







前言
固件:rover 4.2.3
地面站:独家汉化版QGC
一、校准加速度计
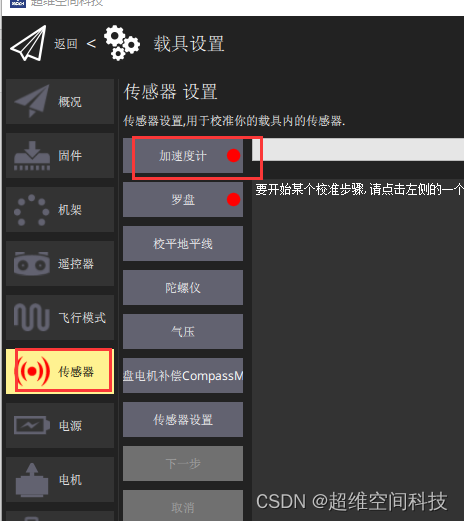
点击左上角软件图标-》载具设置-》传感器-》加速度计
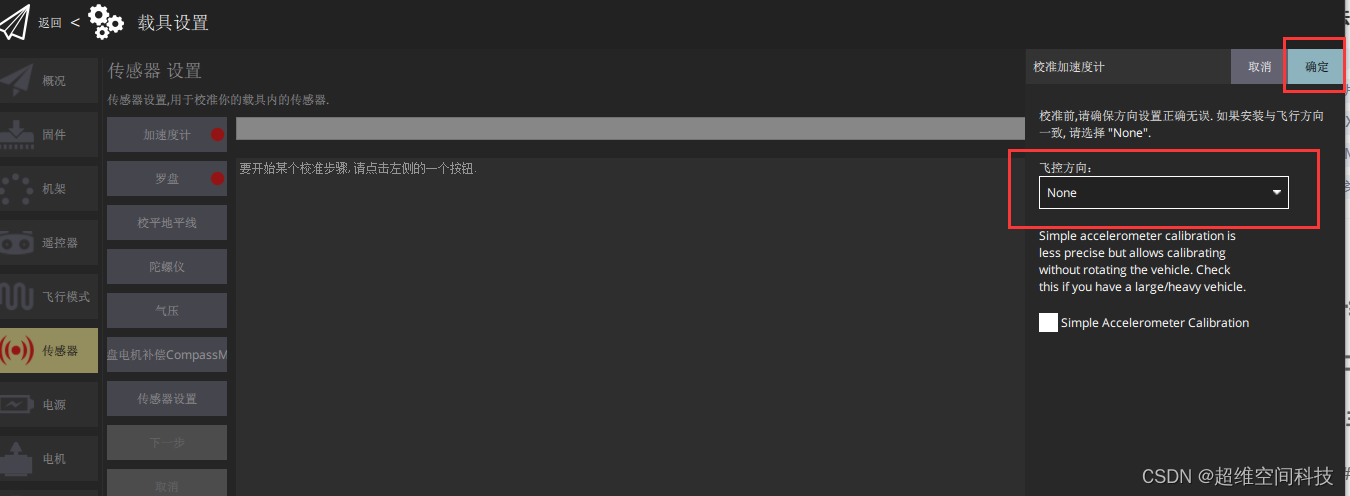
飞控方向默认为None即可,点击确定
