







自动驾驶技术作为现代交通领域的革新力量,其软件工程中的全局规划环节扮演着至关重要的角色。本博客将深入剖析自动驾驶全局规划的核心原理与实现方法,包括道路网络建模、路径搜索算法、决策制定策略等关键内容。通过全面阐述全局规划在自动驾驶中的作用,以及探讨其面临的挑战与未来发展趋势,本文旨在为自动驾驶软件工程的研发提供有益的参考和思路,推动自动驾驶技术的进一步发展与应用。
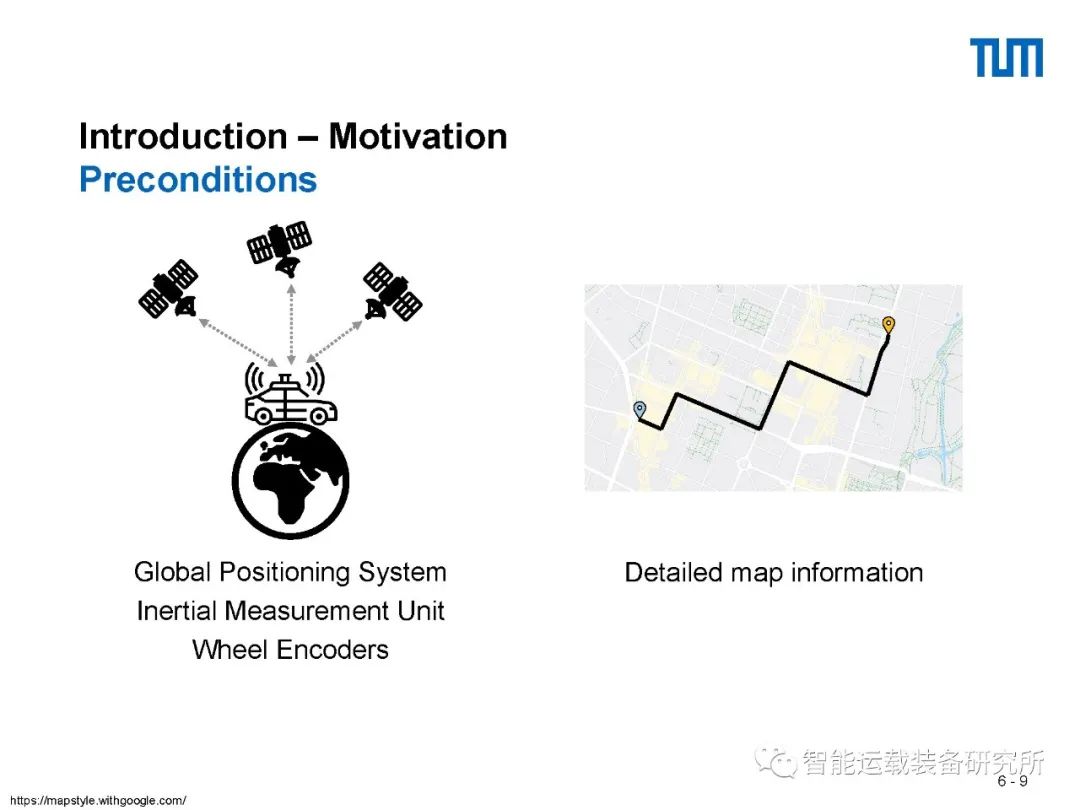
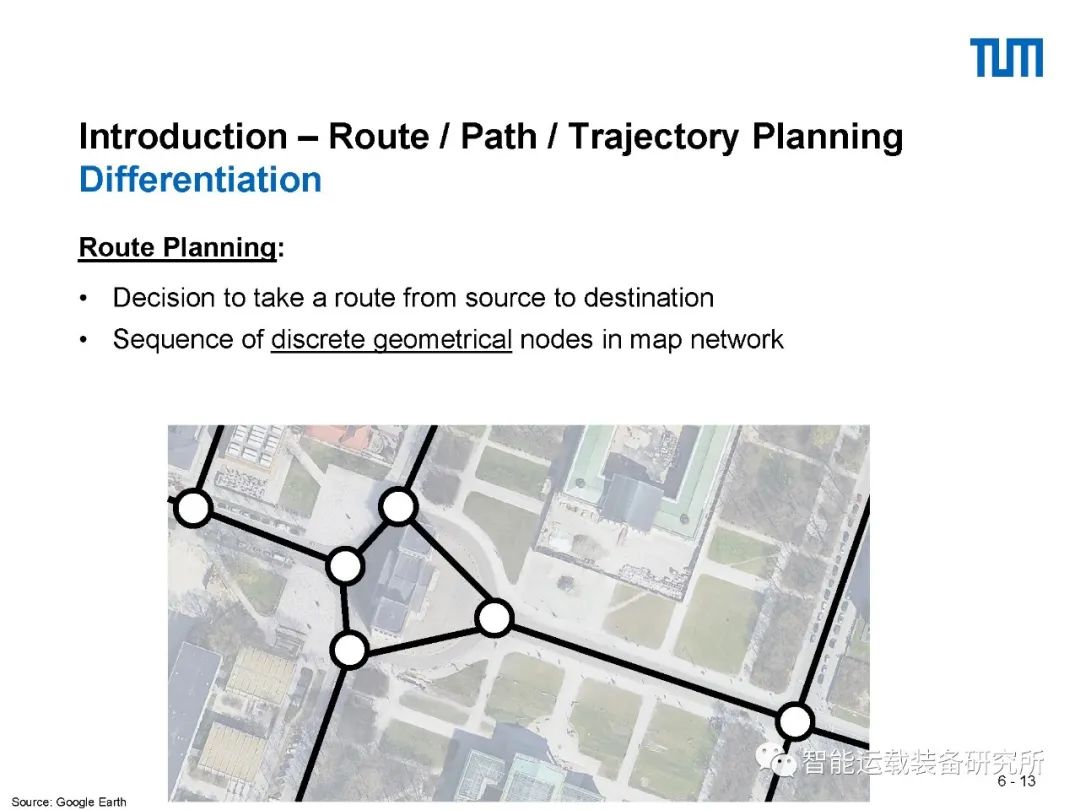
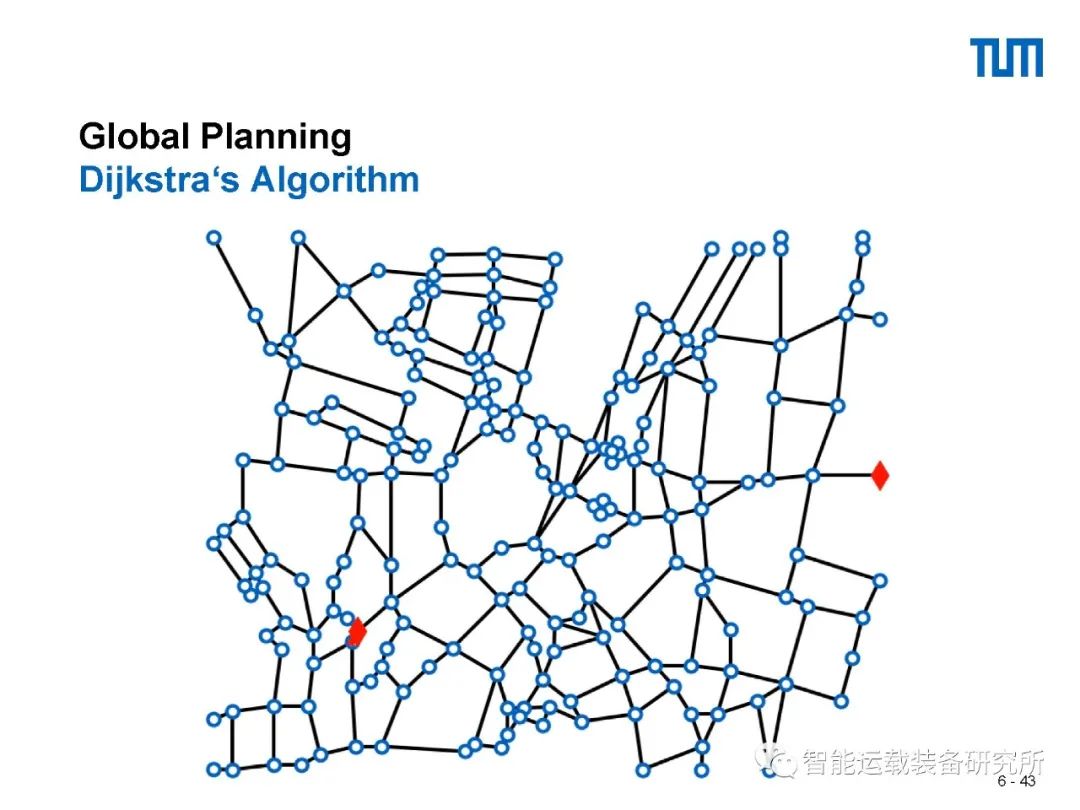
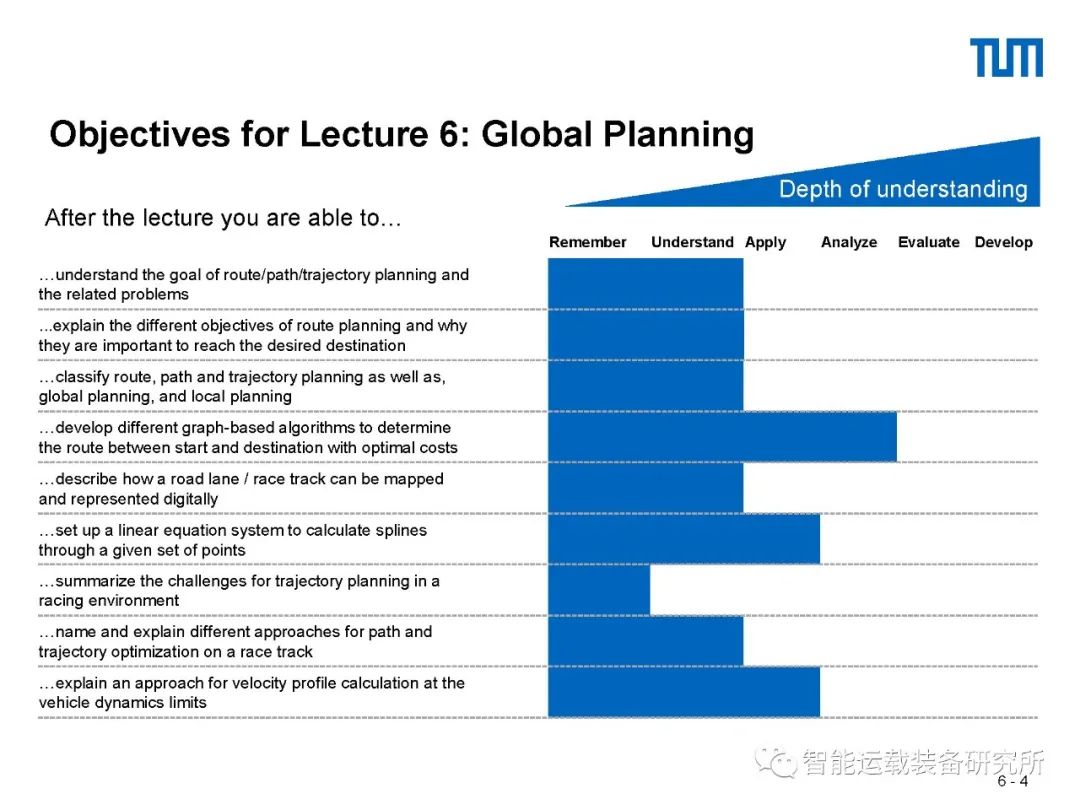
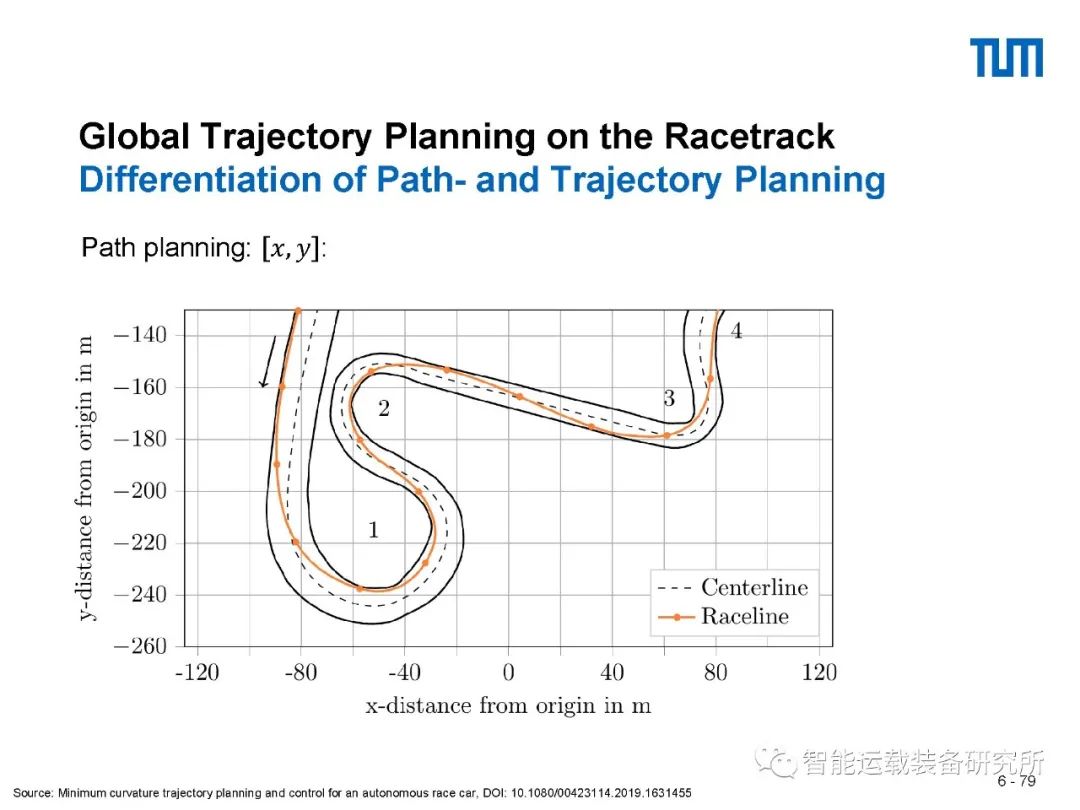
