







1 弱磁扩速理论
PMSM弱磁的思想来源于他励直流电动机的调磁控制。我们熟知,当他励直流电动机的端电压达到最大值之后,无法再用调压调速来提高转速,只有通过降低电动机的励磁电流,从而降低励磁磁通,实现在保证电压平衡的条件下,电机速度提升到额定转速以上。
永磁同步电机的励磁磁通是由永磁体提供的,这个磁通是恒定不变。这个时候如果我们想降低磁通强度,就只能通过增大定子电流的去磁分量来削弱气隙磁通,这样才能达到跟他励直流电动机的弱磁等效。
1.1 从公式层面来说明弱磁原理
永磁同步电机弱磁控制的本质和规律可以电压平衡方程来说明
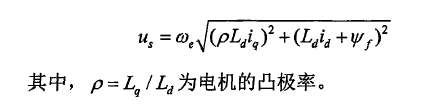
由公式可以看出,在电压达到最大时,要想再升高转速,就只能靠调节 id 和 iq 来实现了,这就是电机的弱磁运行方式。同时电机的电流也是由相应的限制的,增大 iq 的同时必须要减小 id,才能保持电流矢量的大小不变。一般是通过增大 id 来实现弱磁扩速的。
1.2 电压极限环的概念
从公式的推导可以得出电压极限的轨迹是一个椭圆环,电机的电压方程为:
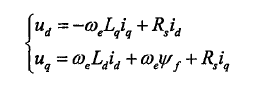
将电压方程带入电压平衡方程,并忽略定子压降,可以得到

从这个推导的方程可以看出电压的极限轨迹十一个椭圆,椭圆的圆心是 。
。
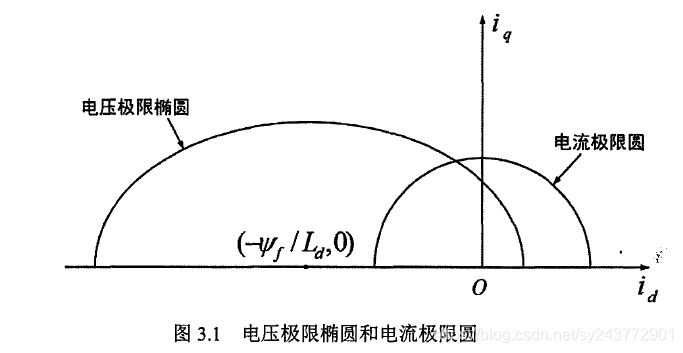
这里面有什么物理含义呢? 其实从图中可以看出,要使电机稳定的运行,电压必须处于这个电压极限圆的曲线内,一旦超过电机将不稳定。
1.2 电压流限环的概念
我们再来了解电流极限环的概念,永磁同步电机的电流极限可以用方程描述:
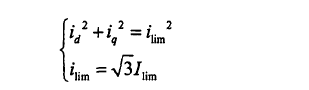
式中的 Ilim是电动机允许的最大相电流值。
有了这电流极限环的概念,我们再结合电压极限环,我们可以知道,如果要使电机稳定运行,电流矢量的终点必须落在电流极限环和电压极限环的圆之内,也就是电流矢量的终点必须落在电压极限环和电流极限环的公共区域,否则电机将无法稳定运行。
2 如何实现弱磁扩速
有了以上的概念,我们该如何在仿真中实现弱磁呢?采用双电流调节器的超前角弱磁控制。
2.1 超前角是什么?
定义:超前角  为两相旋转坐标系dq坐标系下,定子电流矢量超前q轴的电角度。 如下图所示
为两相旋转坐标系dq坐标系下,定子电流矢量超前q轴的电角度。 如下图所示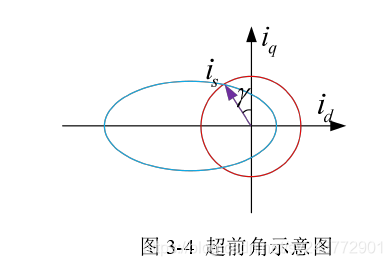
2.2 超前角弱磁的原理是什么?