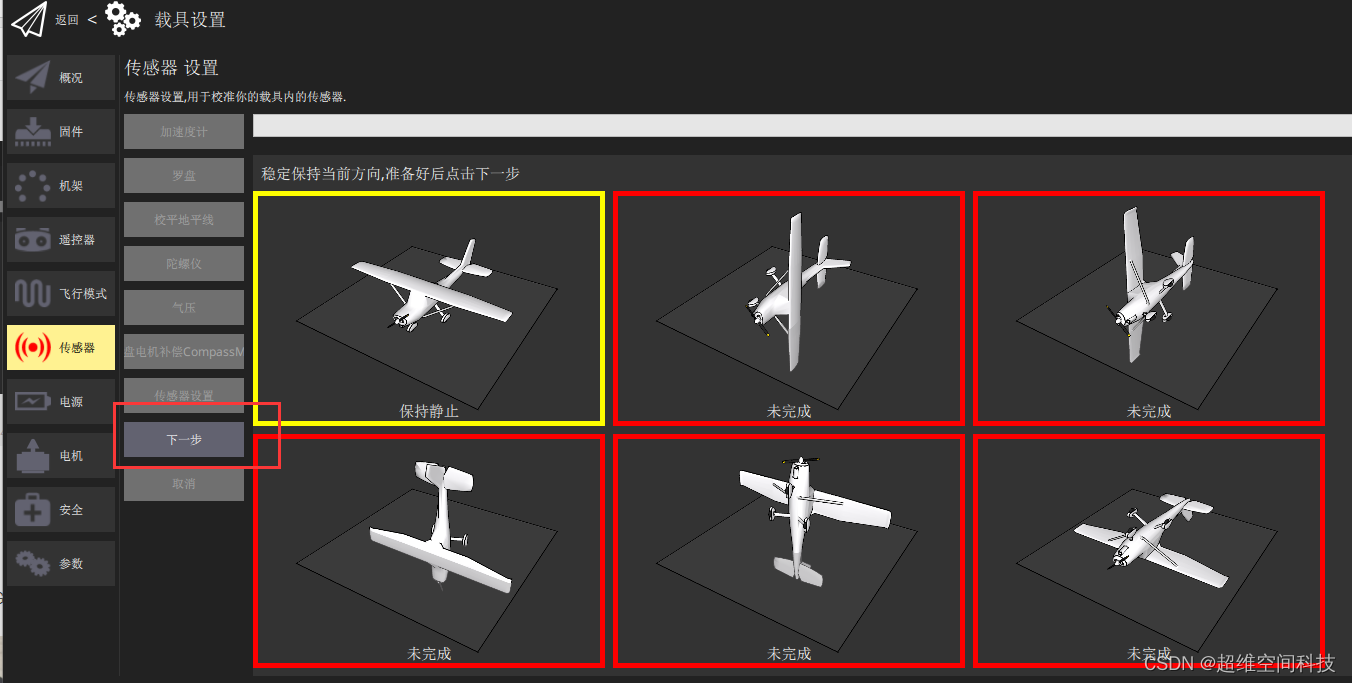
点击确定后,地面的水平面图标会变成黄色,此时将飞控保持水平静止。然后点击下一步。
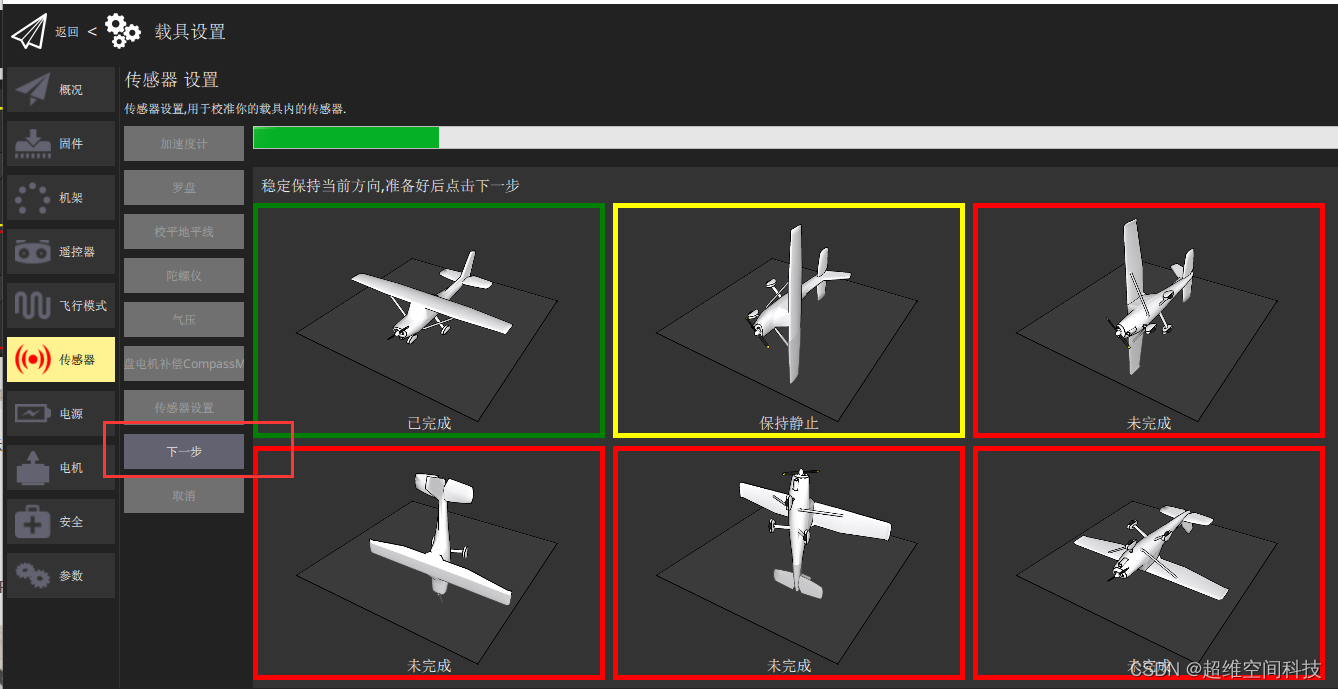
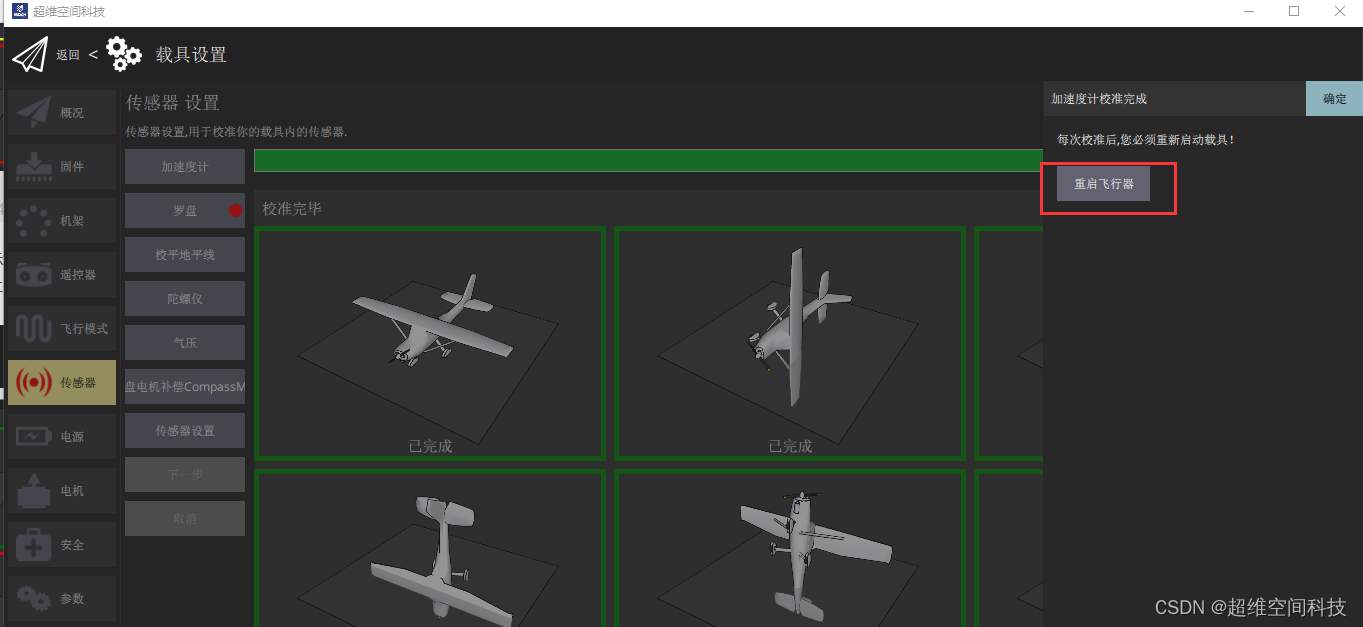