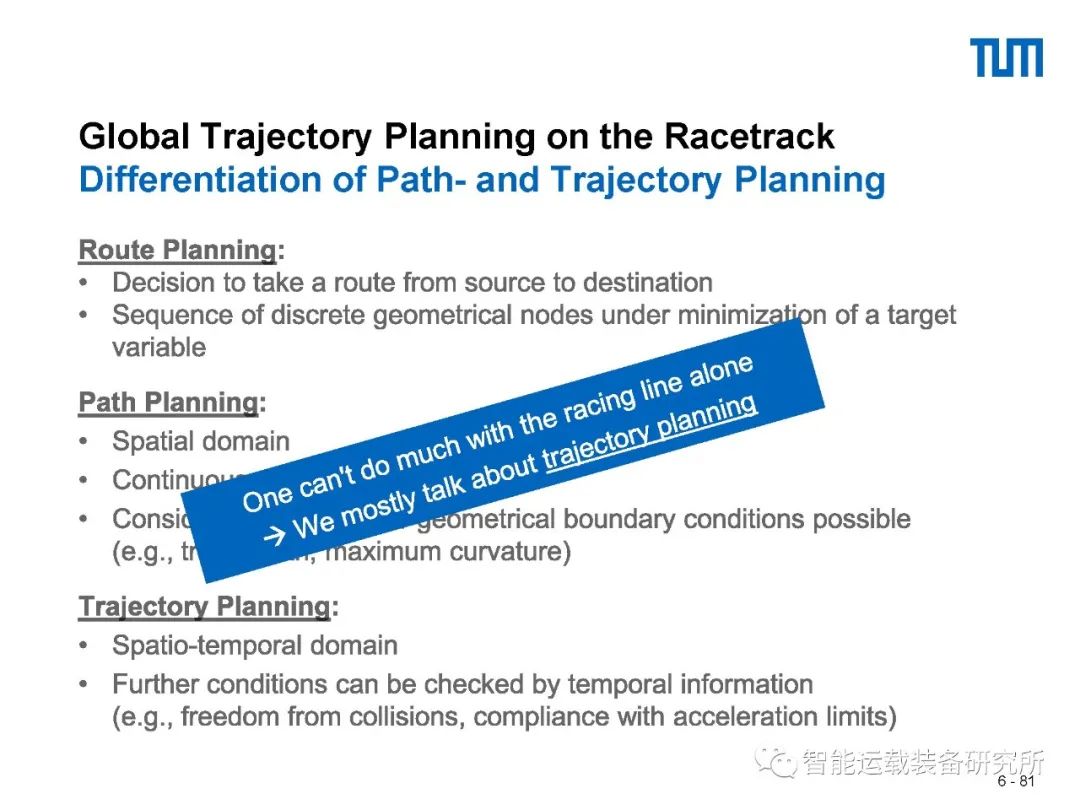
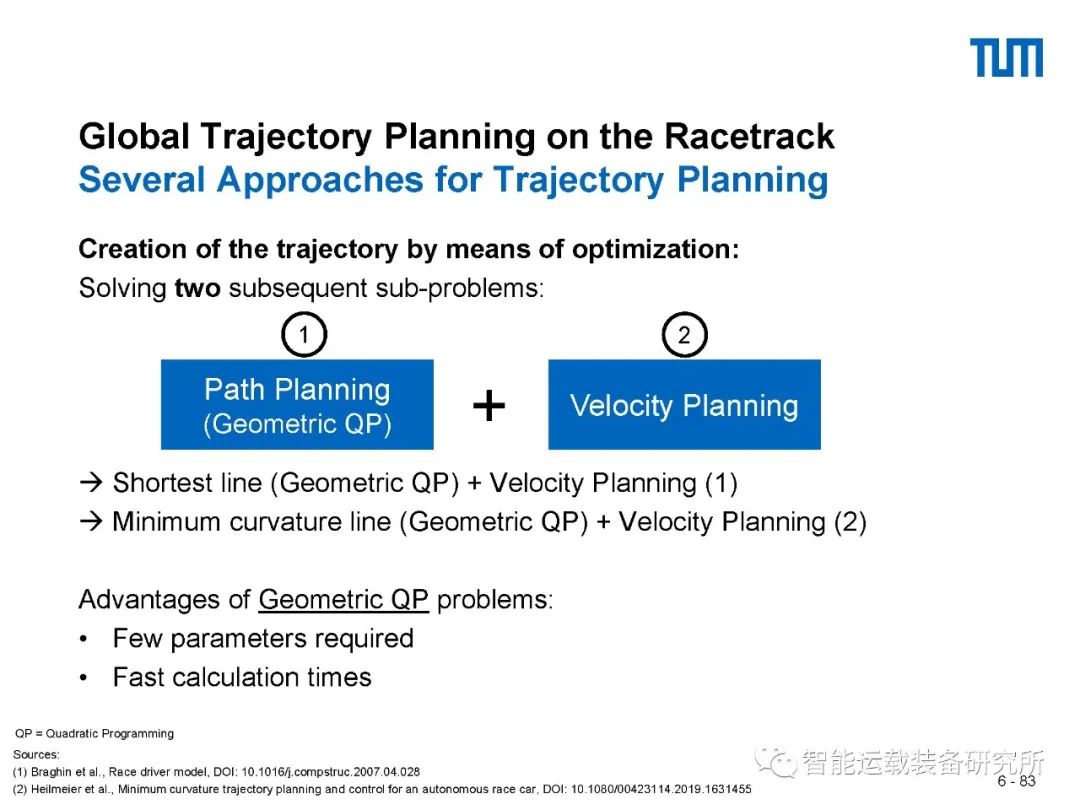
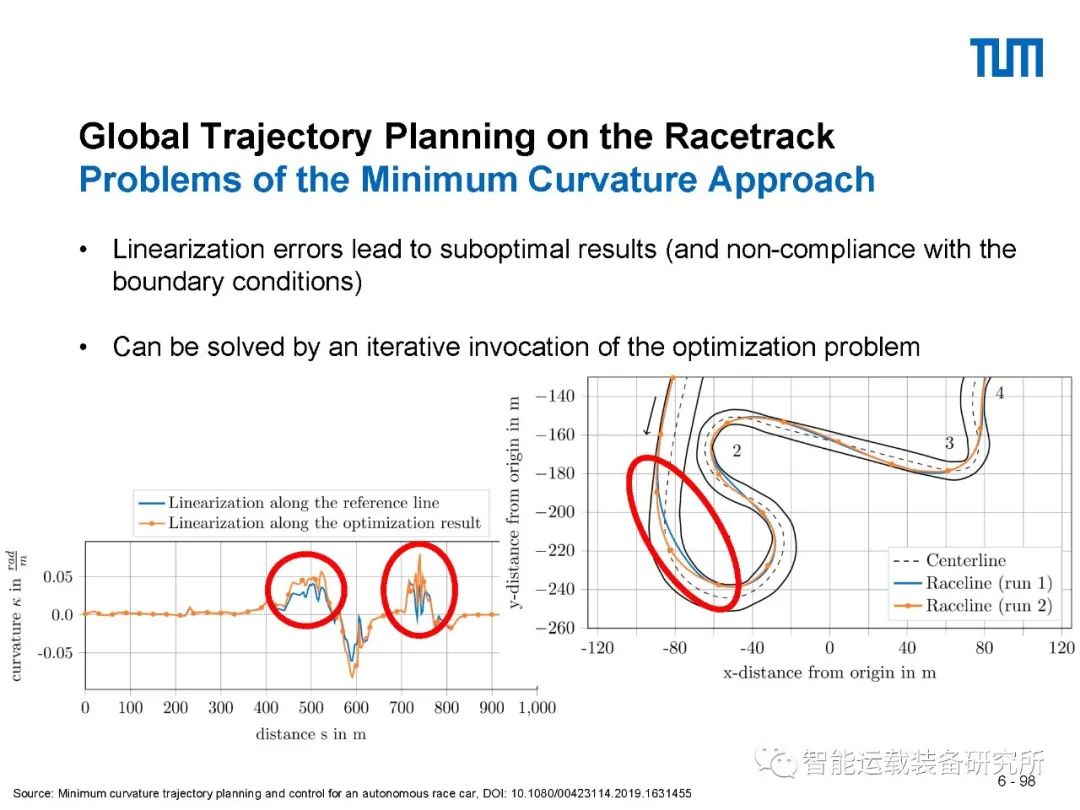
全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。