




 本文介绍了TFmini激光雷达如何应用于机器人防跌落,通过实时测距和算法判断,防止机器人遇到台阶或凹陷时跌落。讨论了应用原理、开发注意事项,强调了激光雷达的优势,如体积小、精度高、低功耗,以及其在机器人避障、唤醒等场景的扩展应用。
本文介绍了TFmini激光雷达如何应用于机器人防跌落,通过实时测距和算法判断,防止机器人遇到台阶或凹陷时跌落。讨论了应用原理、开发注意事项,强调了激光雷达的优势,如体积小、精度高、低功耗,以及其在机器人避障、唤醒等场景的扩展应用。
一、 应用场景介绍
机器人在移动行进的过程中,可能会遇到路面有向下的台阶或者地面凹陷等情况。如果没有相应的探测和处理措施,机器人就会有跌落的风险。

TFmini 激光雷达作为测距传感器,拥有娇小的身材和较高的精度,可以用做机器人的防跌落传感器,实时探测前方位置距离信息并进行判断,使机器人及时做出例如刹车、减速、转弯等防跌落反应。

二、 应用原理
机器人在行进过程中,安装于机器人上的 TFmini 激光雷达以一定角度实时向斜下方测距。当路面较平坦时,这个距离值应该在一定的范围内;当路边有向下台阶或者凹陷时,这个距离值会超出合理范围,发生距离突变。结合机器人自身的姿态数据、速度数据以及Tfmini 激光雷达的安装位置等数据,依据相应的算法判断前方是否存在向下台阶或者凹陷,从而控制机器人做出防跌落响应动作。
道路较平坦时,测距距离在 A1 到 A2 范围内,并且距离变化较为连续;前方有阶梯或者凹陷时,测距距离值会有明显跳变,相同姿态下数值变大,(B>A,B1>A1,B2>A2)如下图所示:
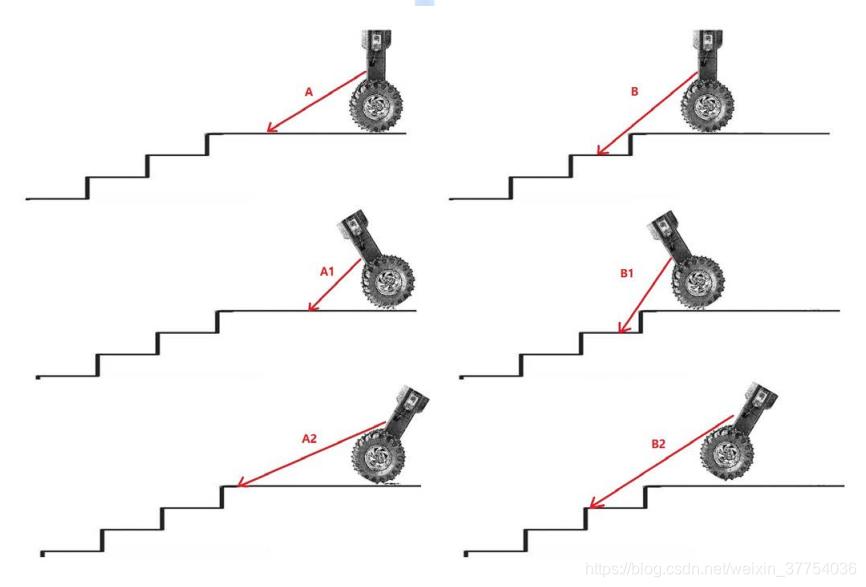
依据这个原理,便可以判断前方路面是否有阶梯或凹陷,使之采取例如刹车、减速、转弯等防跌落措施。
三、 应用开发注意事项
- 大多数机器人身体两侧各有一个车轮,TFmini 激光雷达视场角比较小,可以使用两个T
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 882
882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









