







环境说明:
ubuntu16.04
ROS Kinetic
安装步骤:
1.配置Ubuntu仓库,“restricted,” “universe,” and “multiverse.”,选择清华源;

2.安装源
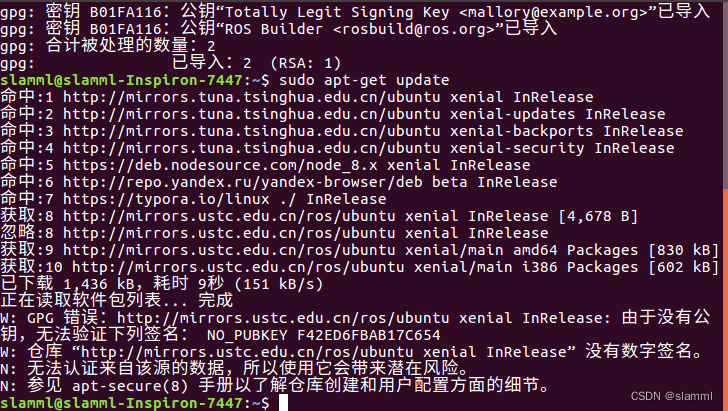
$ sudo apt-get update
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
$ sudo apt-get update
#ERROR1解决方案:sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
$ sudo apt-get install ros-kinetic-desktop-full
3.解决依赖,配置环境变量
$ sudo rosdep init
# ERROR2的解决方案:
(修改resolv.conf文件
sudo gedit /etc/resolv.conf,将原有的nameserver这一行注释,并添加以下两行:
nameserver 8.8.8.8 #google域名服务器
nameserver 8.8.4.4 #google域名服务器
保存退出,执行sudo apt-get update;sudo rm /etc/ros/rosdep/sources.list.d/20-default.list;重新执行原操作)
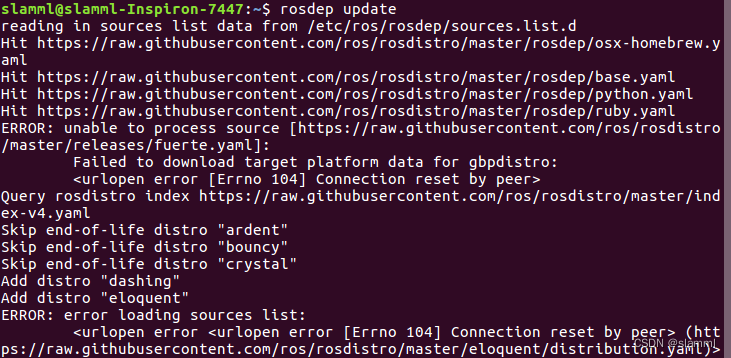
$ rosdep update
# ERROR3的解决方案:
(检查网络问题,重试原操作)
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc

4.安装rosinstall工具
$ sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
5.测试安装是否成功(可选)
在Terminal中运行以下命令:
$ roscore
新开一个terminal,运行以下命令,打开小乌龟窗口:
$ rosrun turtlesim turtlesim_node
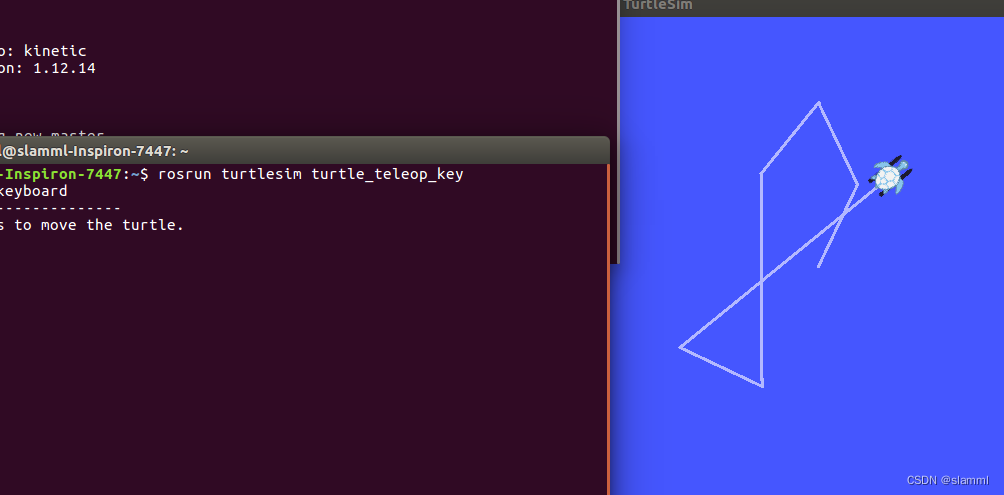
新开一个terminal,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动:
$ rosrun turtlesim turtle_teleop_key
选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动。
新开一个terminal,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
$ rosrun rqt_graph rqt_graph
至此,测试完成,说明ROS安装没有问题。















 26万+
26万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









