







Qt(十六)——利用QT同时启动多个ROS launch文件
一、总述
众所周知,大家有时候在跑一个ros的应用,需要启动多个ros launch文件。因此需要利用qt creator,制作一个简单ui,通过点击按钮,同时启动多个launch文件。再有就是ROS系统下的各个launch文件的的执行都得在terminal终端执行,而且ROS系统对于非开发者的使用难度很大,故而导致ROS系统在产品化的过程中使用受阻;而且在机器人系统开发的过程中,常常需要启动多个launch文件,故而想在利用QT界面中的按键命令一次性运行多个launch文件。
二、创建带按钮的简单UI
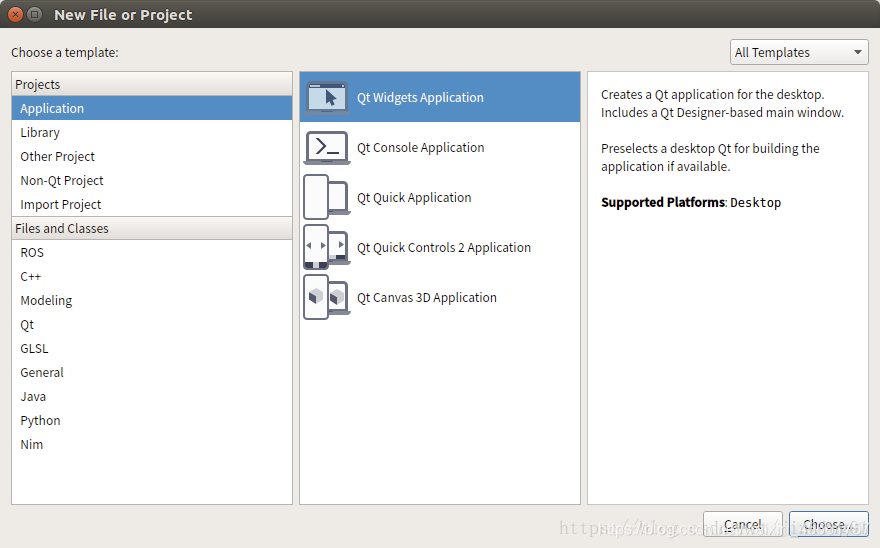
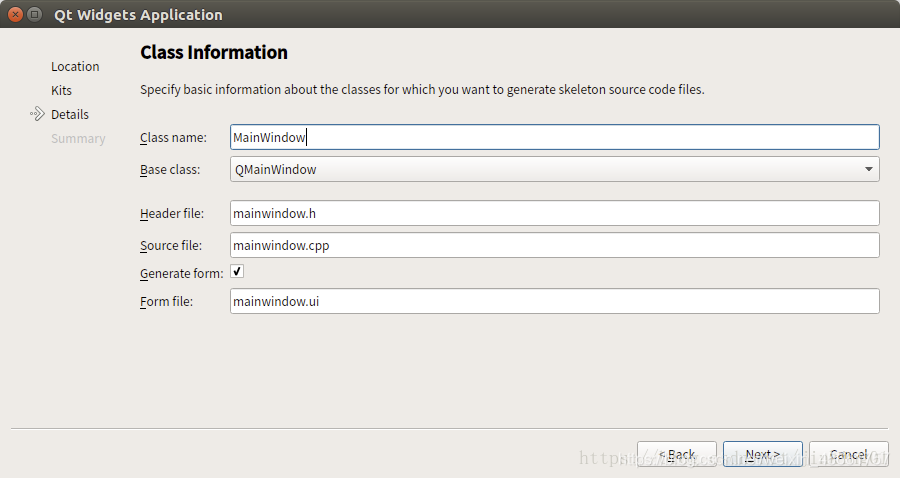
1、创建一个新的工程(Qt Widgets Application)
2、创建功能包
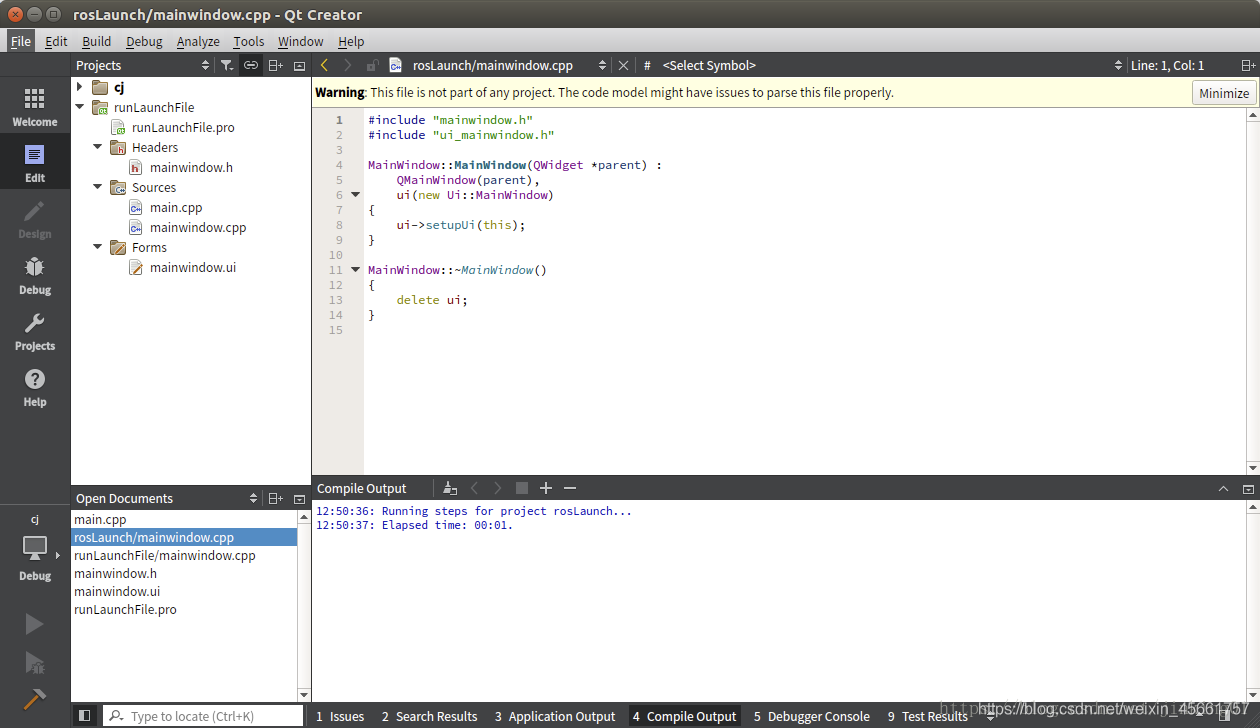
3、工程结构