当转速达到转折速度时,电流调节器仍然处于饱和状态,定子电压已经达到极限状态。如果我们此时通过电压反馈来调节超前角 在到达额定转速后增大,直轴的去磁电流反向增大,交轴电流也随之减小,随着直轴去磁电流的增大,磁通减小。以此实现在不增加逆变器容量的情况下弱磁。
2.3 超前角控制框图
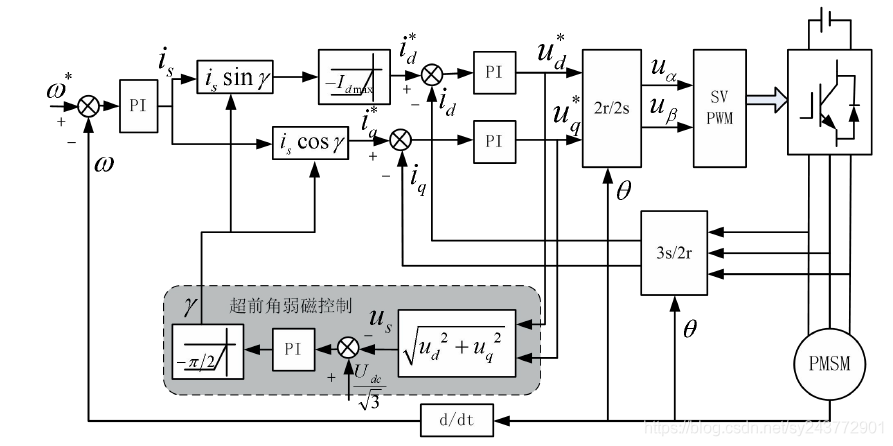
具体如何是现在simulink里面判断是否达到额定转速呢?
电流调节器的输出 ud 和 uq 作为弱磁调节器的输入量,并于逆变器所能输出的最大电压 Umax比较,二者的偏差作为弱磁环节的PI调节器的输入,PI调节器输出超前角来调节 iq 和 id 的给定。
由于采用的时SVPWM调制, ,此时有几种情况
,此时有几种情况
1,当 小于Umax时电压PI调节器正向饱和,此时超前角为0,电机运行在恒转矩区
小于Umax时电压PI调节器正向饱和,此时超前角为0,电机运行在恒转矩区