通常全局路径规划的实现包括Dijikstra算法,A*算法,RRT算法等经典算法,也包括蚁群算法、遗传算法等智能算法;
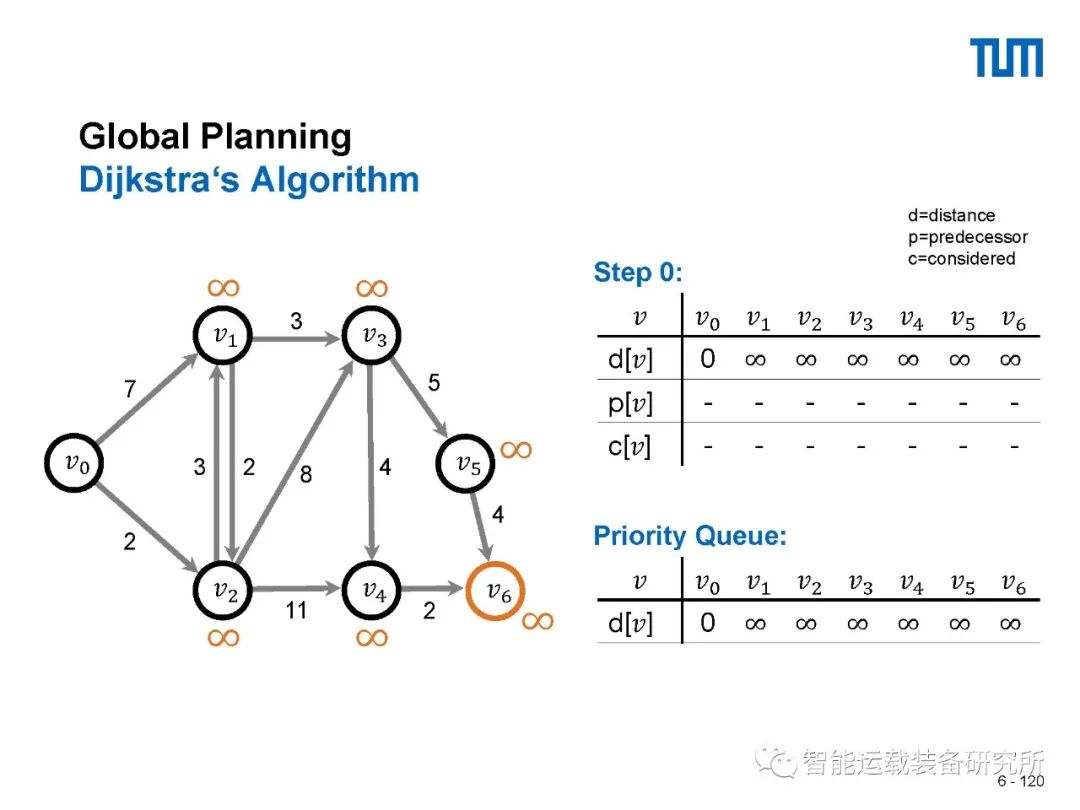
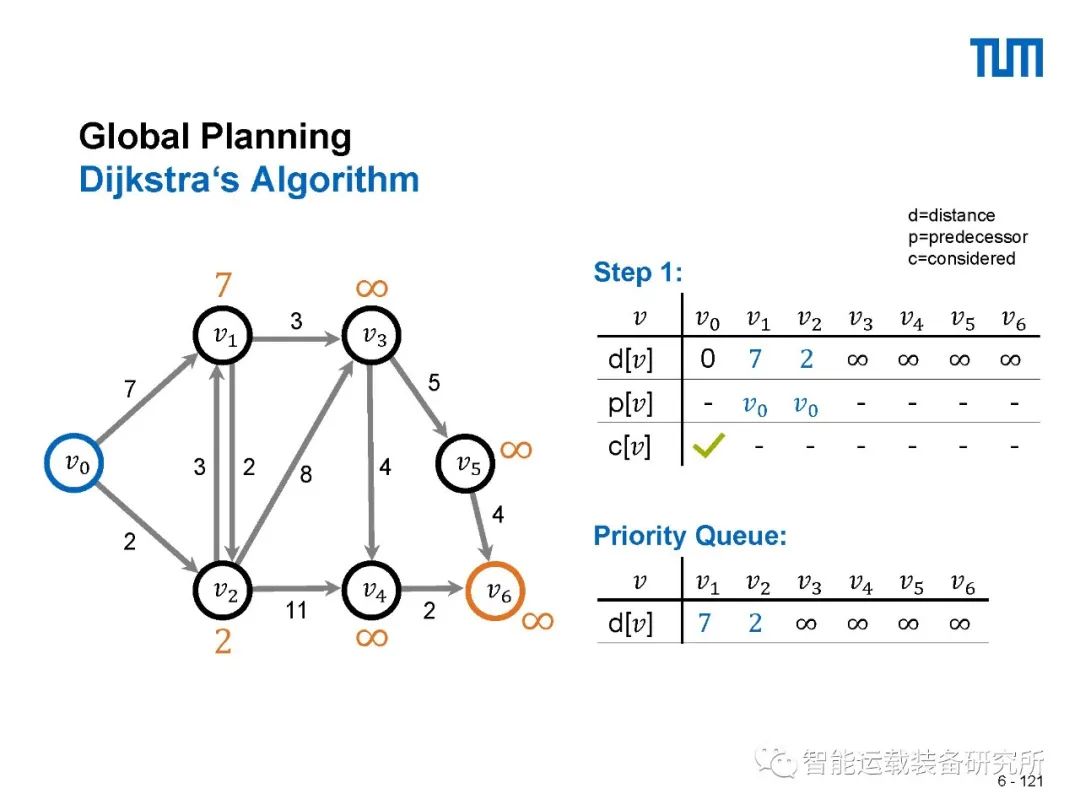
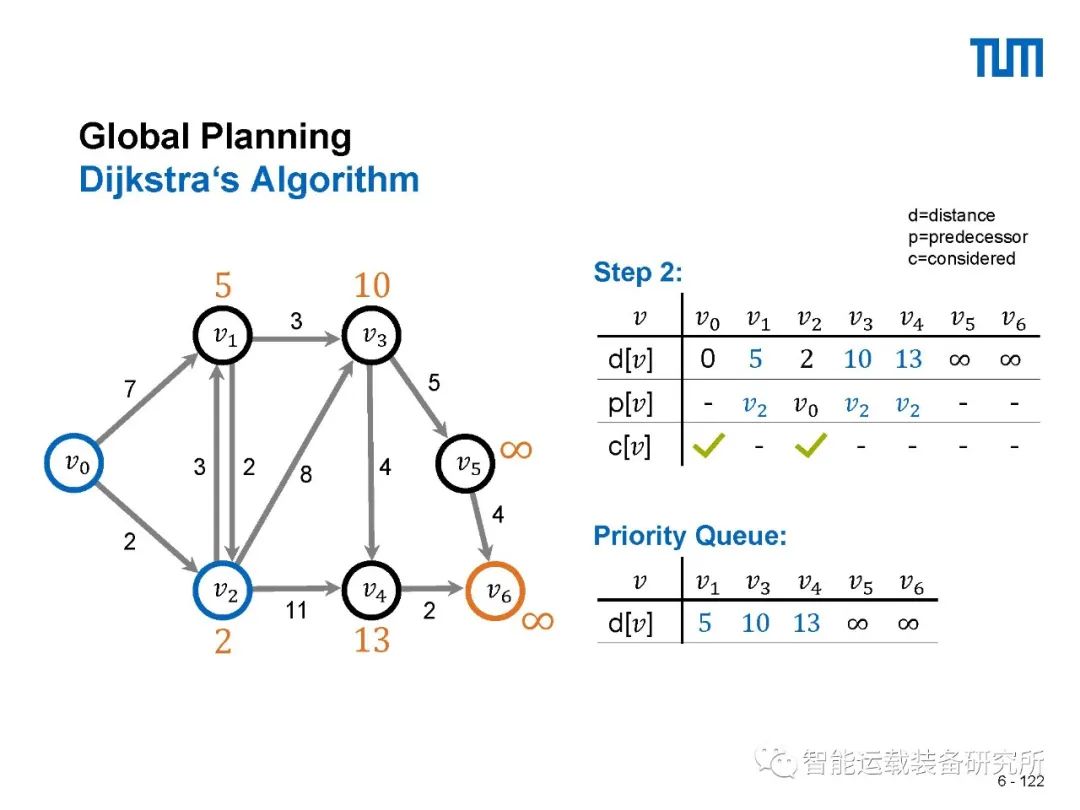
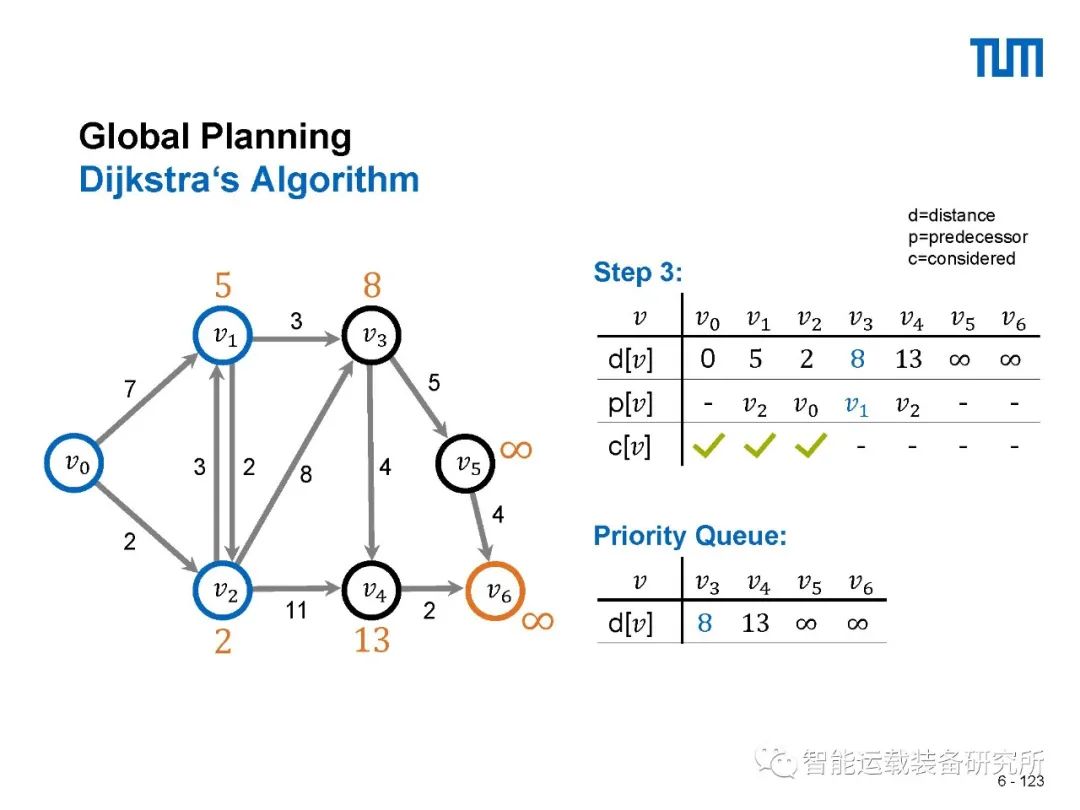
