






【树莓派】树莓派安装ROS2
15.1 安装系统
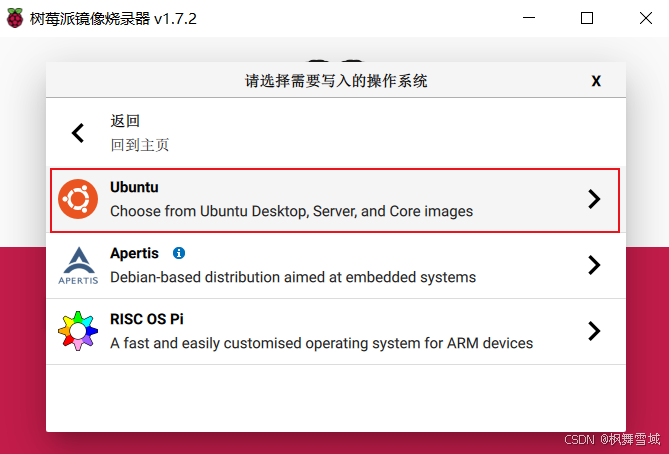
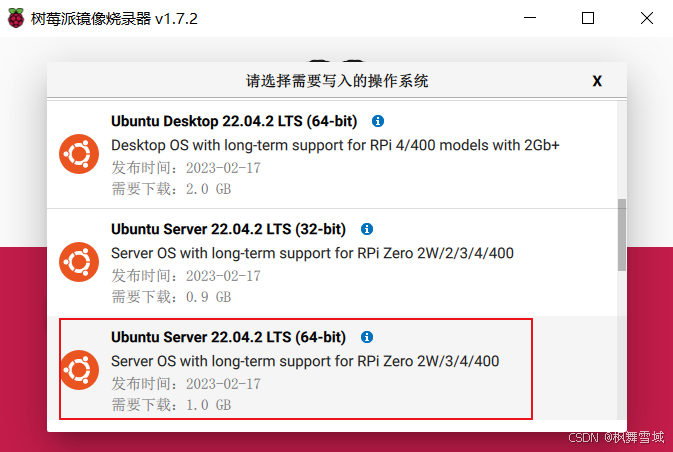
15.1.1 Ubuntu server 22.04.1 LTS(64-bit)
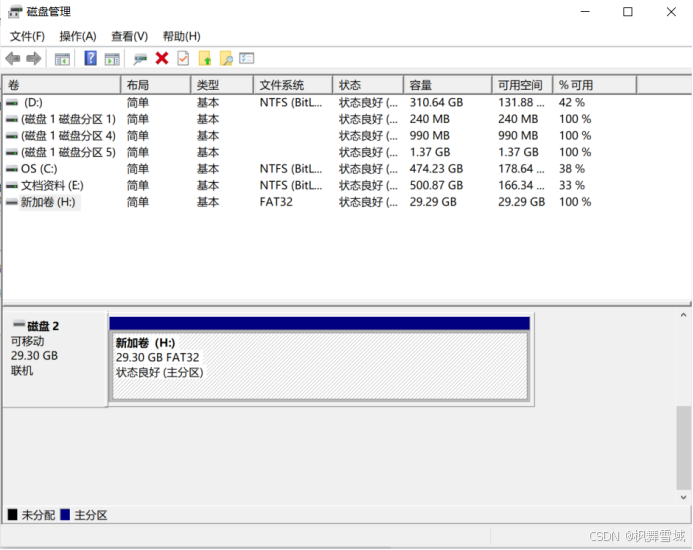
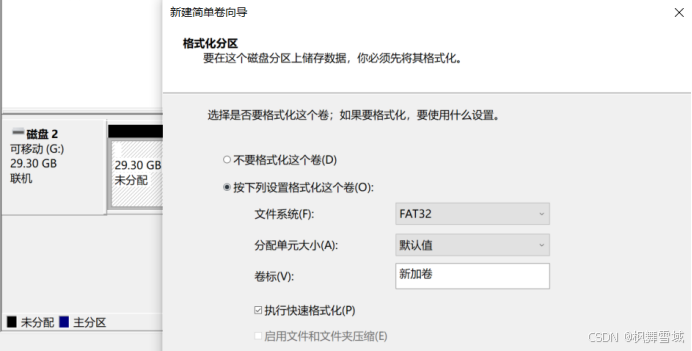
准备好SDK卡,并在电脑中格式化。
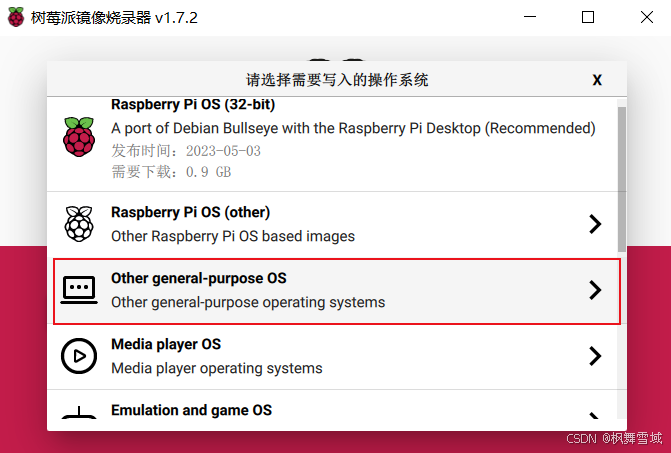
官网下载树莓派官方镜像烧录工具(点击即可跳转下载),一定要以管理员身份运行。下载后安装,选择相应的操作系统。
进行相关设置。

