







前言
飞控:CUAV NORA+
固件:PX4 1.12.3
地面站:QGC
机架:淘宝倾转机架(精翼VTBIRD)
8.2垂起固定翼硬件平台搭建与调参
一、设置飞控
设置机型
在地面站上设置机型为Generic Quadplane VTOL Tiltrotor,然后点击应用并重启
然后就是校准传感器,如果装飞机上不好校准的话,可以先拿着飞控和罗盘校准完了之后再装上去,校准的时候飞控和罗盘方向一致。如果没有装空速计的话,需要把空速计禁用,将CBRK_AIRSPD_CHK设置为162128

需要设置一个垂起切换的通道

二、修改混控
上一节中设置的机架类型是四个电机都倾斜转的,倾斜转的四个舵机加上两个副翼,一个升降舵,一个方向舵共占用了八个辅助通道,而本文中采用的机架只有前面两个电机倾转,而且本文中采用的飞控只有6个辅助通道(如果使用的PIXHAWK4这种有8个辅助通道的飞控可以不用修改混控,后面两个电机的倾转信号线不接即可),所以在混控中将后面两个电机的倾转输出去掉。
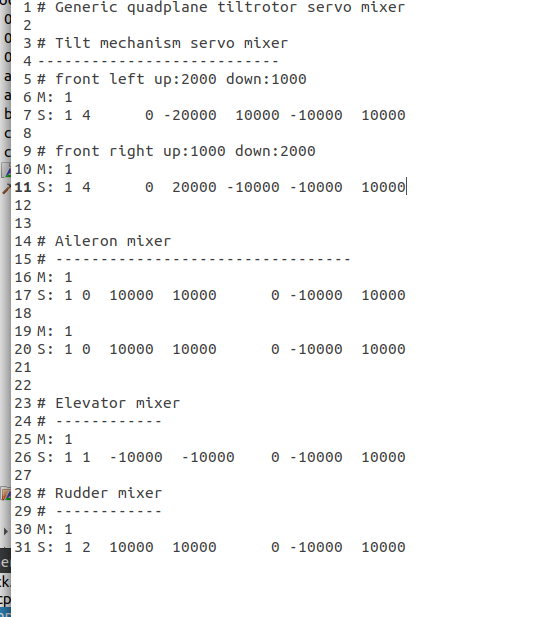
打开Firmware/ROMFS/px4fmu_common/mixers/vtol_TTTTAAER.aux.mix
将下面的内容删除
# rear left up:2000 down:1000
M: 1
S: 1 4 0 -20000 10000 -10000 10000
# rear right up:1000 down:2000
M: 1
S: 1 4 0 20000 -10000 -10000 10000
删除后如下
保存重新编译下载到飞控。
三、接线
四个电机的信号线接线同四旋翼,电机的转向也同四旋翼,接在飞控的M1~M4通道。参考
https://mbot1.blog.csdn.net/article/details/123156744
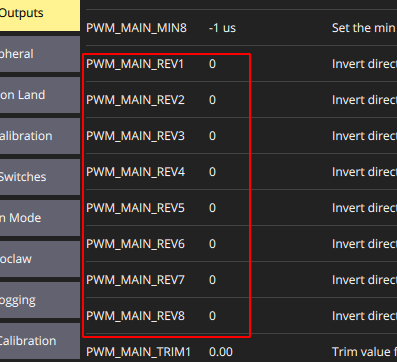
左边的倾转舵机接M9(有IO芯片的对应FMU/AUX通道1),右边的倾转舵机接M10(有IO芯片的对应FMU/AUX通道2),左副翼舵机接M11(有IO芯片,没改混控的话,接FMU/AUX通道5),右副翼舵机接M12(有IO芯片,没改混控的话,接FMU/AUX通道6),升降舵舵机接M13(有IO芯片,没改混控的话,接FMU/AUX通道7),方向舵舵机接M14(有IO芯片,没改混控的话,接FMU/AUX通道8),接完之后,查看舵机正反,如果反掉的话,可以修改PWM输出使其反向


















 5533
5533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