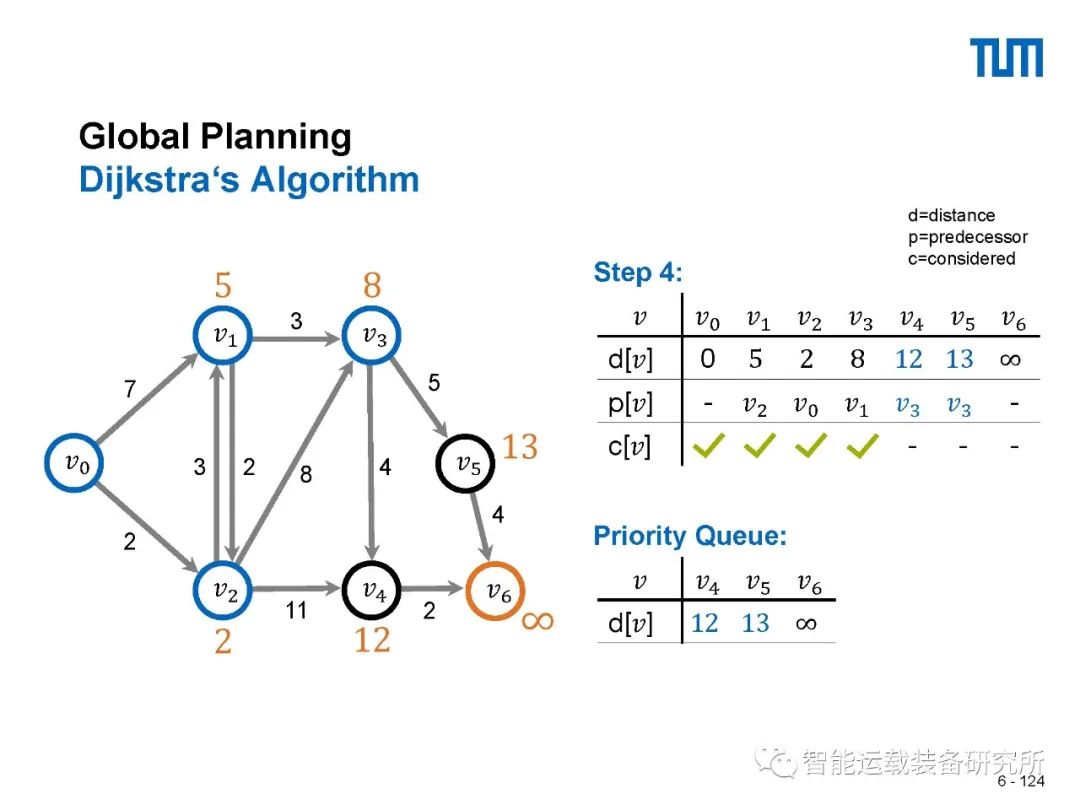
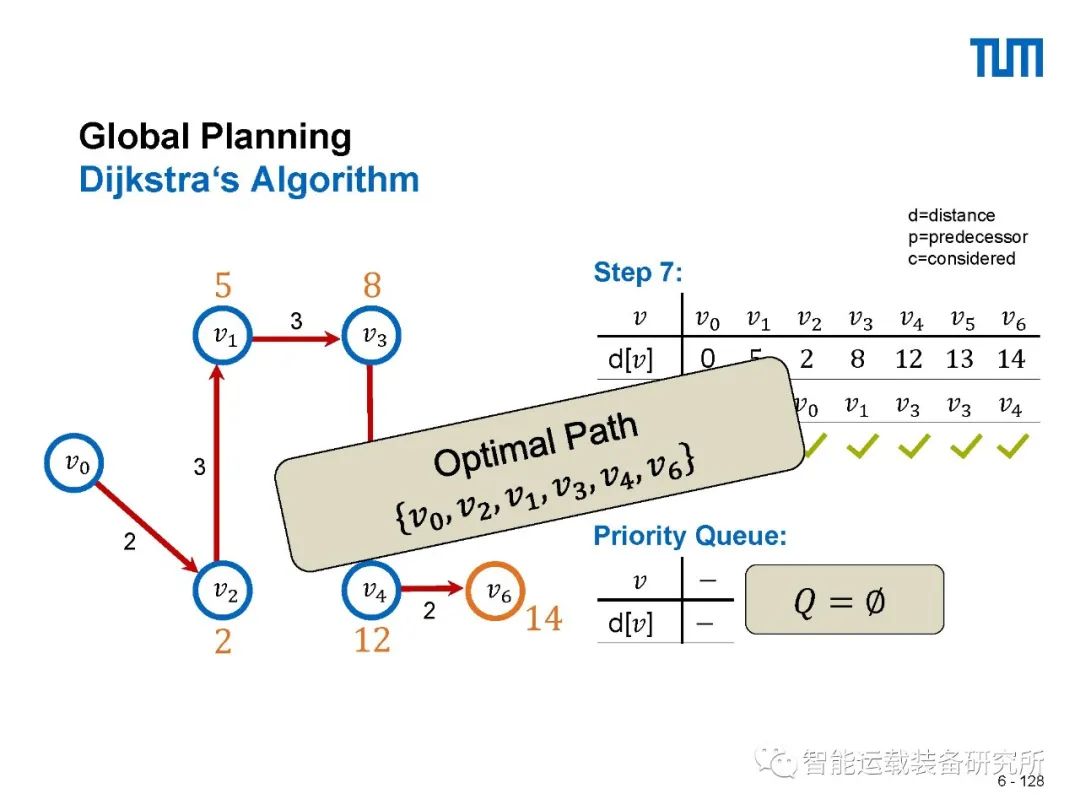
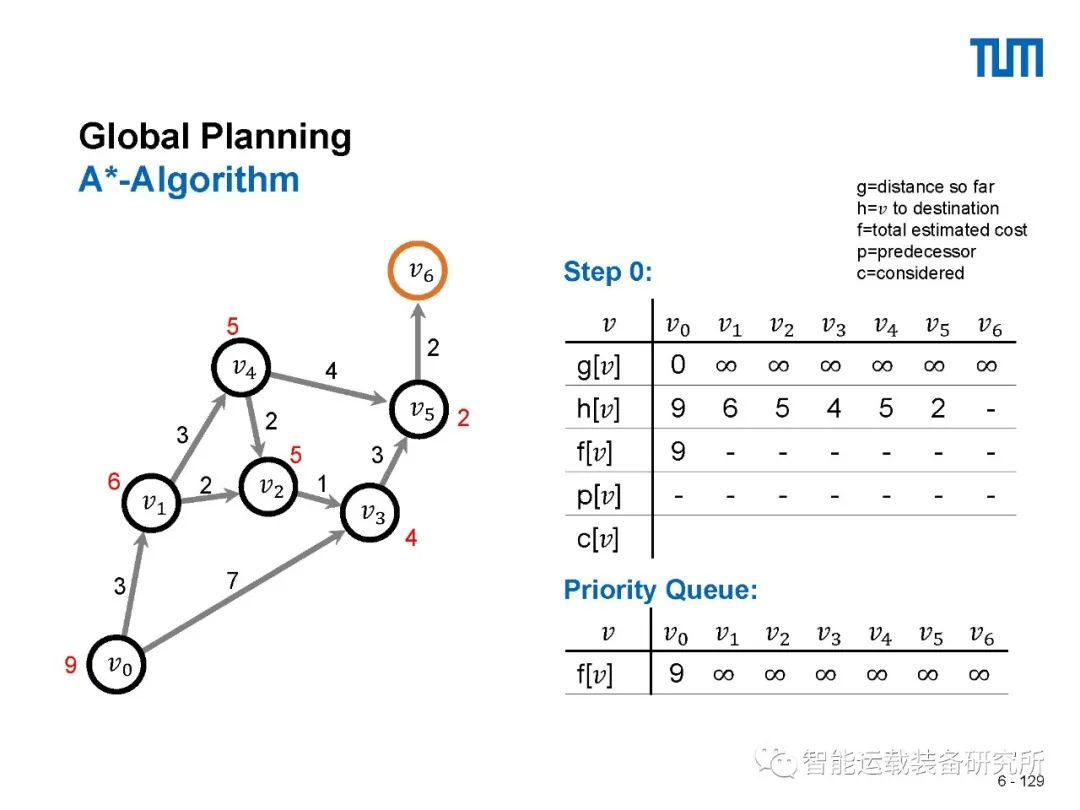
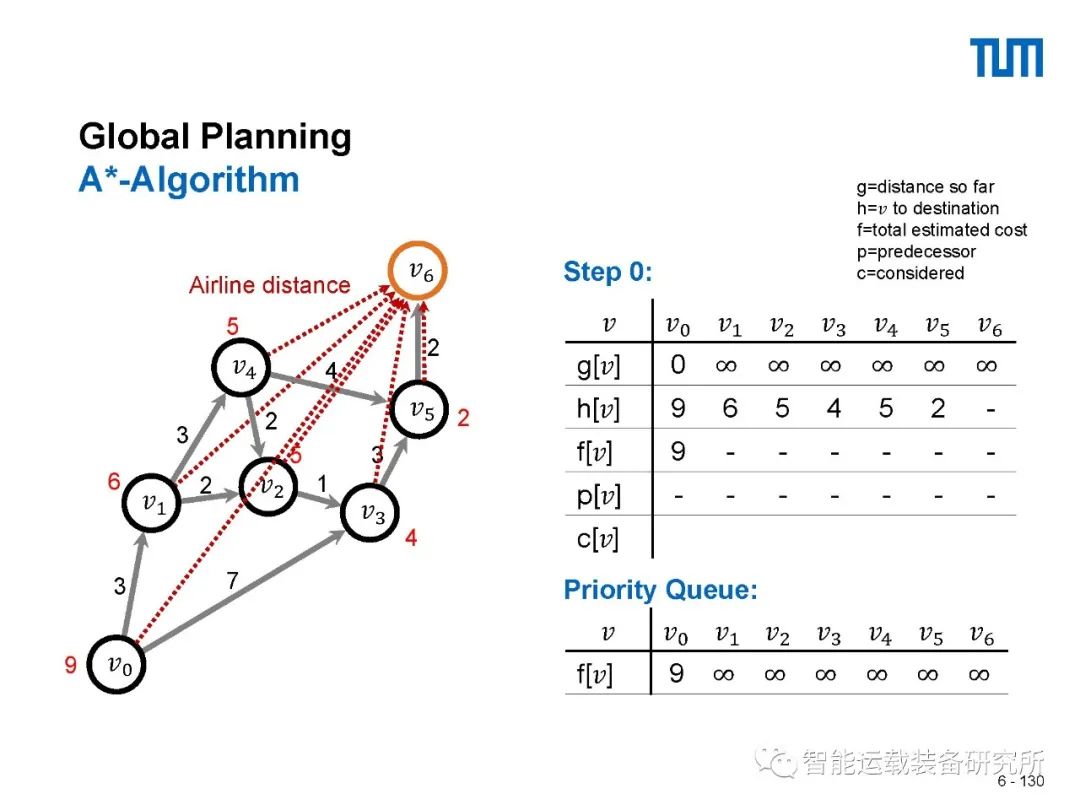
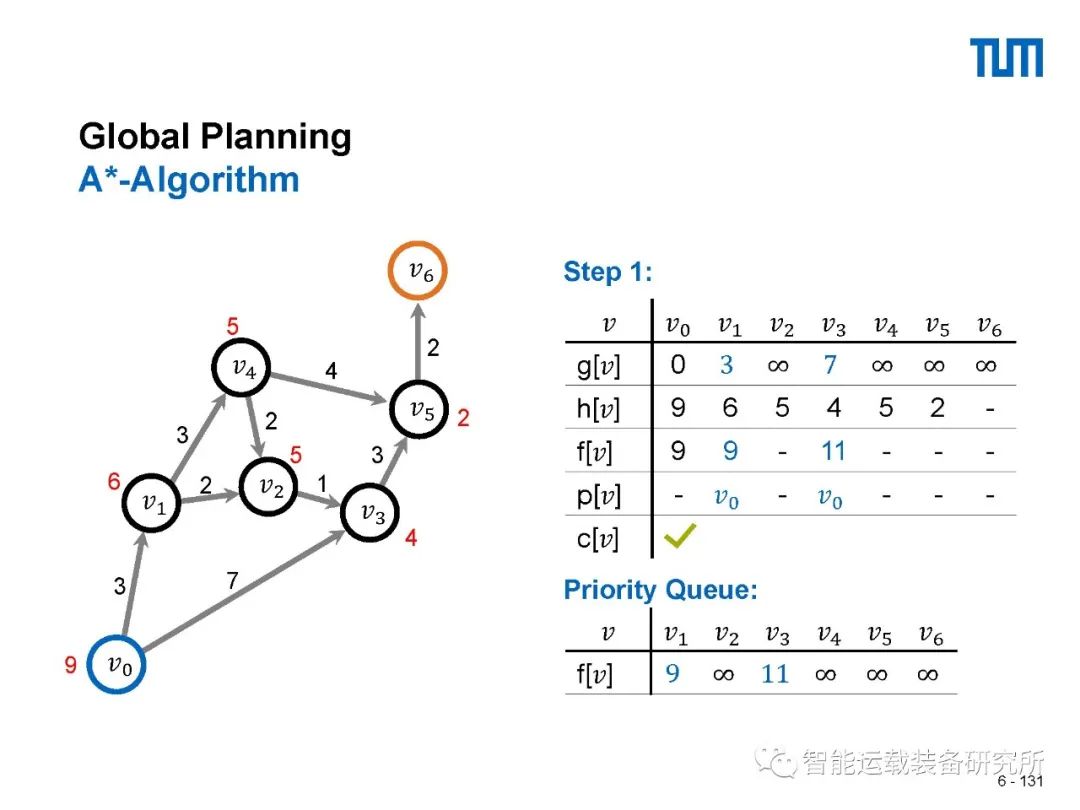