本次使用的手机热点,手机热点要设置到2.4G频段(为了方便在不同地方使用)。

设置完成后开始烧录。


通过电脑卸载SD卡。此时弹出格式化内存卡的窗口点击取消即可,不可再进行格式化。
15.1.2 将存储卡插入树莓派
将存储卡从读卡器中卸下,插入树莓派,按照前面章节“树莓派网络连接拓扑图”进行连接,启动电源。
15.1.3 获取树莓派IP地址
注意:一定要退出一些可能导致网络访问限制的杀毒软件!!!
可将树莓派插到电脑网口,获取树莓派地址。通过ipconfig命令查看。
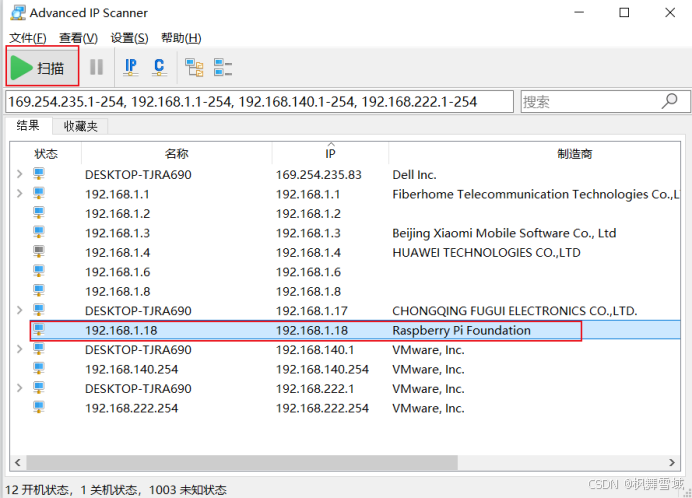
15.1.4 使用 IP扫描器 - Advanced IP Scanner(没有显示器)
局域网IP扫描工具 Advanced IP Scanner,官网下载链接:https://www.advanced-ip-scanner.com/cn/ 需要先在你的 windows电脑安装 Advanced IP Scanner,并且保证电脑和树莓派在同一网段内(同一路由器、交换机下)。 运行,点击 " Sacn " 开始扫描。 之后寻找到有 " Raspberry Pi Foundation " 字样的设备,即为树莓派的 IP 和 MAC。
15.1.5 登录密码
主机名:raspberrypi.lacal
User name: pi
Password:raspberry
15.1.6 powershell登录Ubuntu
通过快捷键Win+r,输入powershell回车打开PowerShell(或者在开始菜单中查找Windows PowerShell)。
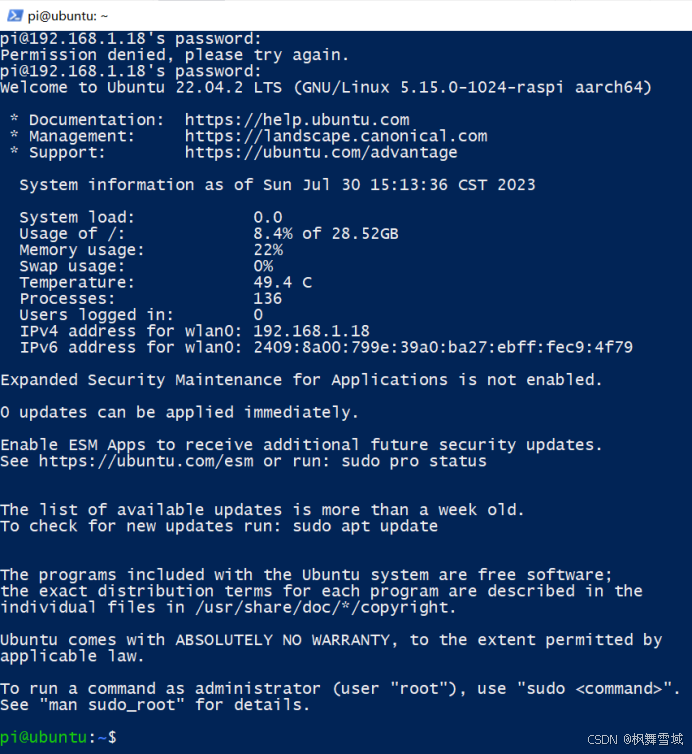
然后在命令提示符中输入类似如下登录命令ssh 用户名@树莓派IP地址回车进行登录。树莓派的默认用户为pi,IP地址可以通过查询路由器或者在树莓派上运行ifconfig来查看。第一次登录会收到登录提示,类似如下:
SSH pi@192.168.1.18

输入yes后继续,会收到输入密码的提示,树莓派安装后的默认密码是raspberry。此时输入密码,无论你怎么按键盘,都没有输入显示在命令框上,这是正常的,是一种安全手段。
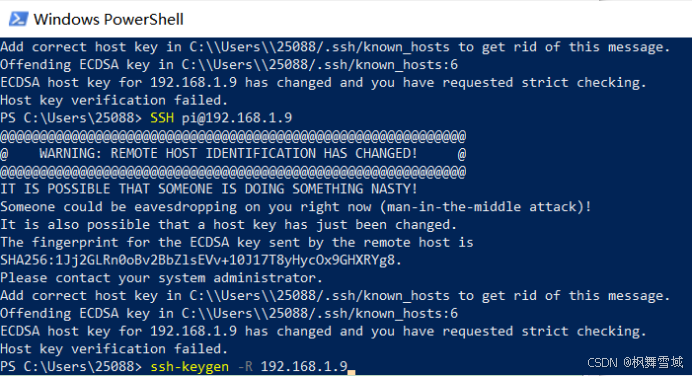
无法登录时的解决方法
ssh-keygen -R 192.168.1.9
15.1.7 更新Ubuntu系统
输入命令:
sudo apt update
sudo apt upgrade



















 955
955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