点击完后水平面图标会变成绿色,表示水平面已校准完成。同时地面站的另一个面会变成黄色,然后再将飞控保持根据提示的面保持静止并点击下一步即可,直到六个面都教程完成、
都校准完后,会提示重启飞行器,点击重启即可。
二、校准罗盘
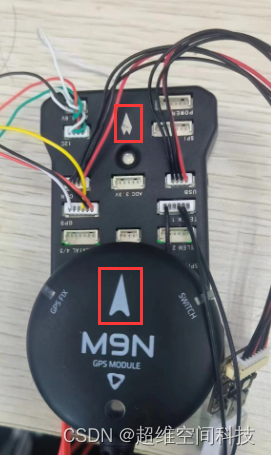
校准罗盘前,确保飞控罗盘的方向与GPS罗盘的方向一致
点击左上角软件图标-》载具设置-》传感器-》罗盘
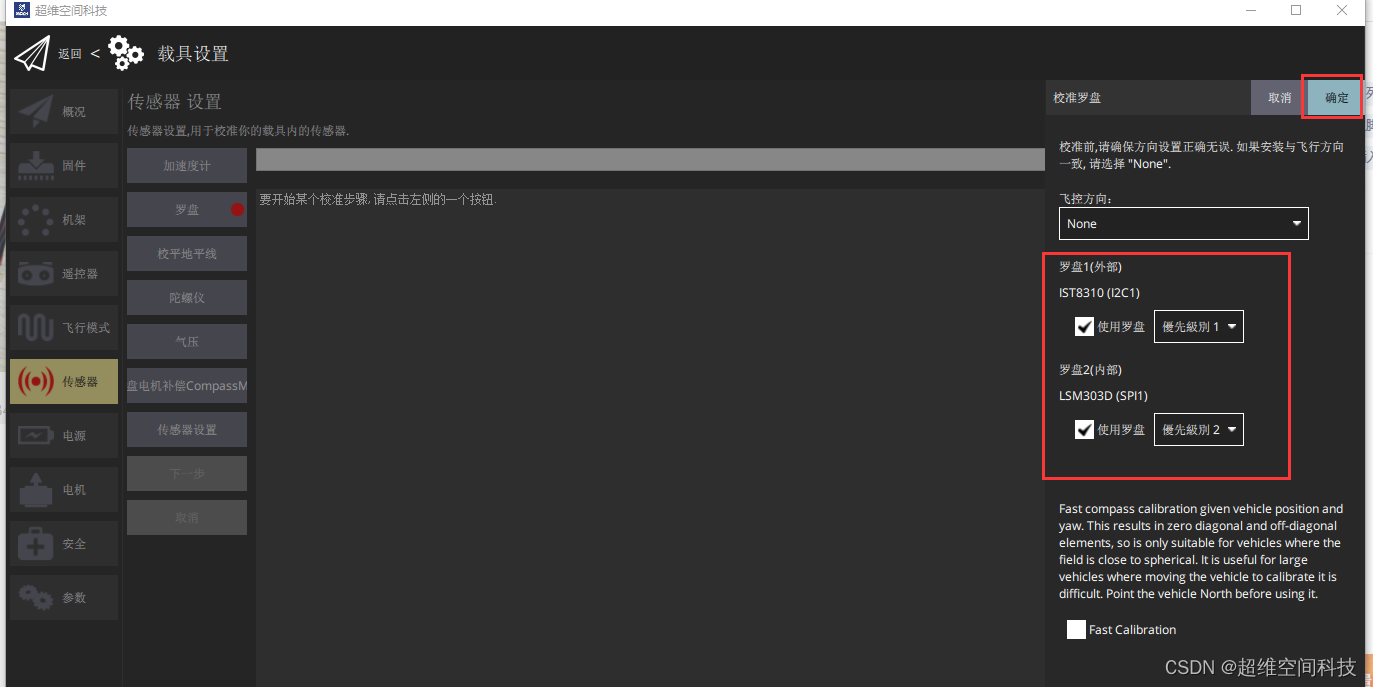
会出现下面提示,设置罗盘优先级,一般设置外置罗盘的优先级为最高,然后点击确定
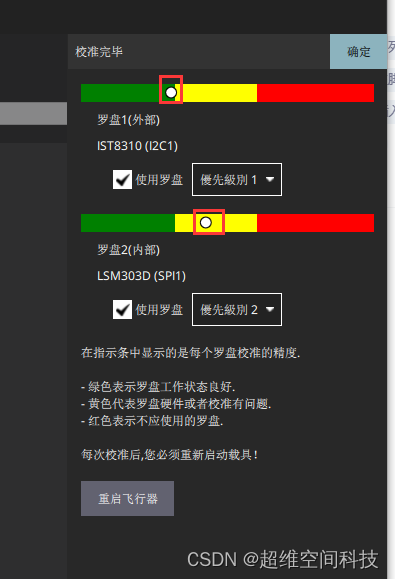
然后往各个方向不断的旋转飞控,直到上方绿色进度条满即可。校准完成后,会弹出下面的提示
如果有罗盘的精度在红色区域,需要将其禁用。没问题的话重启飞行器即可。