1. Dijkstra算法和A*算法
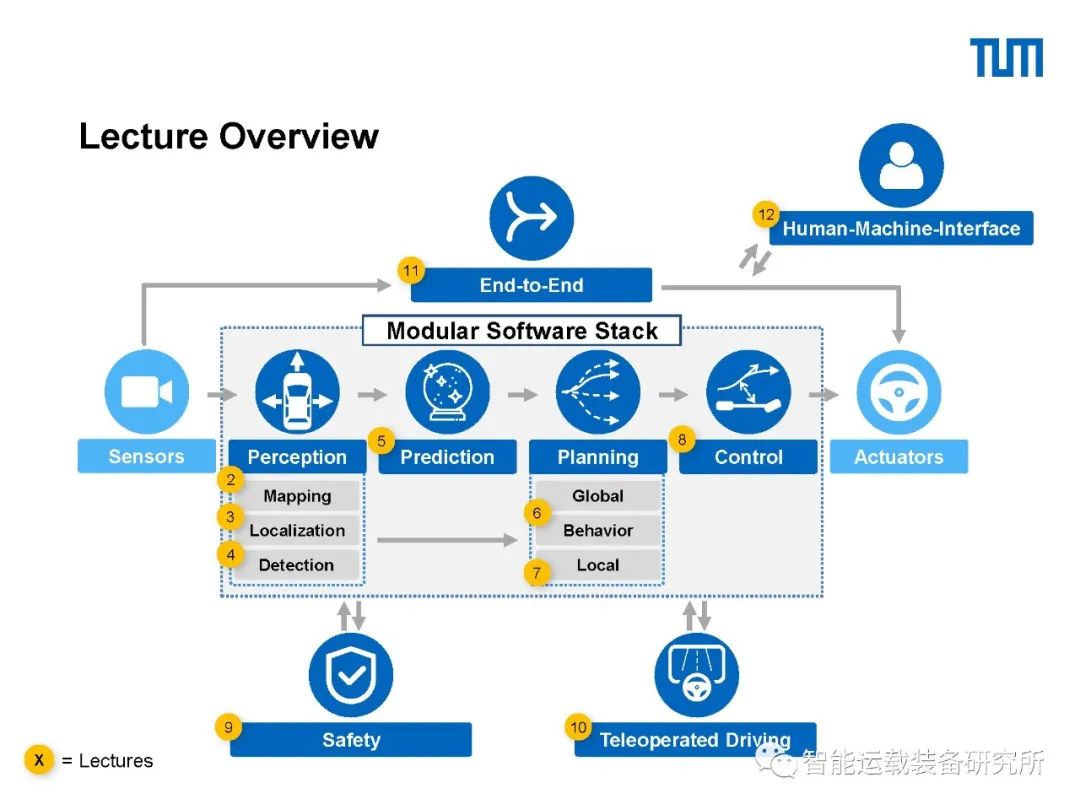

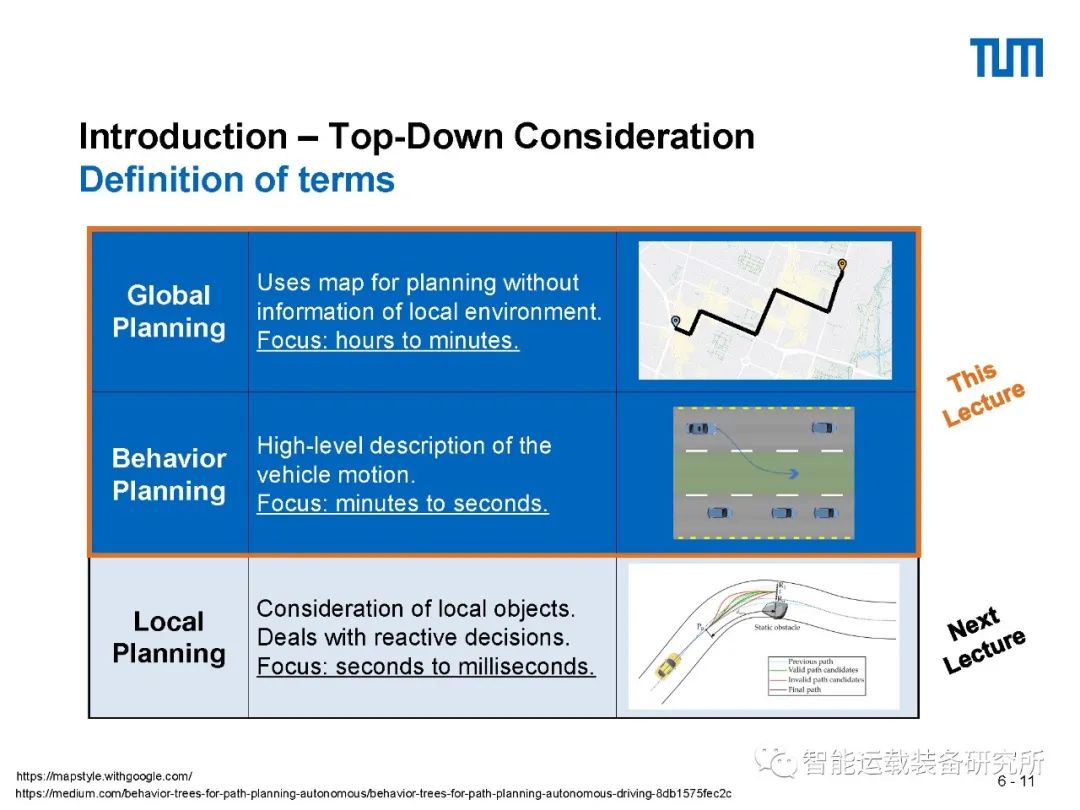
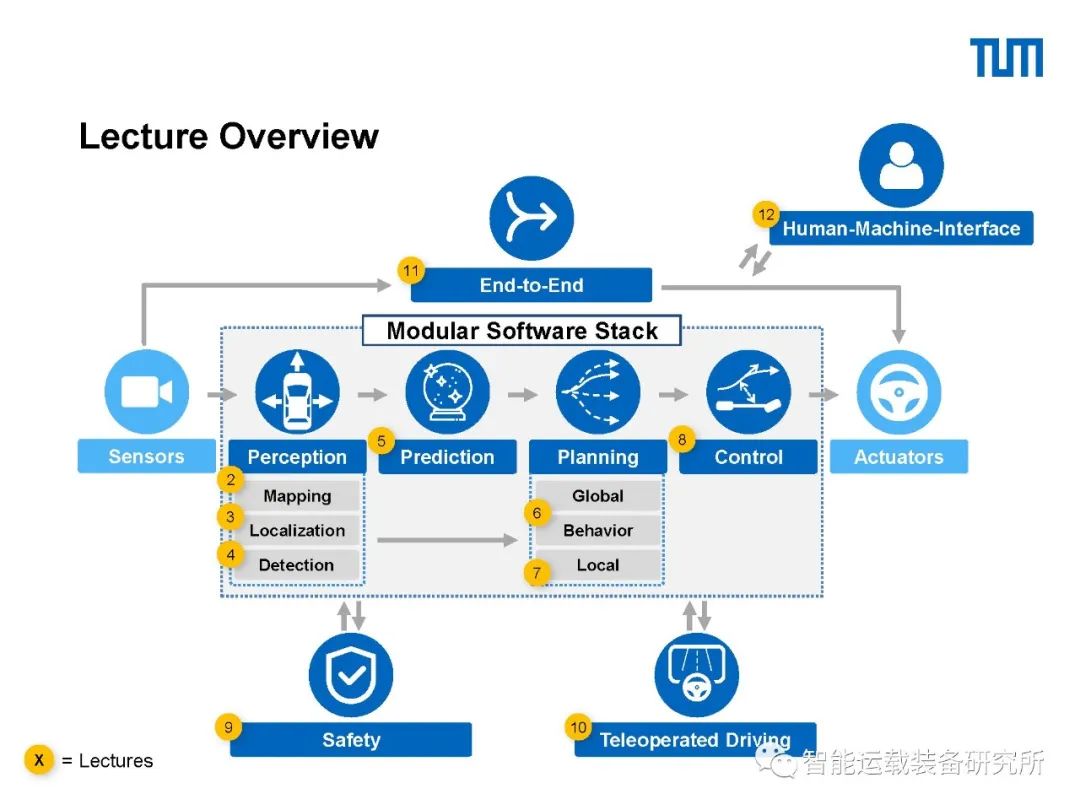
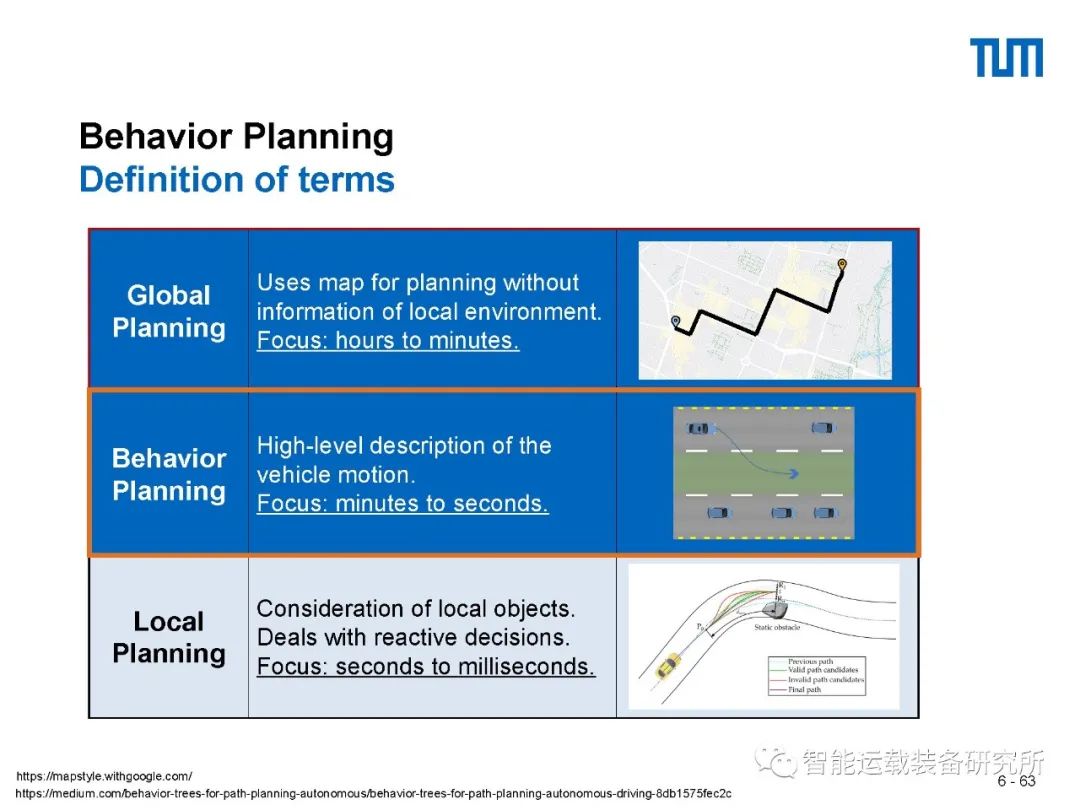
