






 本文介绍了使用线性霍尔传感器结合单极对磁环实现离轴式绝对位置测量的方法,探讨了峰值得校准、角度计算以及通过增加传感器数量和使用差分减法器提高精度的过程。最终,通过插值校准,实现了约0.1°的测量精度。
本文介绍了使用线性霍尔传感器结合单极对磁环实现离轴式绝对位置测量的方法,探讨了峰值得校准、角度计算以及通过增加传感器数量和使用差分减法器提高精度的过程。最终,通过插值校准,实现了约0.1°的测量精度。
线性霍尔实现离轴式绝对位置测量
这里讲一种通过线性霍尔+单极对磁环来实现离轴式绝对位置测量的方法,我们在设计电机离轴式编码器方案时,比较多的是用光编和磁编。其中磁编有很多现成的芯片方法,比如IC-haus、MPS、麦歌恩等都有现成的芯片方案,这些方案使用起来十分的简单,校准、信号解码等都集成。这里介绍的是一种使用线性霍尔来实现的低成本方案,精度对于使用在低速端读取关节端绝对位置完全够用。
一般磁环我们选择径向冲磁,对于一个线性霍尔传感器,传感器输出电压的形式如图所示是一个正弦波。由于没有校准相位,所以峰值振幅未知。
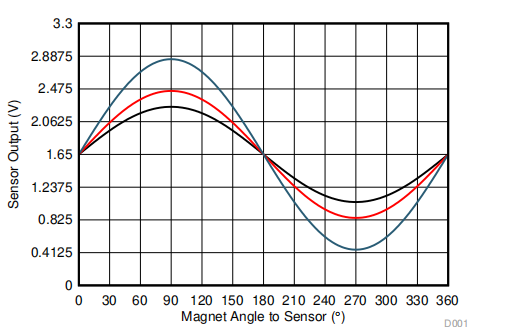
如果我们间隔90°放置两个传感器输出波形如下图,我们看到两个正弦波的峰值是不相等(大多实际情况也是不相等的)。我们先这样想,如果通过某种方法两其峰值相等,相隔90度的传感器是否就等于
a
∗
s
i
n
θ
{ a*sin\theta }
a∗sinθ 和
a
∗
s
i
n
θ
+
π
2
{ a*sin\theta + \frac{\pi}{2} }
a∗sinθ+2π 三角函数公式转换不就成了
a
∗
s
i
n
θ
{ a*sin\theta }
a∗sinθ和
a
∗
c
o
s
θ
{ a*cos\theta }
a∗cosθ.,这样一看是否就可以通过求反正切得到角度呢?

首先我们要做的就是峰值校准,公式ti文档直接给了出来。

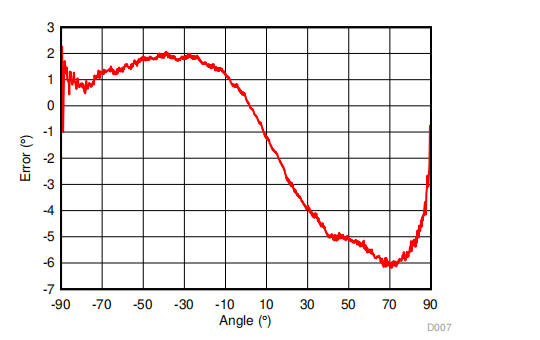
理论上通过峰值校准后求出反正切就能得到角度,但是理论归理论,实际上直接通过两个间隔90°的线性霍尔传感器求反正切得到的角度误差ti给出来的文档大概在8°以内,实际我测下来在±5°,可能传感器选择和其他方面和ti有差异。
所以我们需要对数据进行处理,首先通过硬件方法,这里摘抄一下付彦超大佬的论文,分别对2、4、8个线性霍尔输出的正交型号绘制李萨如曲线,如下图。
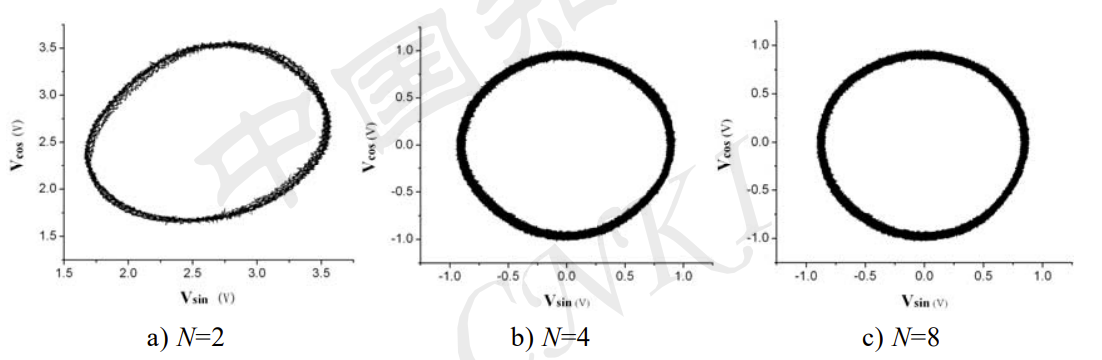
这个曲线就很形象,增加传感器数量能够较小误差,但是我们知道单片机算力和ADC资源有限,不可能每个信号都交给单片机来解码。所以一般选择四个间隔90°传感器,将两个间隔180°的传感器数据接入差分减法器的正反相输入端,由于间隔180°波形相反,减法器输出的是反向叠加的波形,起到一个叠加滤波的效果。
将两个减法器输出的正余弦信号输入单片机后,再进行插值校准。原理也很简单,使用查找表校准系统,记录已知角度的传感器电压数据,然后从已知电压之间的线性插值中获取任何测量电压的角度。具体过程就是通过开环强拖或者其他方式使磁环旋转一周,对于每个期望的校准角度,将磁铁旋转到该角度,并记录每个传感器的测量电压(类似于MITcheetah的线性化校准),然后,在正常操作期间,每个传感器的测量电压落在先前记录的两个电压之间,称为Vsbover和Vsbower。使用两个传感器时,确保每个传感器的Vavover和Vbewer与相同的校准角度相关联,然后将测量的角度作为这两个电压和各自已知角度的比率,直接贴出ti的公式。

这样操作后精度基本能到0.1°,也没太具体的测试。

















 1107
1107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









