平线
如果不校准地平线,无人机在非定点飞行中位置可能持续的漂移。
将无人机置于水平面上,点击校平地平线->OK,然后保持静止,直到绿色进度条满
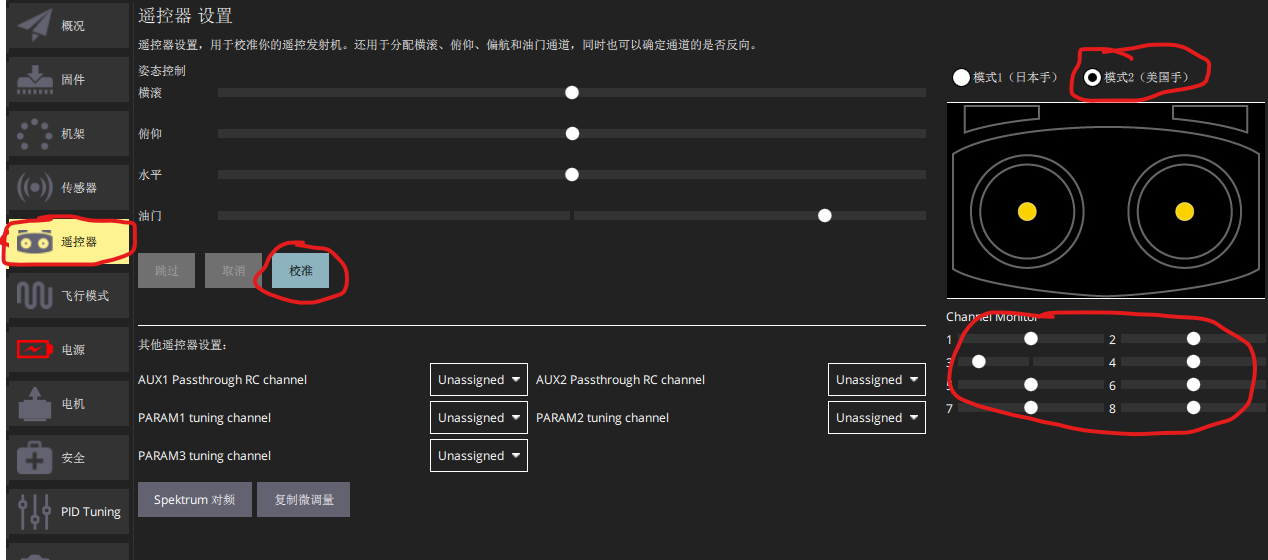
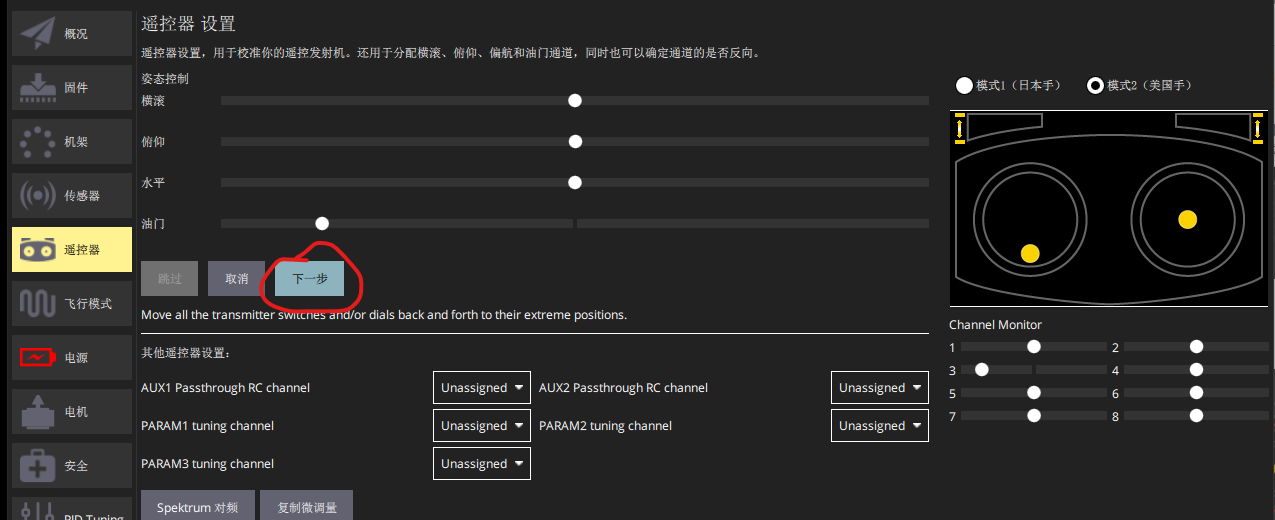
5.校准遥控器
切换到遥控器页面,检查右下角是否能识别到通道,如果能识别到通道,就可以进行校准,选择右上角的操作方式,然后点击校准
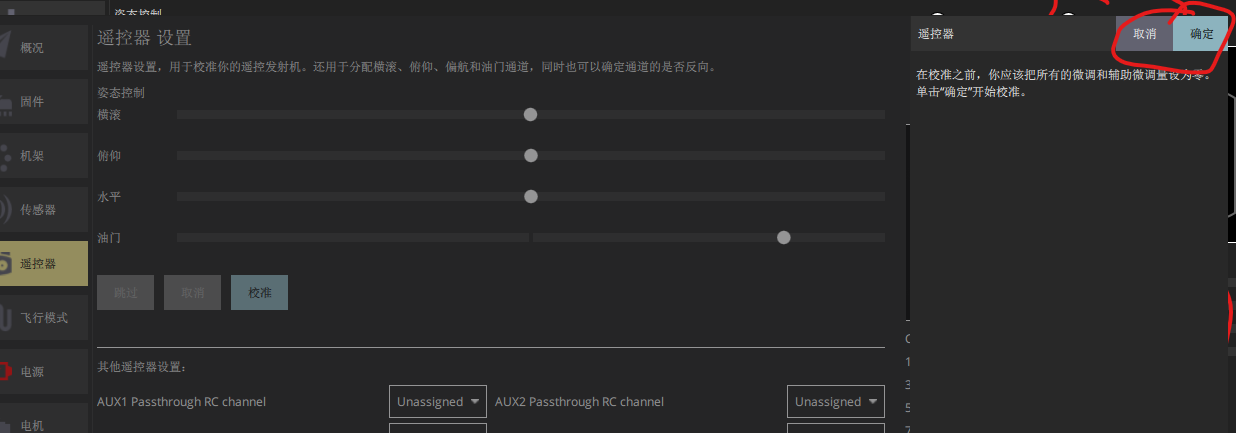
然后点击“确定”
再点击“下一步”
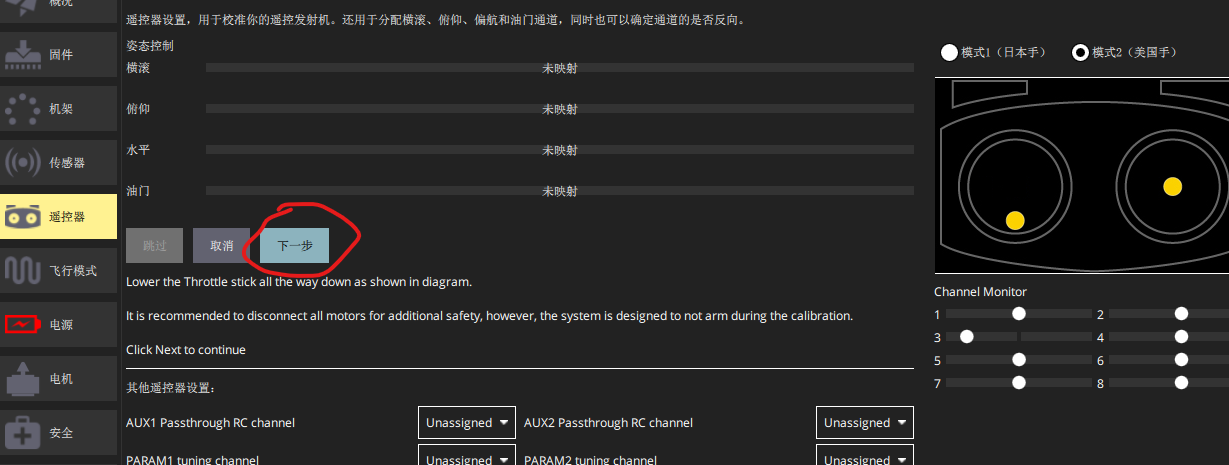
将遥控器摇杆移动到下图中指示的位置。

当杆就位时,地面站会提示下一个需要拨的位置,拨完所有位置后,按两次“下一步”保存设置。