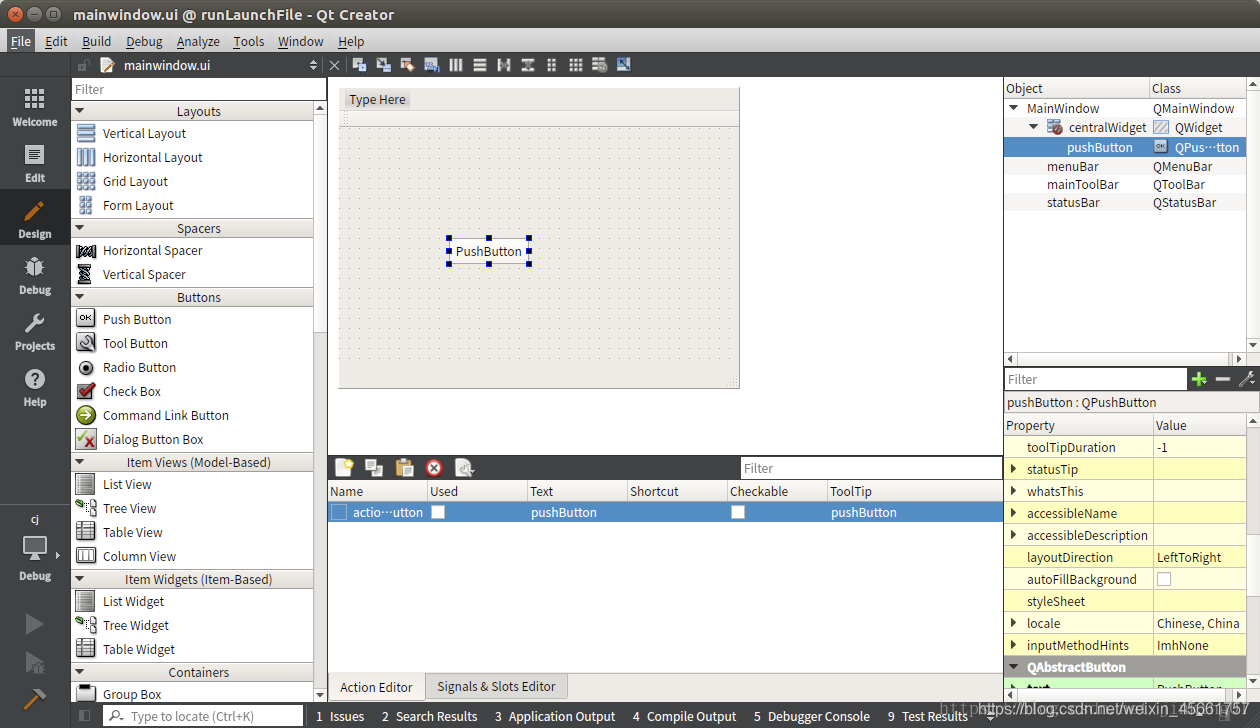
4、编辑UI
选中.ui文件,对UI进行编辑。
5、按钮添加动作(slot)
点击按钮,右键–goto slot
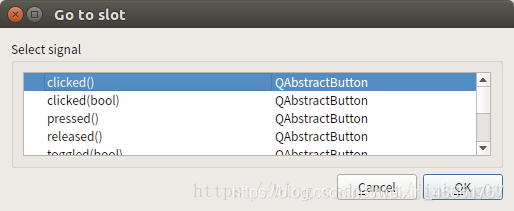 自动会在.h文件中添加
自动会在.h文件中添加
private slots:
void on_pushButton_clicked();
同时自动会在.cpp中添加
void MainWindow::on_pushButton_clicked()
{
}
之后在.cpp中添加launch命令
void MainWindow::on_pushButton_clicked()
{
system("gnome-terminal -x bash -c 'source ~/catkin_ws/devel/setup.bash; roslaunch rikirobot bringup.launch'&");
