









写在前面
1、本文内容
使用vscode单步调试A-LOAM源码
2、平台
ubuntu1804, ros melodic, vscode, vscode ros插件
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/125656531
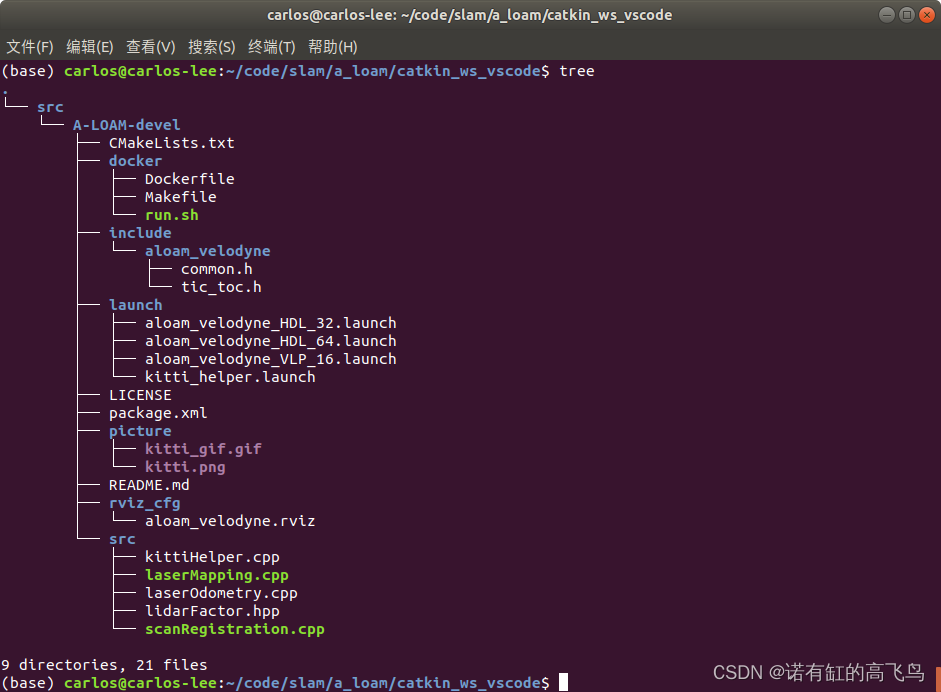
源码
mkdir catkin_ws_vscode
cd catkin_ws_vscode
mkdir src
https://github.com/HKUST-Aerial-Robotics/A-LOAM
将源码放在src
先编译一下,后面打开vscode才会自动生成c_cpp_properties.json
catkin_make
vscode