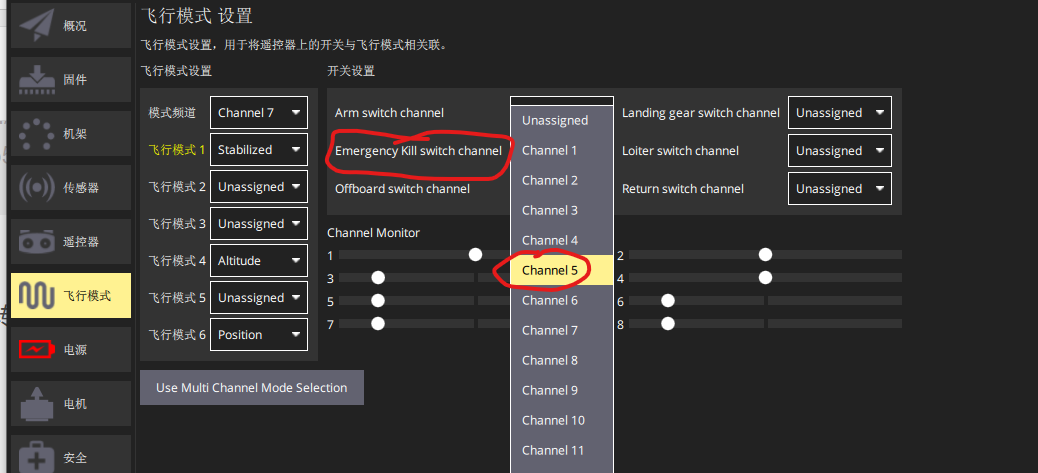
5.设置遥控器拨码开关
切换到飞行模式页面,可以先拨一下需要设置的遥控器拨码开关,看其在地面站中对应的是哪个通道。
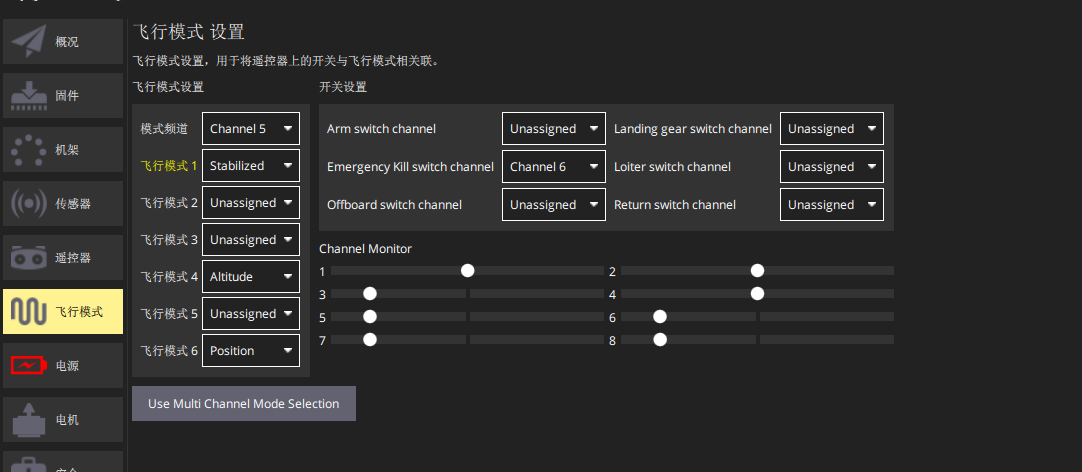
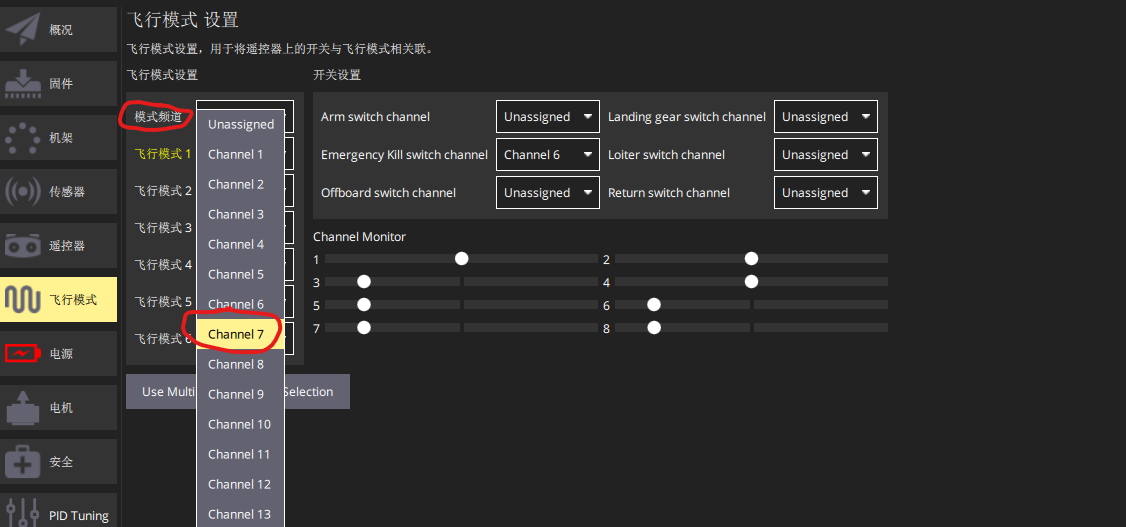
设置飞行模式切换开关
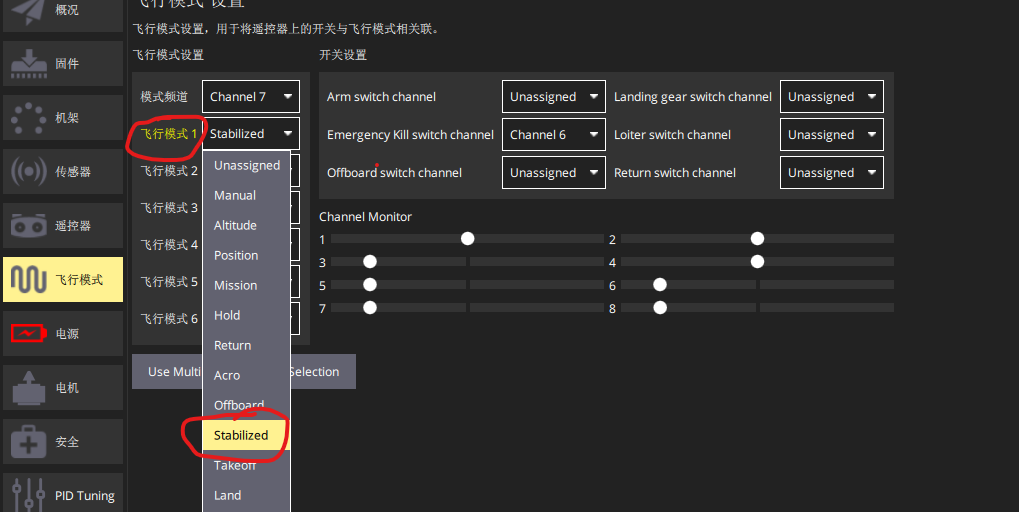
点击“模式频道”右侧的复选框,设置相应的遥控器拨码开关通道。
然后分别设置三档对应的飞行模式。
设置其他切换开关
其他的开关通道在飞行模式右侧,如下,需要设置哪个,就把这个开关右侧的遥控器通道进行设置即可,我这里设置了一个刹车(Kill switch),通道为遥控器的第五个通道。刹车的作用是使电机直接停转,可根据需要进行设置
