







 本文介绍如何在Unity中使用球体射线进行碰撞检测,包括设置射线起点、目标点及射线参数等,并通过代码实现球体射线检测功能。
本文介绍如何在Unity中使用球体射线进行碰撞检测,包括设置射线起点、目标点及射线参数等,并通过代码实现球体射线检测功能。
http://blog.csdn.net/l773575310/article/details/73251093
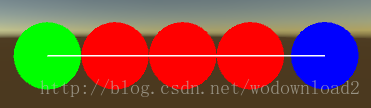
从摄像机所在位置发送一个球体射线,看看射线之间有没有碰撞体。
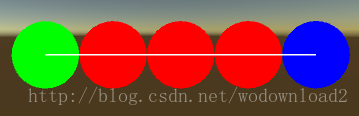
绿色的球为射线发射的起点;
红色为路径上的球体射线;
蓝色为目标检测点;
这里可能不太好懂的是红色的球,这里可以暂时放一放。
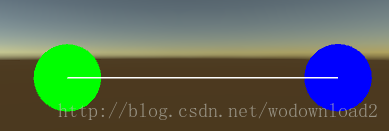
我们暂时将蓝色的球隐藏掉,并且使用下面的代码,发送球体射线。
代码如下:
using UnityEngine;
using System.Collections;
public class NewBehaviourScript1 : MonoBehaviour
{
public GameObject from;
public GameObject target;
public float radius = 1.0f;
public float maxDis = 1.0f;
public void OnGUI()
{
if(GUI.Button(new Rect(100,100,100,100),"test"))
{
TestSphereCast();
}
}
public void TestSphereCast()
{
RaycastHit hit;
Vector3 p1 = from.transform.position;
Debug.LogError(from.transform.forward);
if (Physics.SphereCast(p1, radius, from.transform.forward, out hit, maxDis))
{
Debug.LogError(hit.collider.name + " " + hit.distance);
}
//RaycastHit[] hits = Physics.SphereCastAll(p1, radius, from.transform.forward, maxDis);
//for(int i=0;i<hits.Length;++i)
//{
// Debug.LogError(hits[i].collider.name);
//}
}
public void OnDrawGizmos()
{
Gizmos.DrawLine(from.transform.position, target.transform.position);
}
}
你可以看到输出:
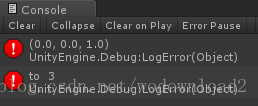
这里讲解下输出内容的意思:
(0.0,0.0,1.0)为绿色球的正方向。
to 3位射线检测到的点。
此时,我们看看代码的意思,并且看看配置:
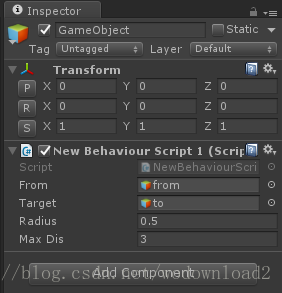
这里我们从from发送球体射线,球体的半径为0.5,发送射线的长度最大为3米。
那么此时我们看看from的位置以及to的位置。
from的位置为:(0,0,0)
to的位置为(0,0,4)
此时我们再把红色的球显示出来。
当球体射线发送到最后一个红色的球的时候其位置为(0,0,3),此时这个红色的球与蓝色的球(目标点)相碰撞,也就说明蓝色的球被检测到了。
安装这个推论,我们将蓝色的球稍微的移动一点到远一点的地方比如(0,0,4.1),那么此时是检测不到的,因为射线的最大距离为4。经过试验
注意此时,为了说明方便,把红色的球显示出来了,在运行的时候,要隐藏掉,因为这里使用的SphereCast而不是SphereCastAll。这两个的区别是,前者遇到第一个碰撞就停止检测了,而后者会检测路径上的所有的碰撞体。
这里也给出SphereCastAll的代码,这要把上面的代码中的注释的部分打开即可。

















 3247
3247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