打开目录catkin_ws_vscode
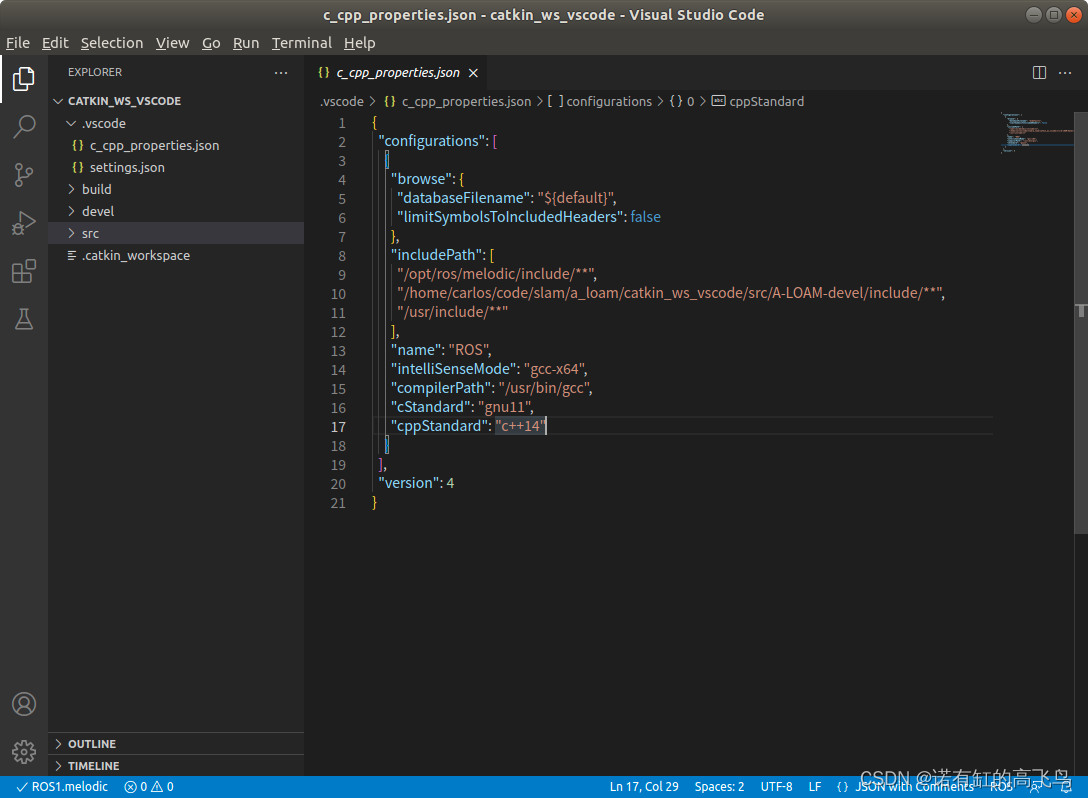
在.vscode下自动生成了c_cpp_properties.json
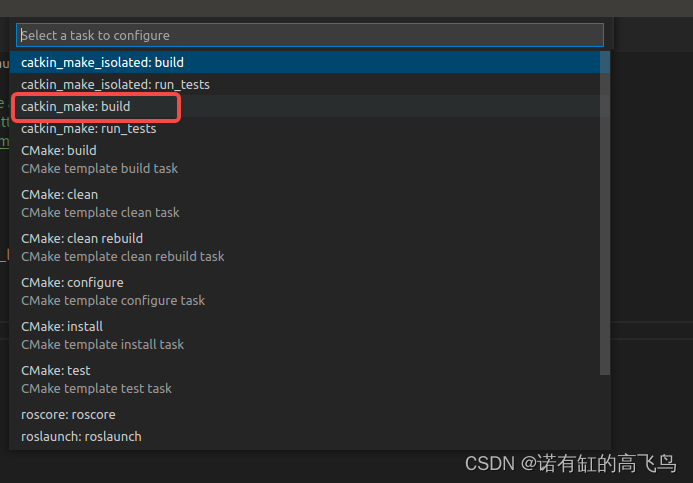
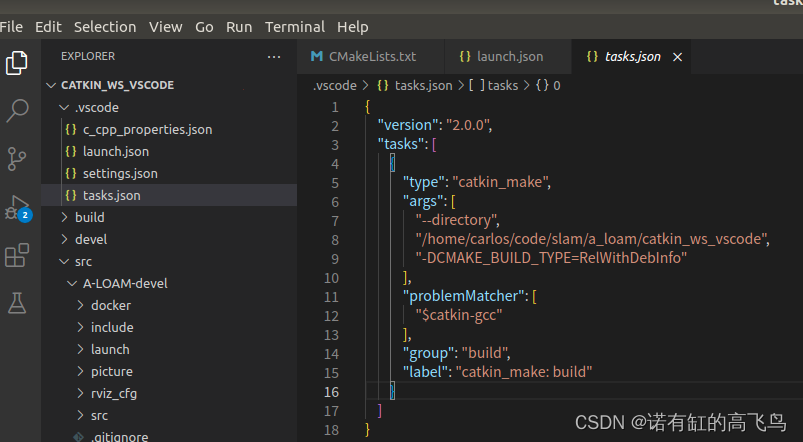
配置task
terminal–configure tasks
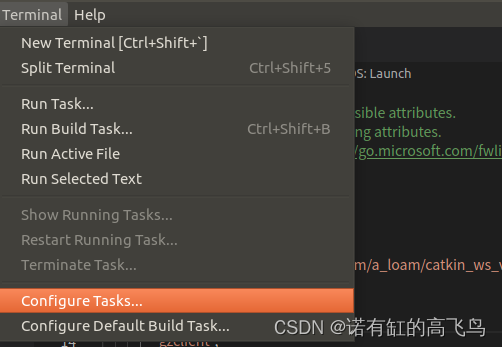
选择catkin_make: build
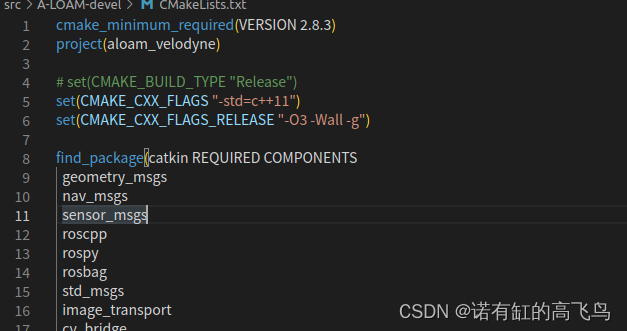
将/src/A-LOAM-devel/CMakeLists.txt里面的Release注释