2,当大于Umax时电压PI调节器的输入值为负数,调节器开始退出饱和,输出的超前角为负,此时电机运行在弱磁区。
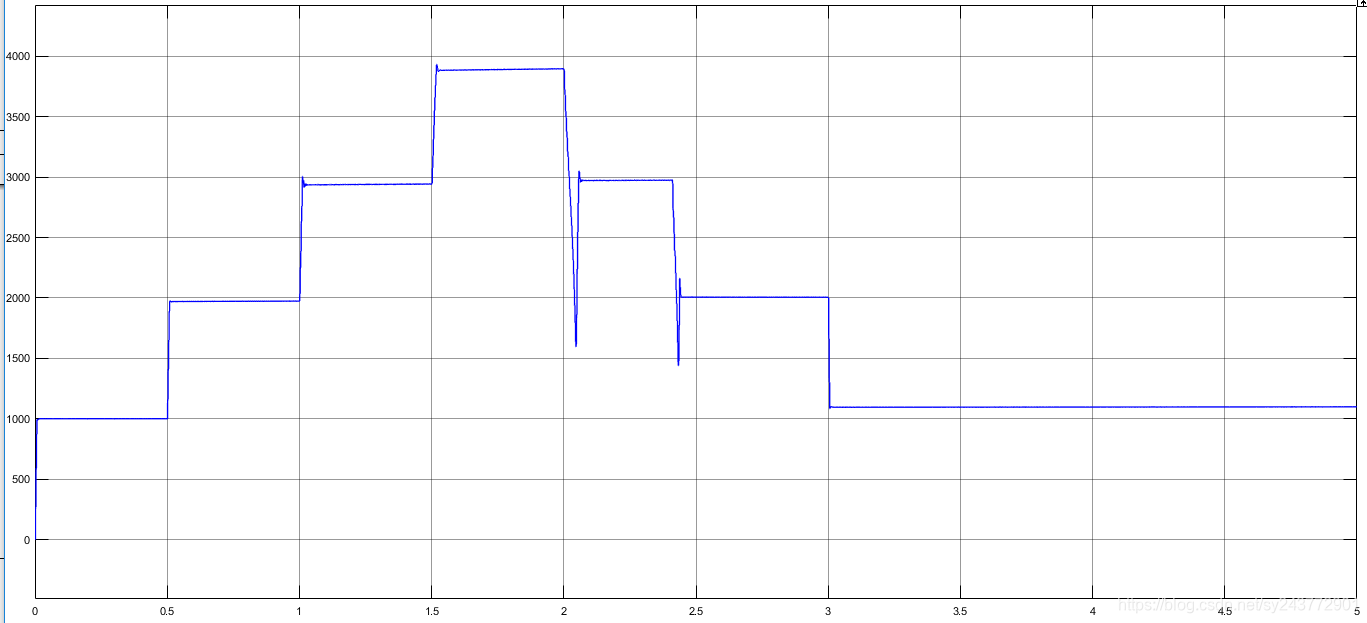
3,实验结果分析(明天补上)
转速波形 电机的额定转速为2300,不加弱磁,超过2300之后电机直接跑飞了(0.5s 为1000,1s为2000,1.5s为3000以此类推)
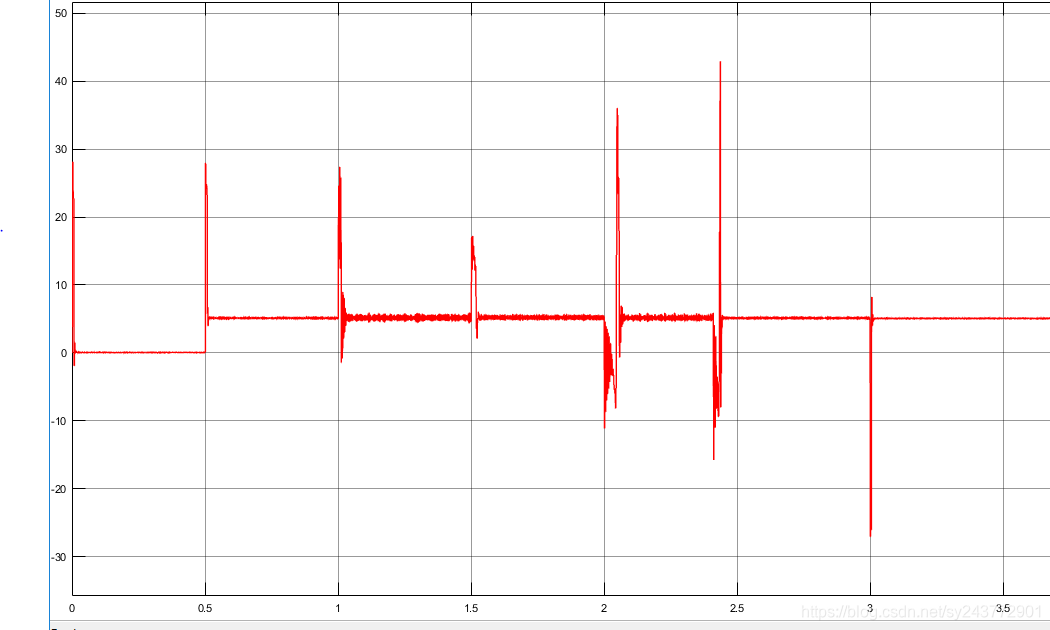
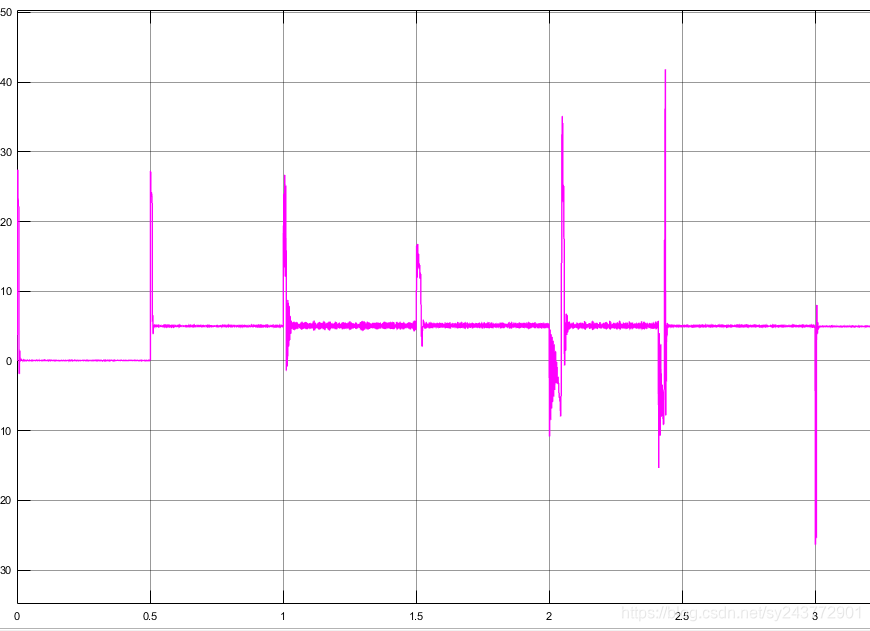
转矩波形(外部负载5N)
d轴电流(外部负载5N)
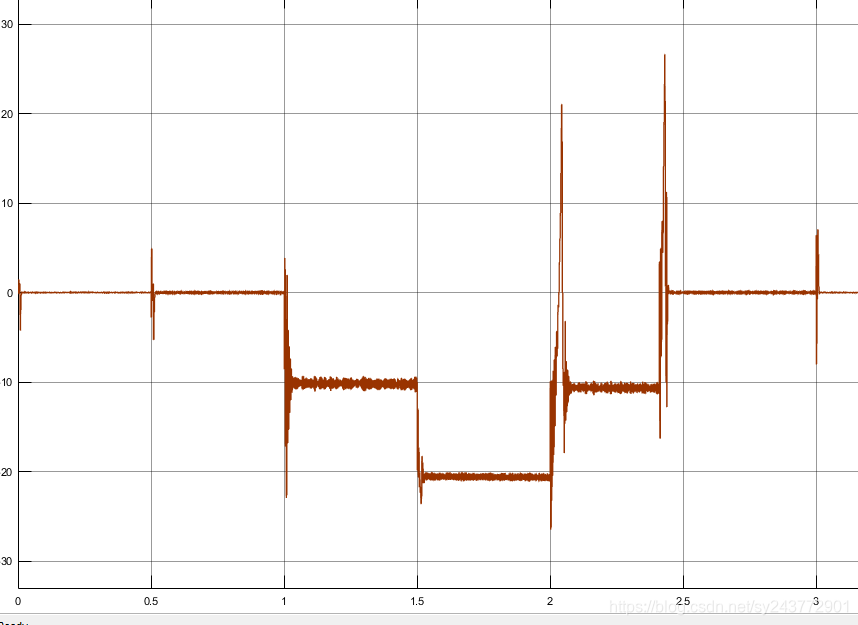
q轴电流(外部负载5N)
小结:
超前角弱磁方式的特点在于结构简单,易于实现,也较易于在实验中实现,但是超前角弱磁,仍然存在弱磁电流过强导致去磁的风险,图中波形虽然毛刺较小,但明显有较大的超调,导致波形不够好看,但基本实现了弱磁扩速,并且能够带载运行。模型还需要修改的地方很多。
需要文章资料与仿真模型的同学请博客私信我,请勿评论留下个人信息,避免信息外泄,私信看到就会发过去。

系列文章链接:
永磁同步电机矢量控制(一)——数学模型
永磁同步电机矢量控制(二)——控制原理与坐标变换推导
永磁同步电机矢量控制(三)——电流环转速环 PI 参数整定
永磁同步电机矢量控制(四)——simulink仿真搭建
永磁同步电机矢量控制(五)——波形记录及其分析
永磁同步电机矢量控制(六)——MTPA最大转矩电流比控制
永磁同步电机矢量控制(八)——弱磁控制(超前角弱磁)
永磁同步电机矢量控制(九)——三闭环位置控制系统
永磁同步电机矢量控制(十)——PMSM最优效率(最小损耗)控制策略

















 4944
4944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