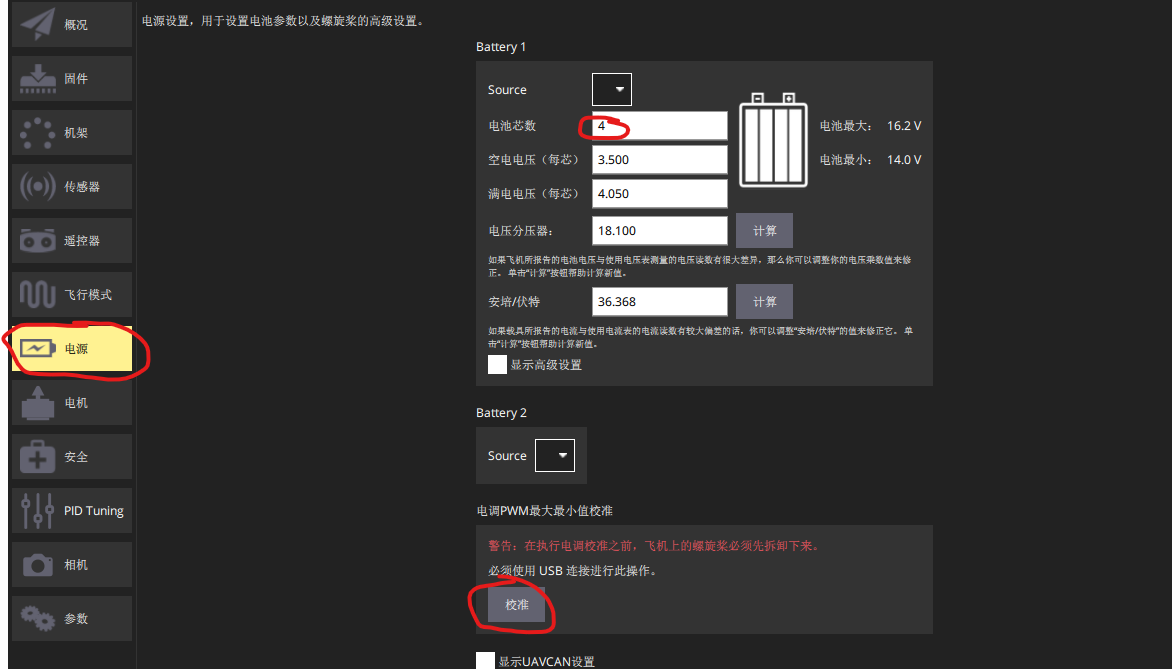
6.校准电调
校准电调时,用USB将飞控连接到地面站,不接电池,不装浆叶,电调的信号线接到飞控上。
切换到“电源”页面,输入电池芯数并回车,点击“校准”,然后插上电池即可校准。
7.调整电机转向
所有的都校准完毕后,接上电池,解锁安全开关,遥控器油门最低,偏航最右解锁无人机,检查电机转向是否和下图一致,如果不一致,将电调与电机的三根连接线的任意两根互换顺序即可调整转向。
四 250穿越机组装。
硬件:图腾Q250机架,乾丰51477桨叶,格氏tattu 4s2300mah电池,TMOTOR F60PRO 四代KV2550电机,EMAX银燕45A BLHELI32方程式系列电调。
飞控:PIXHAWK4,固件PX4 1.11.3或者CUAV NORA+ ,固件PX4 1.12.3测试正常,其他的应该也都可以。