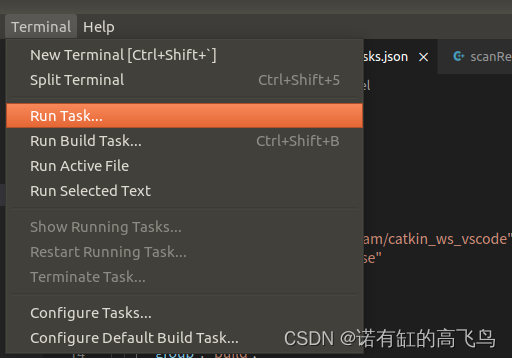
run task或者ctrl+shift+B启动编译
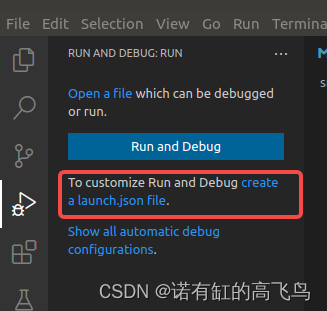
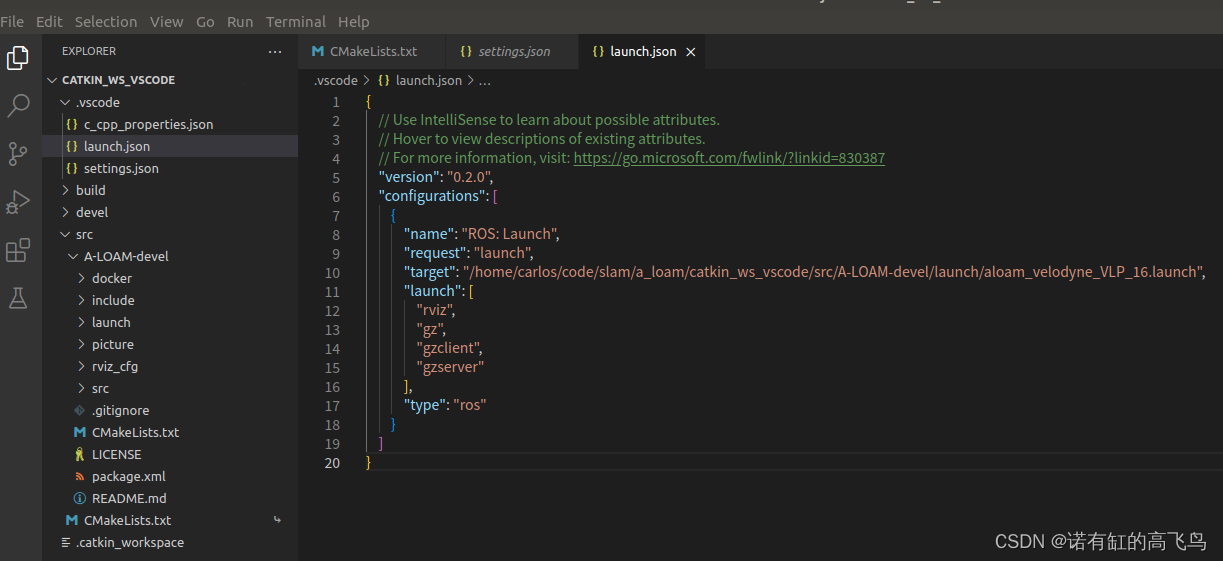
配置launch
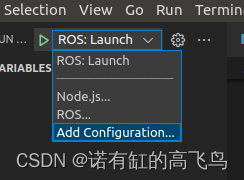
在debug里面选择create a launch.json file
选择ros
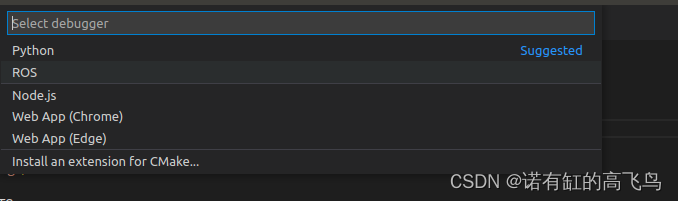
ros::launch

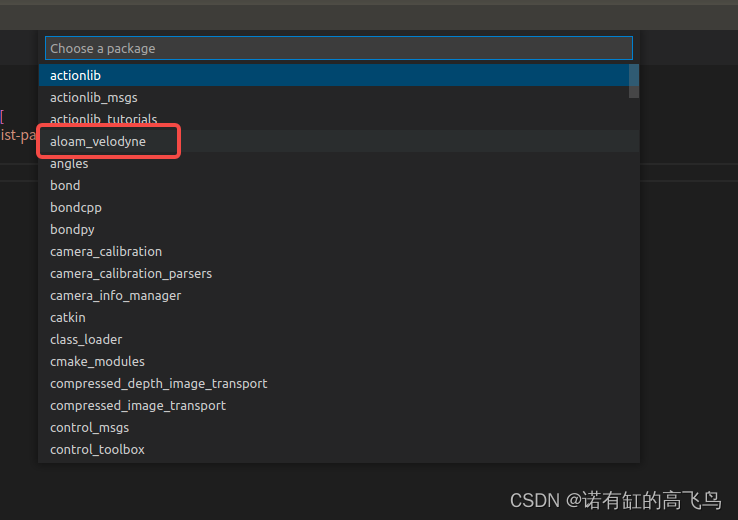
aloam_velodyne
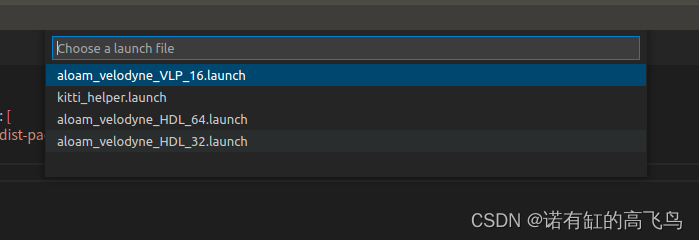