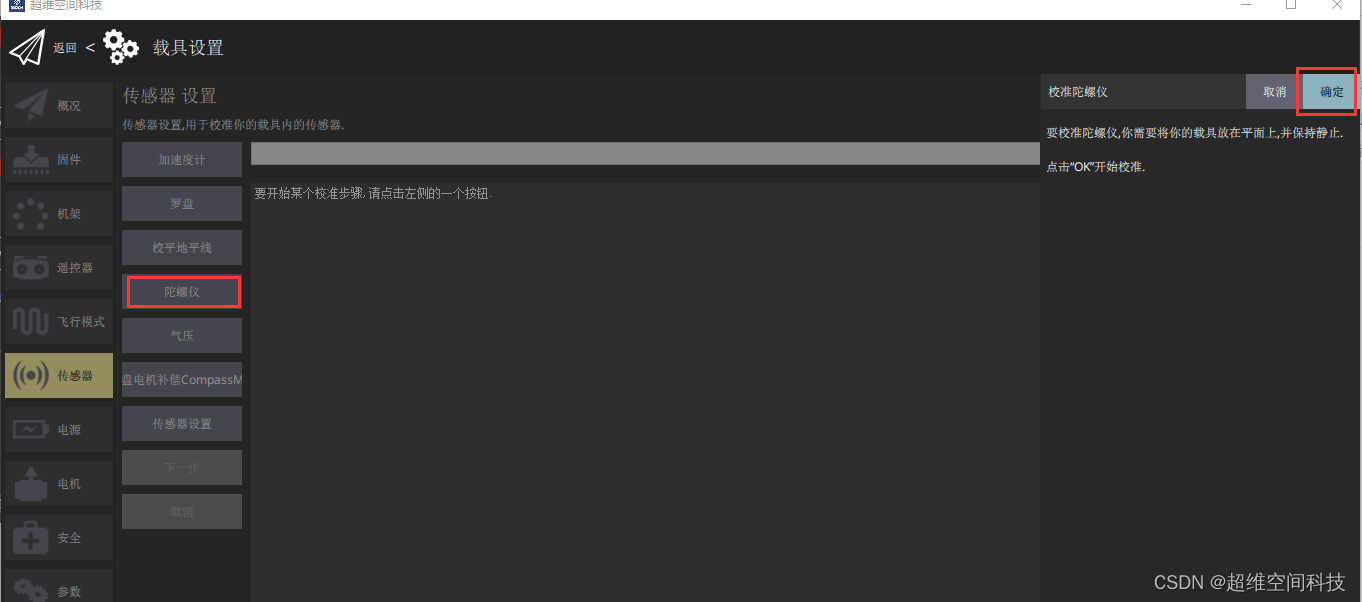
三、校准陀螺仪
点击左上角软件图标-》载具设置-》传感器-》陀螺仪
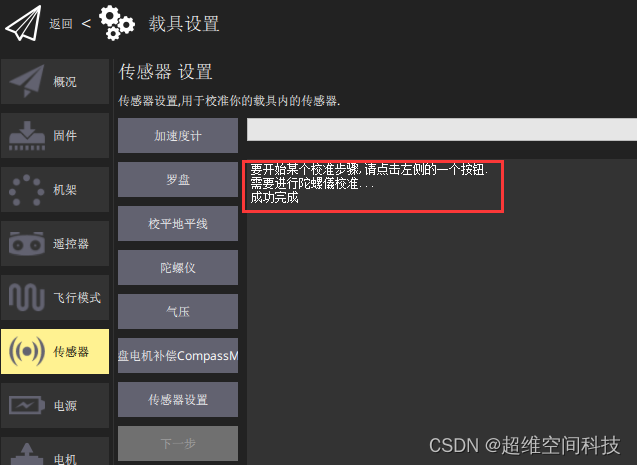
出现下面的提示就表示校准完成
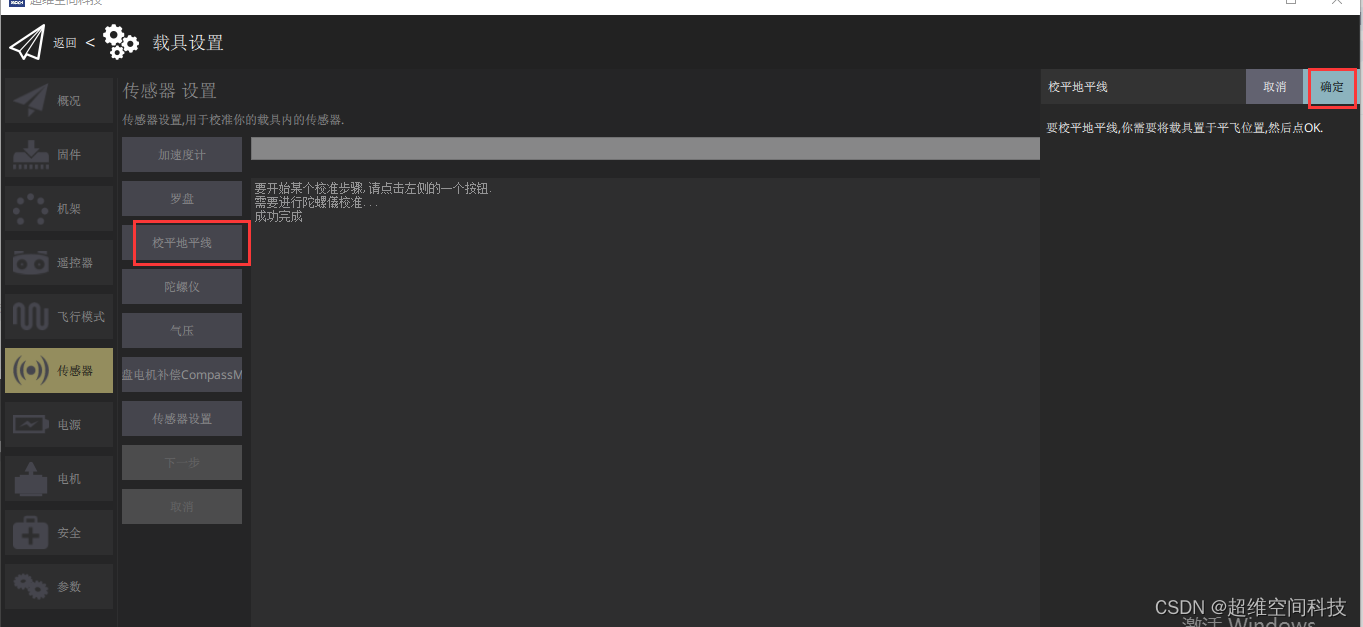