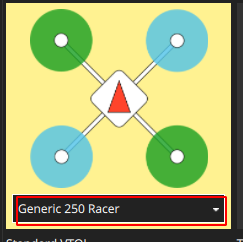
选择机架为Generic 250 Racer:
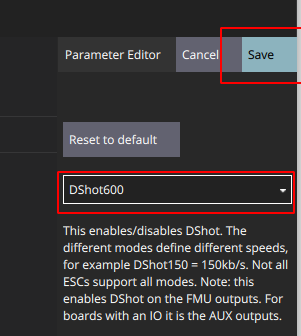
设置DSHOT_CONFIG参数为:Dshot1200,注意不要设置为PWM,否则遥控器打开后电机会时不时的自己转。
搜索SYS_USE_IO参数,禁用协处理器,如果有该参数,就置为0,然后将电调信号线接至FMU/AUX通道。如果没有该参数,则将电调信号线接至MAIN通道。
由于用的是Dshot协议,电调不用校准,将CBRK_SUPPLY_CHK置为894281。
如果想使电调的转向反向,可以在mavlink控制台上输入u以下命令:
以1号电机为例。
dshot reverse -m 1
dshot save -m 1
然后校准传感器和遥控器这些操作和450无人机相同,弄完即可解锁起飞。
注意NORA+飞控(或者X7飞控),需要将原装的电流计接到POWER C接口才能显示电压和耗电量,接POWER A无法显示电压和耗电量,同时还在QGroundControl参数列表中设置以下参数并在写入后重启:Uavcan_enble设置为sensors Automatic config(自动配置)
五 四轴8旋翼(X8)组装
X8无人机的机架类型如下

我用的是龙翔350四旋翼机架,朗下2212电机,好盈乐天20A电调,4S电池,8045桨叶。安装的时候每个轴上下装两个电机即可,电机的转向参考上图,电调的信号线接IO的1到8,其他的和四旋翼一样。




















 3915
3915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