创建好的launch.json,如果有问题,可以删除此文件,再重新创建
debug
在代码中设置断点,这里在scanRegistration中设置
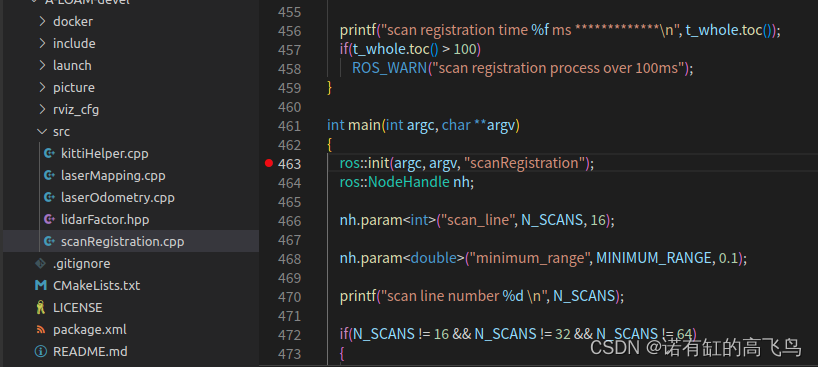
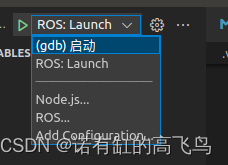
点击绿色三角形或者F5开始调试
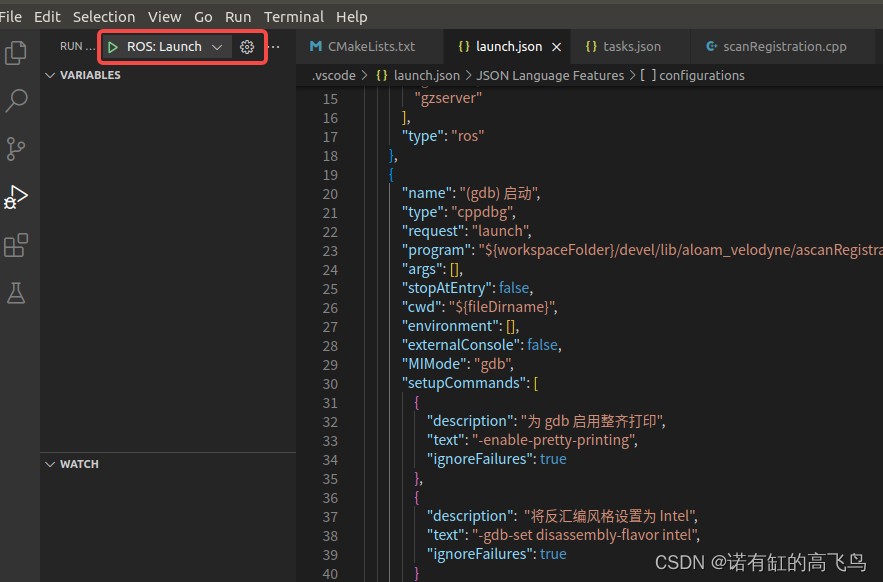
三个节点都已经被启动调试,并且ascanRegistration运行至断点处
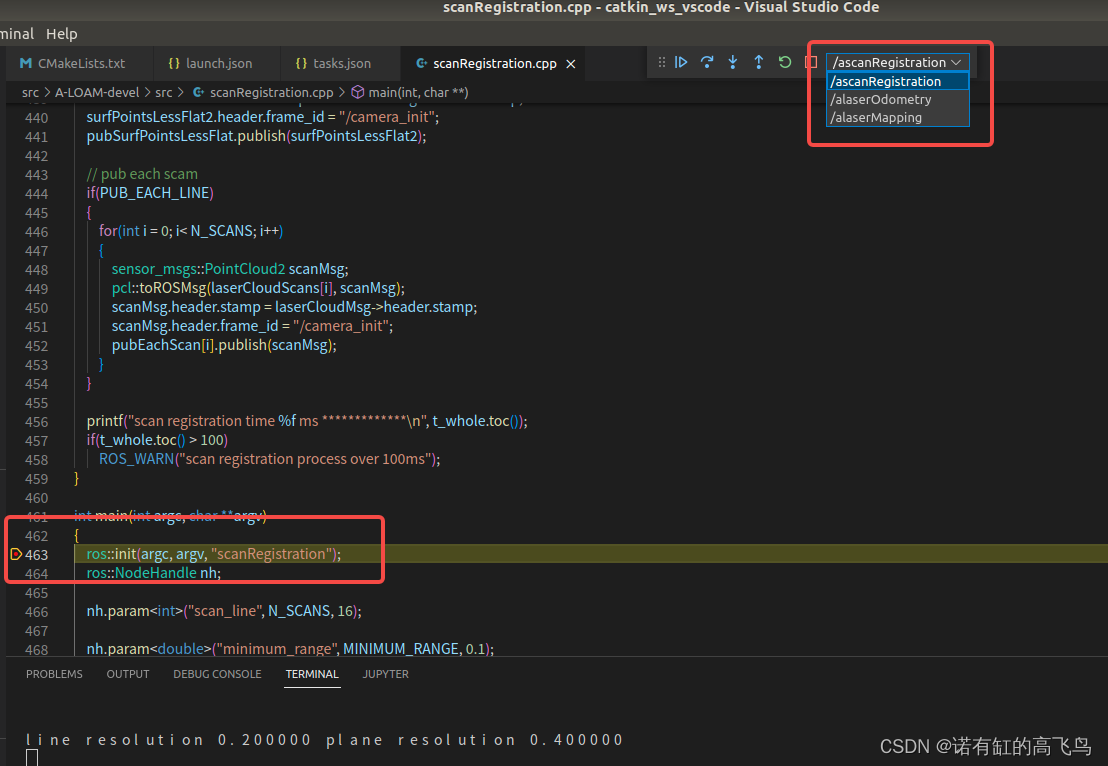
单个节点调试
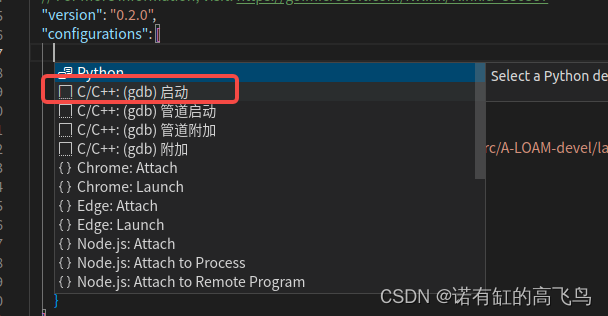

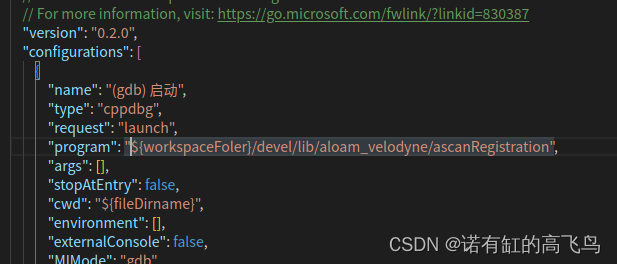
将program更改为程序的路径
${workspaceFoler}/devel/lib/aloam_velodyne/ascanRegistration
同样进入断点
参考
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试https://blog.csdn.net/lyh458/article/details/115711357
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------诺有缸的高飞鸟202206

















 944
944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