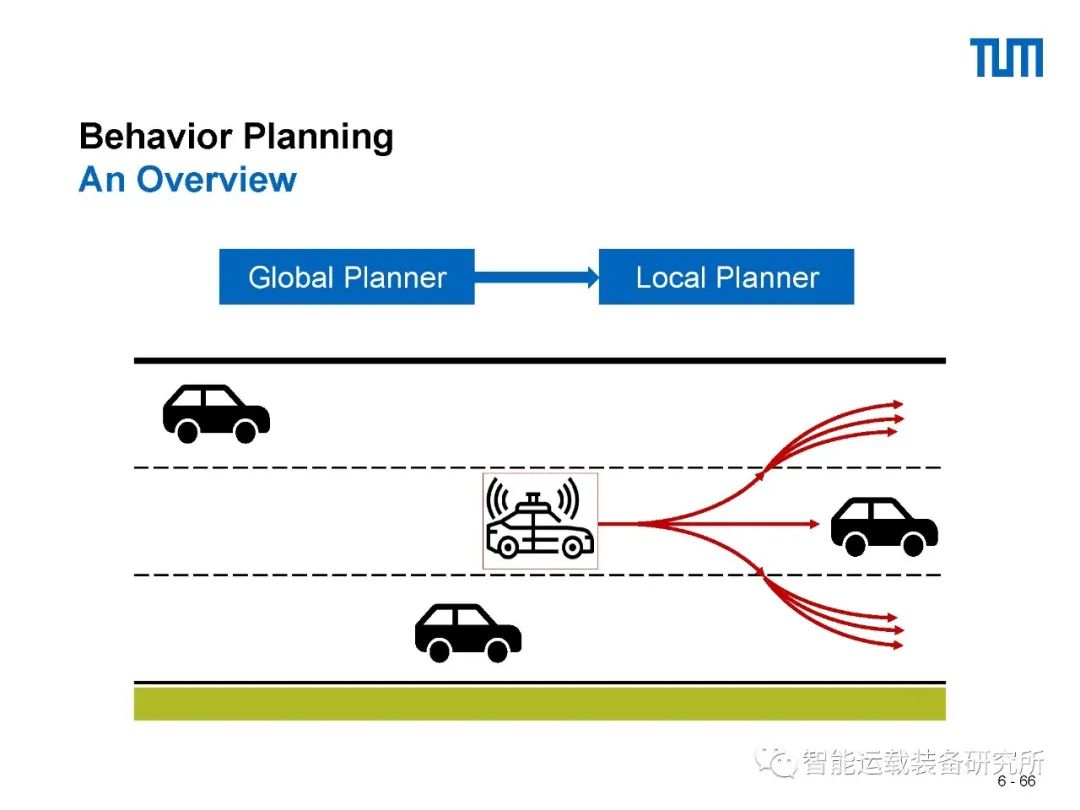
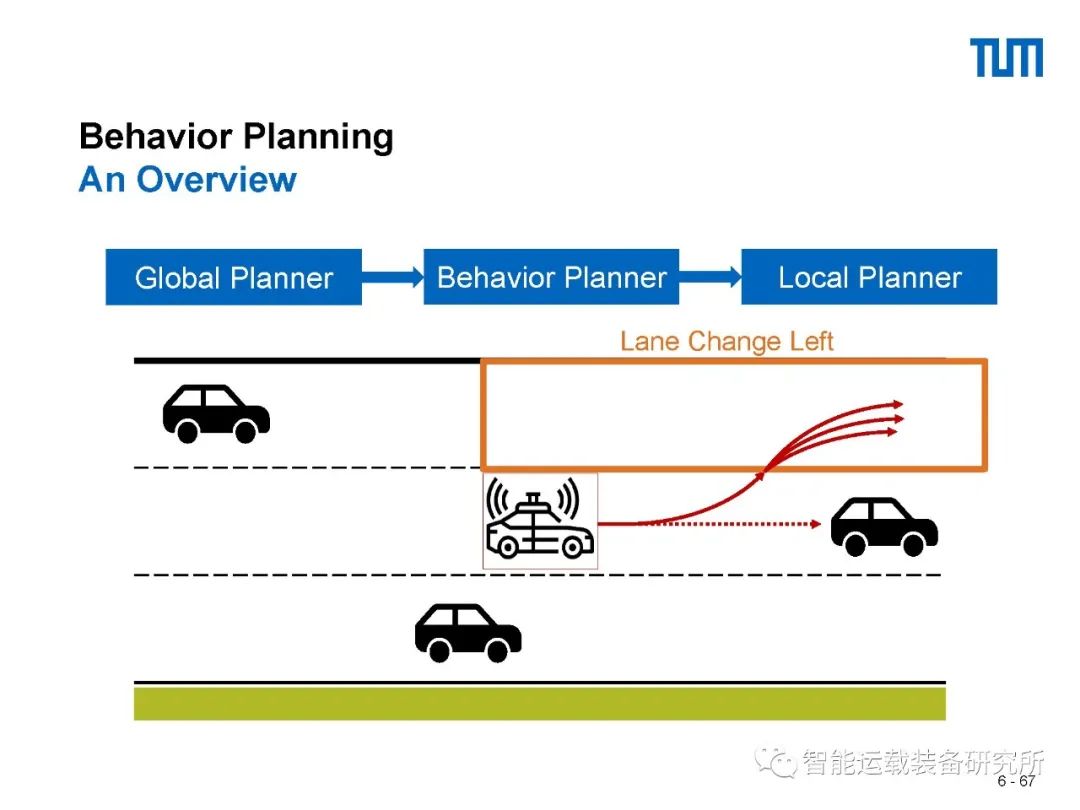
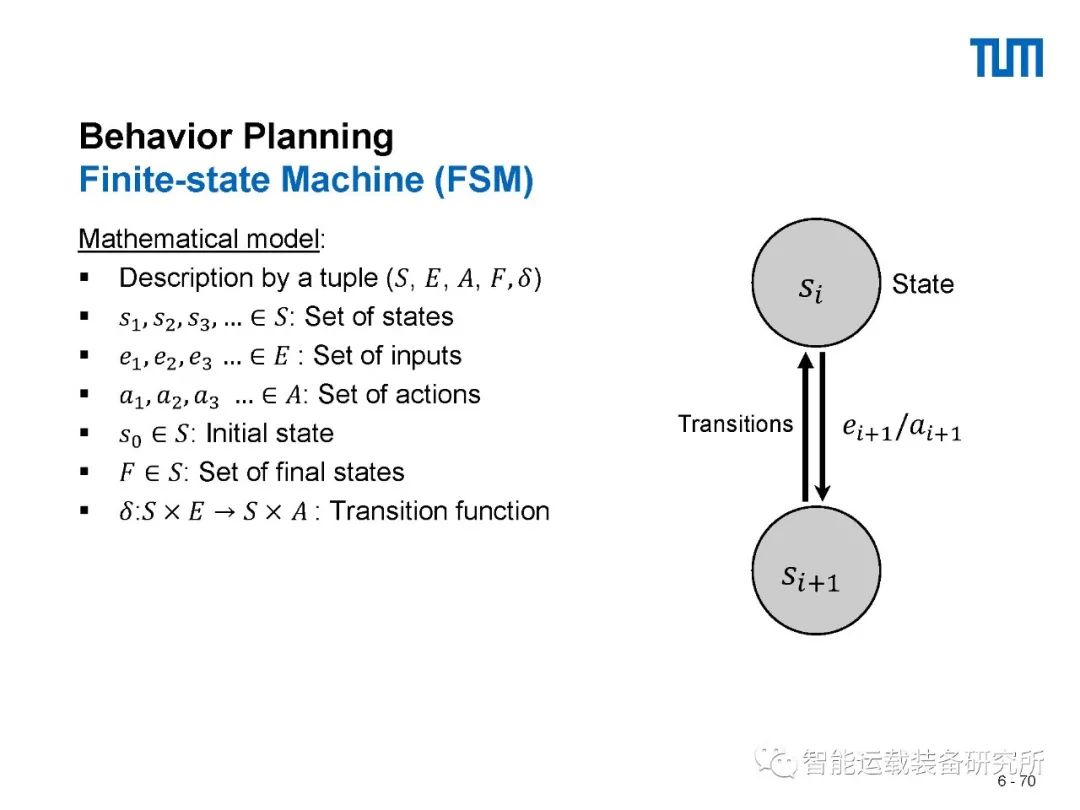
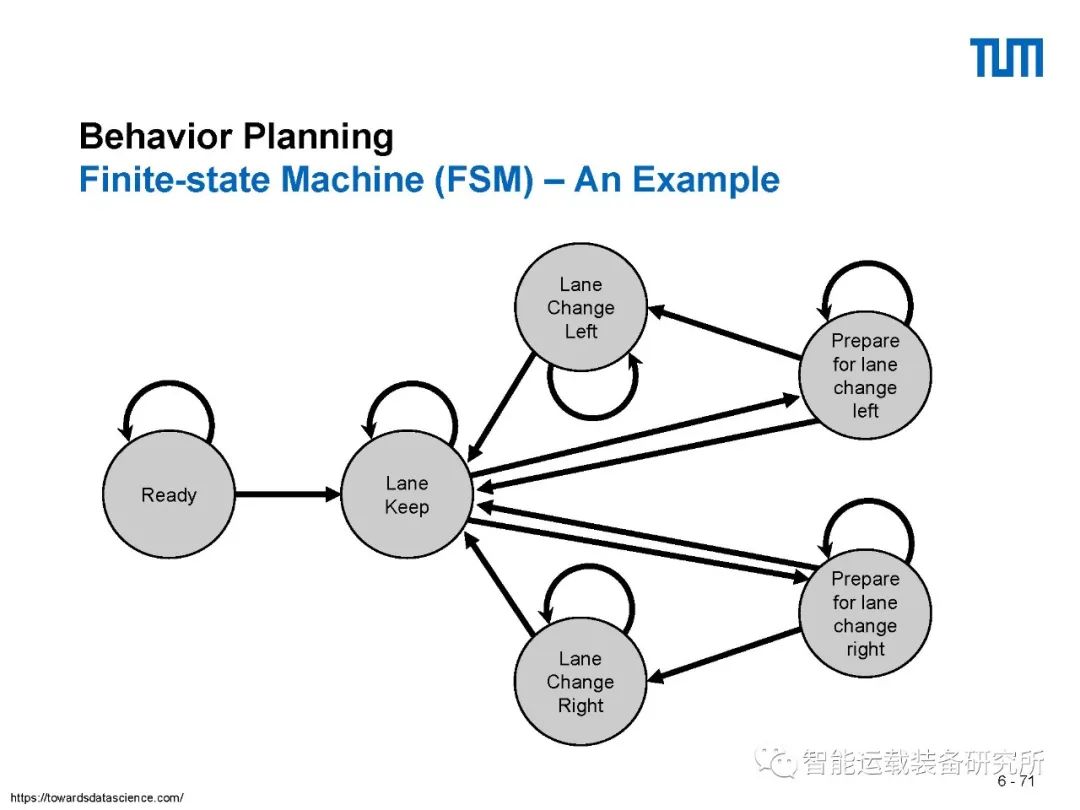
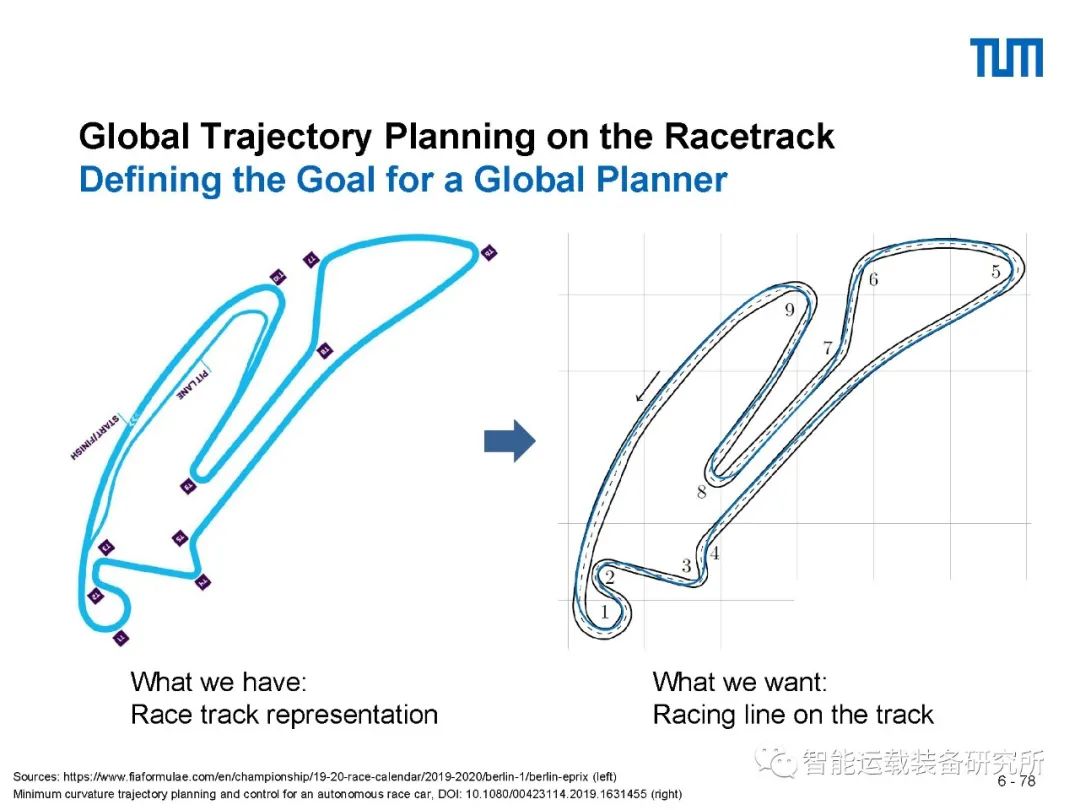
