







由于后面的MTPA和弱磁都准备在矢量控制的基础下进行,在此记录下矢量控制其他波形,供日后参考。
1 id=0的矢量控制
1.1 转速+转速环输出波形+电流环iq输出波形
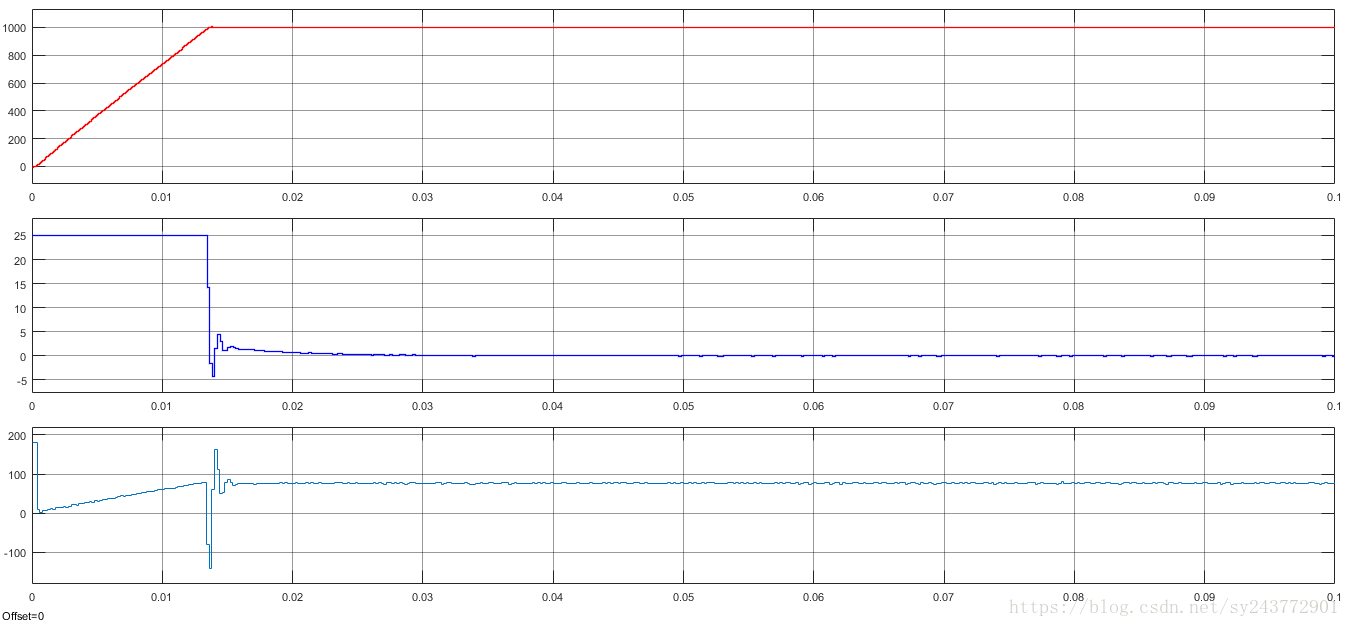
如图给定转速为1000r/min,从图中可以看出,在比较好的PI参数情况下,转速环在速度低于给定的时候迅速饱和,输出电机承受的最大电流25A,使电机最大转矩升速。在到达给定转速之后,转速环迅速降到负值,输出反向转矩,电机迅速降速到达给定,有稍小的波动。
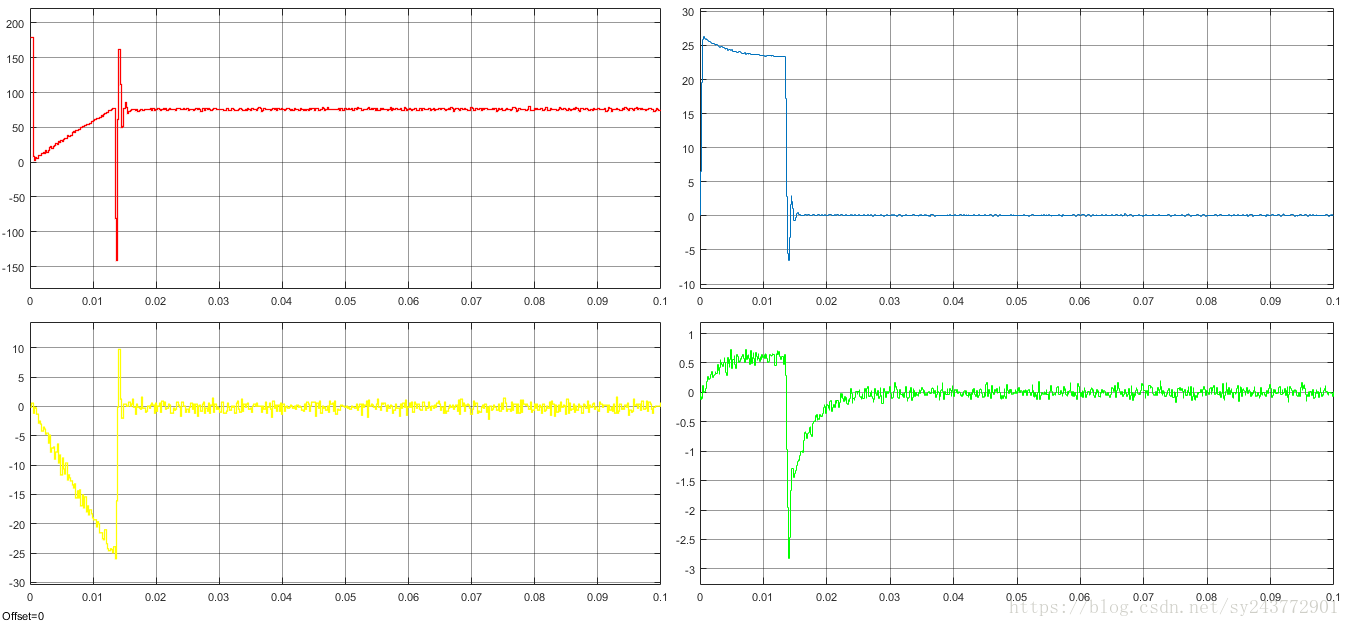
1.2 电流环iq输出+电流环id输出+iqid反馈
1.3 转速+转矩波形
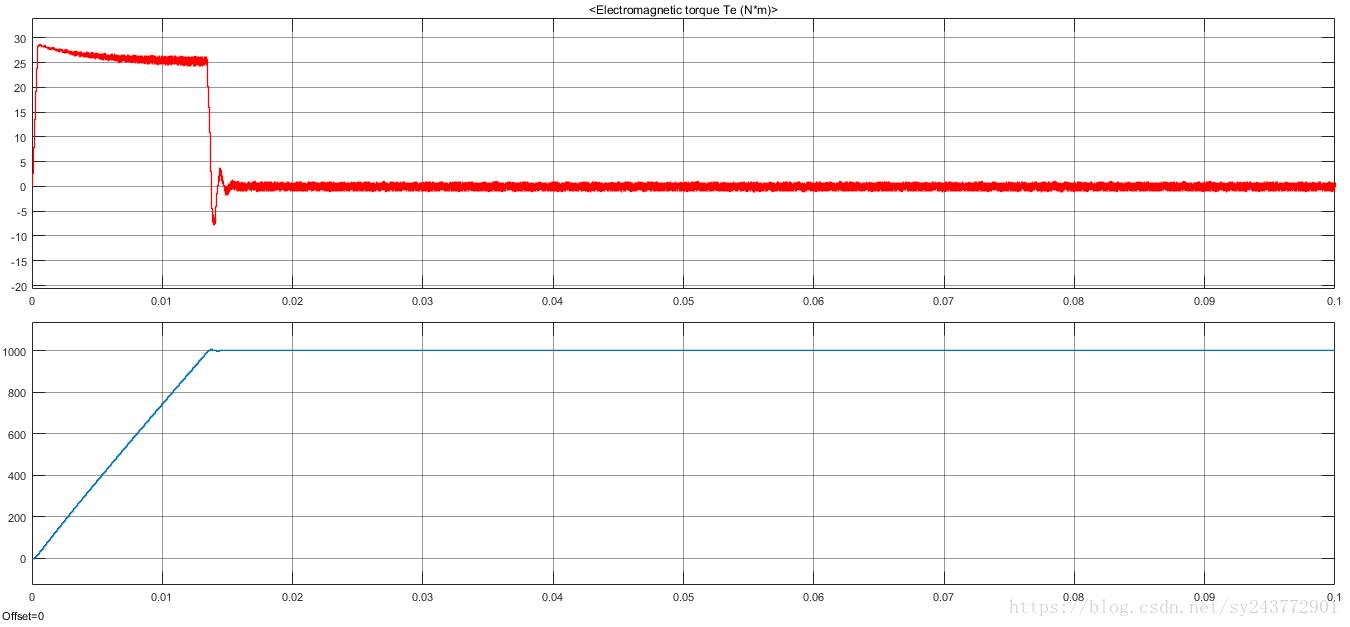
如图在到达给定转速之后,转矩负值,电机迅速降速到达给定,有稍小的抖动。
**最近太忙了都没能看看博客,因此留下链接大家自取吧,里面有书籍有仿真波形也存好了,还有一些教程笔记。链接:https://pan.baidu.com/s/1US_qG8MMYKMglig0iPTwEQ
提取码:8888
系列文章链接:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
永磁同步电机矢量控制(一)——数学模型
永磁同步电机矢量控制(二)——控制原理与坐标变换推导
永磁同步电机矢量控制(三)——电流环转速环 PI 参数整定
永磁同步电机矢量控制(四)——simulink仿真搭建
永磁同步电机矢量控制(六)——MTPA最大转矩电流比控制
永磁同步电机矢量控制(七)——基于id=0的矢量控制的动态解耦策略
永磁同步电机矢量控制(八)——弱磁控制(超前角弱磁)
永磁同步电机矢量控制(九)——三闭环位置控制系统
永磁同步电机矢量控制(十)——PMSM最优效率(最小损耗)控制策略

















 1640
1640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









