










QGC上是可以对PX4进行在线调参的,也就是在无人机飞的时候修改PID参数,实时观察效果。
2021.4.24 现在知道QGC也可以滑动调参!!!
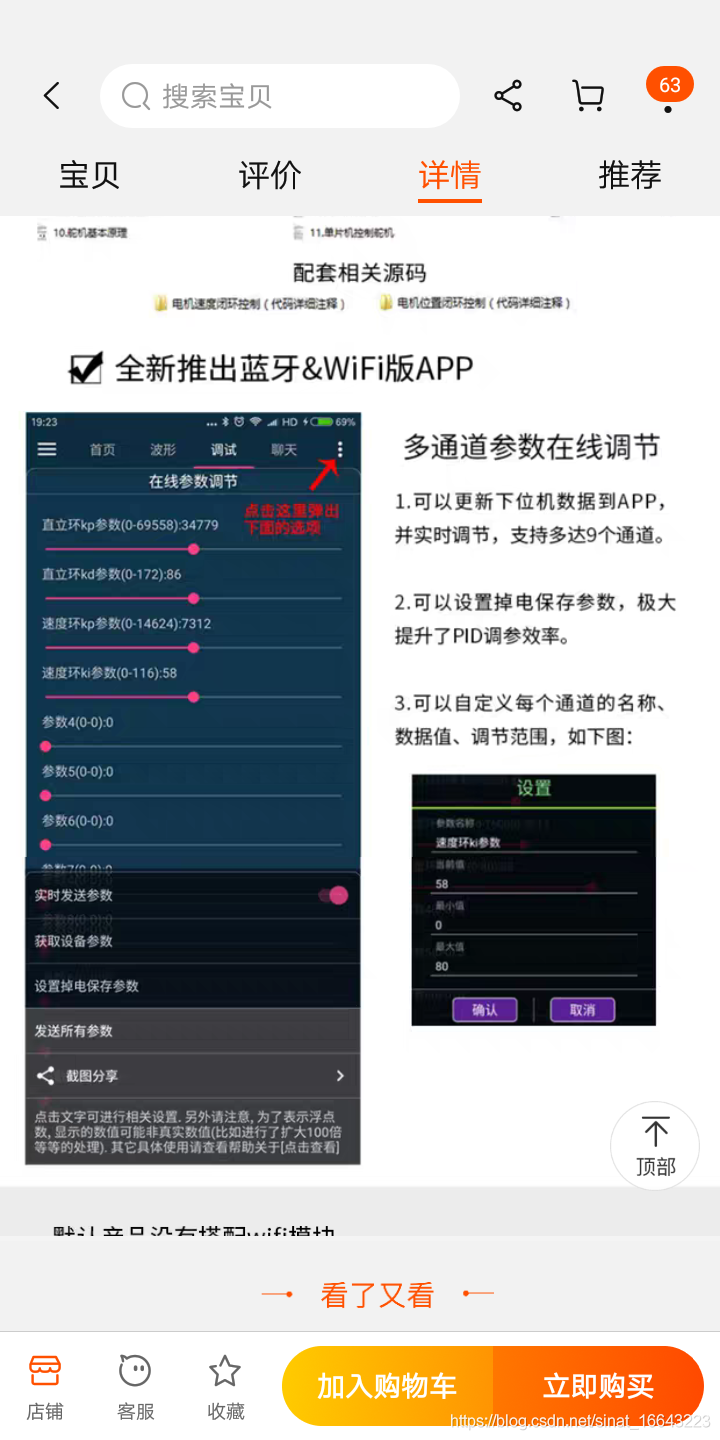
之前不是觉得平衡小车之家的PID在线调参很不错么,其实原来PX4已经可以了。
https://blog.csdn.net/sinat_16643223/article/details/109039222
QGC上是可以对PX4进行在线调参的,也就是在无人机飞的时候修改PID参数,实时观察效果。
2021.4.24 现在知道QGC也可以滑动调参!!!
之前不是觉得平衡小车之家的PID在线调参很不错么,其实原来PX4已经可以了。
https://blog.csdn.net/sinat_16643223/article/details/109039222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






















 5554
5554