system("gnome-terminal -x bash -c 'source ~/catkin_ws/devel/setup.bash; rosrun rviz rviz'&");
#exit(0);
}
注:
<1>这里的~/catkin_ws 是我的工作空间,后续可以替换成自己的工作空间(workspace或者某_ws)的路径 ,rikirobot是我创建的package,替换成自己的package以及对应的launch文件;
<2>system函数中务必添加 source ~/catkin_ws/devel/setup.bash;目的是确保能找到所有相关联的包(Package);否则将不能运行launch文件;
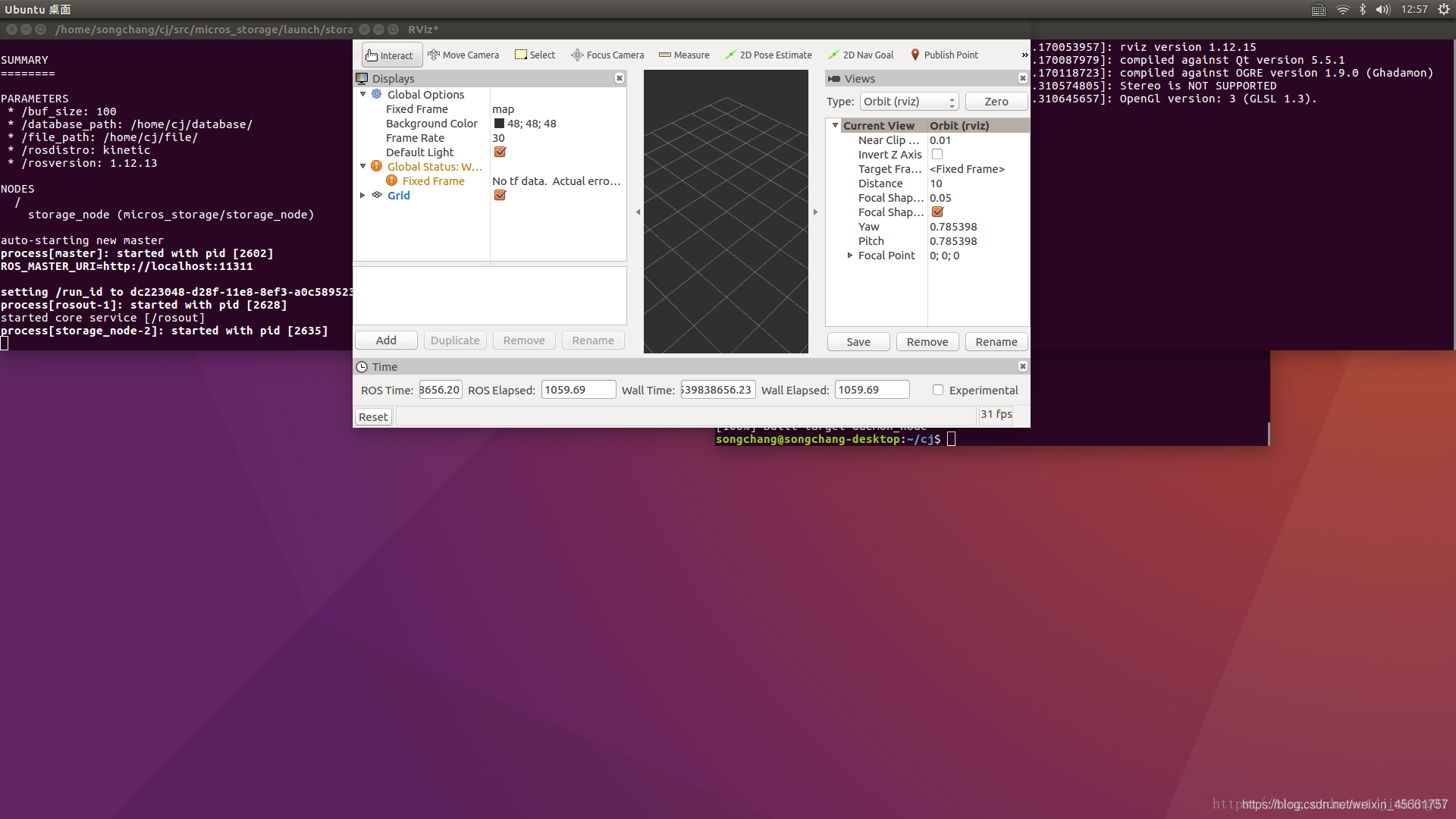
6、编译工程,运行文件
build all
run
点击按钮,会启动rviz和bringup的app。
















 3361
3361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