四、校平地平线
点击左上角软件图标-》载具设置-》传感器-》校平地平线
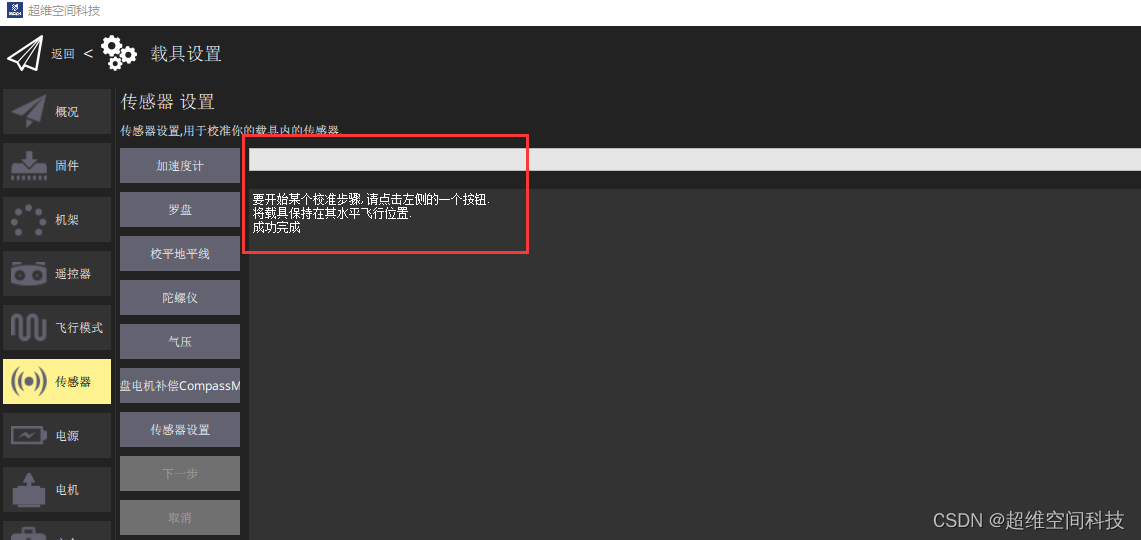
出现下面的提示就表示校准完成


















 476
476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