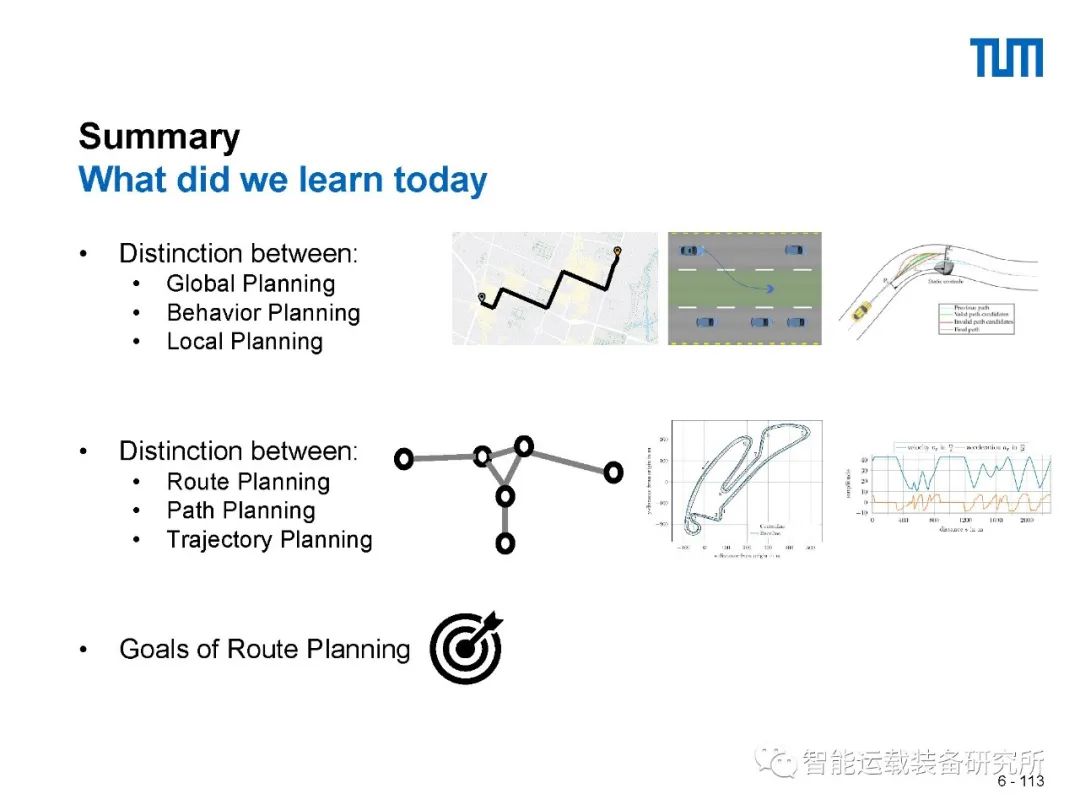
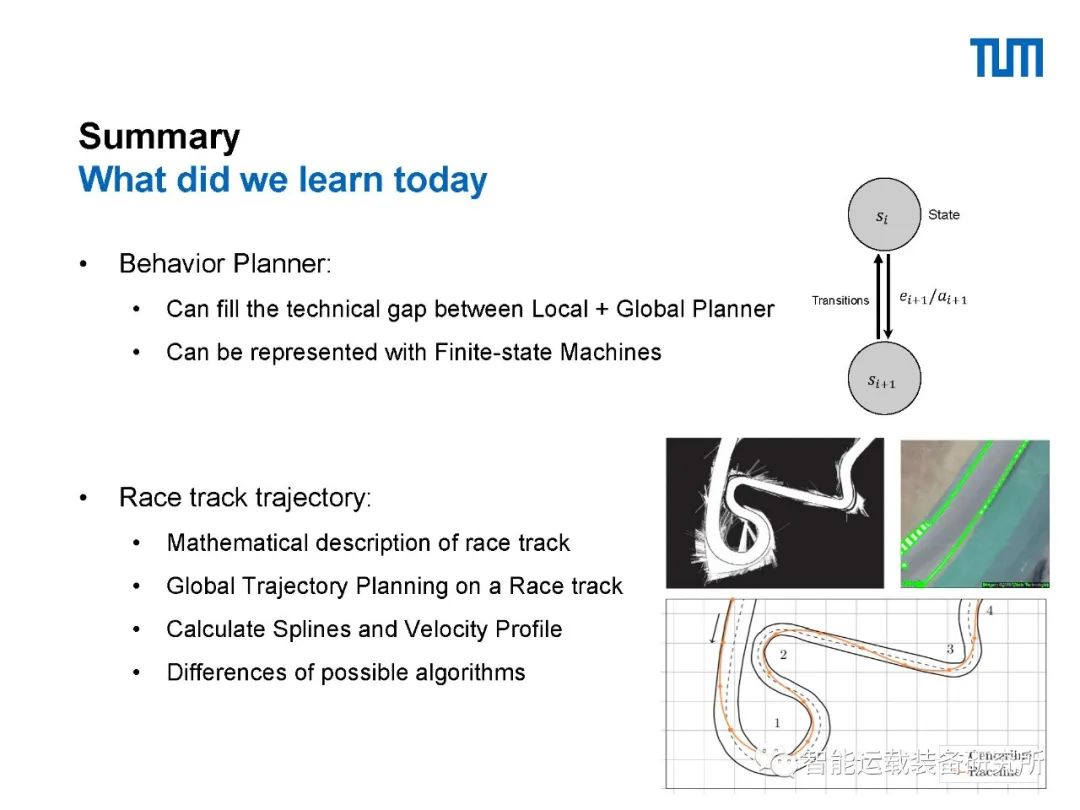
规划主要分为全局规划、局部规划和行为规划

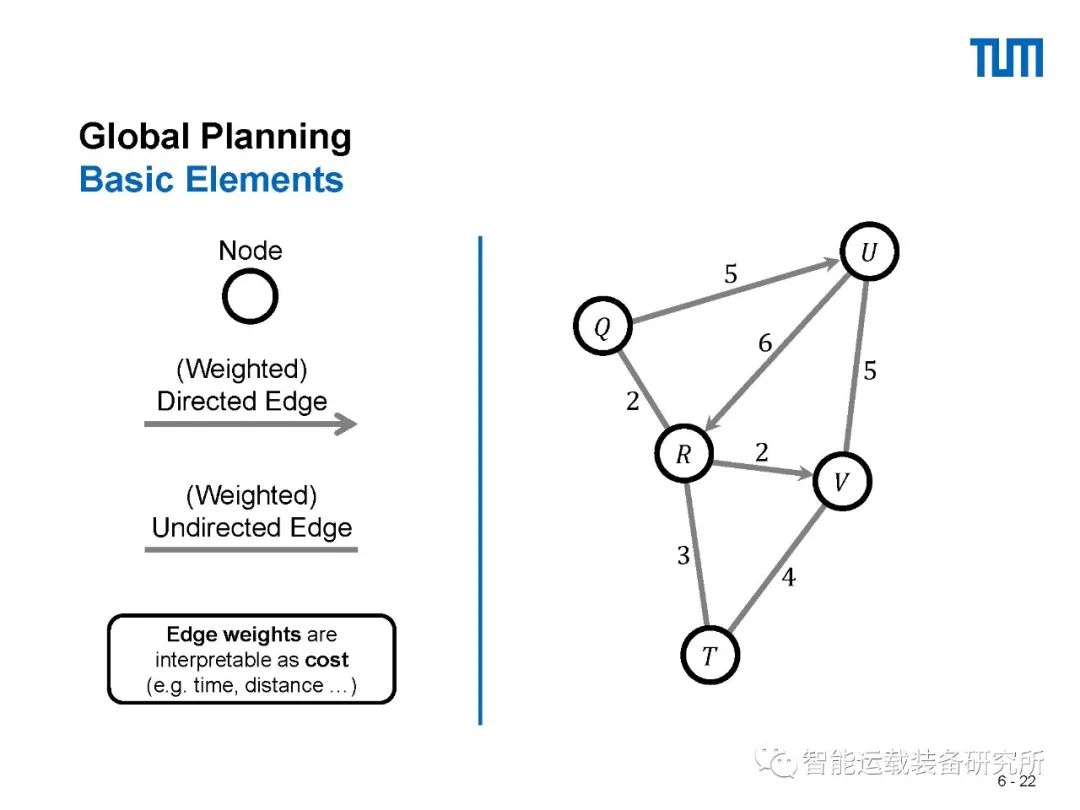
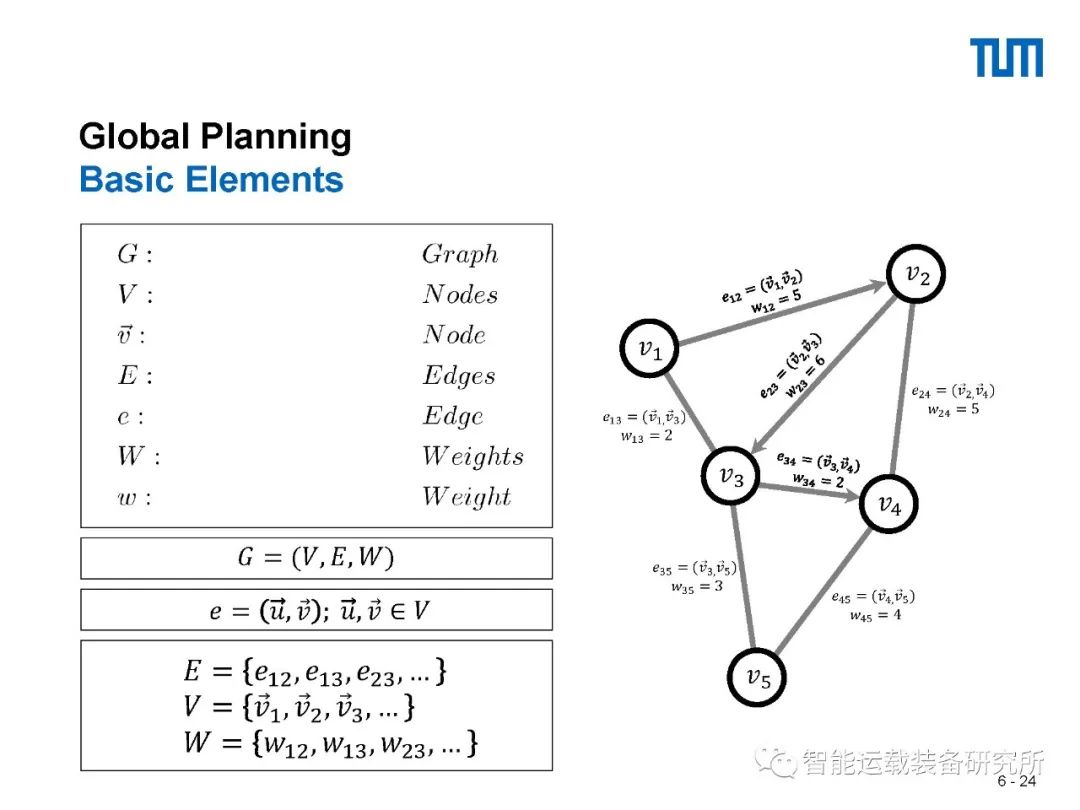
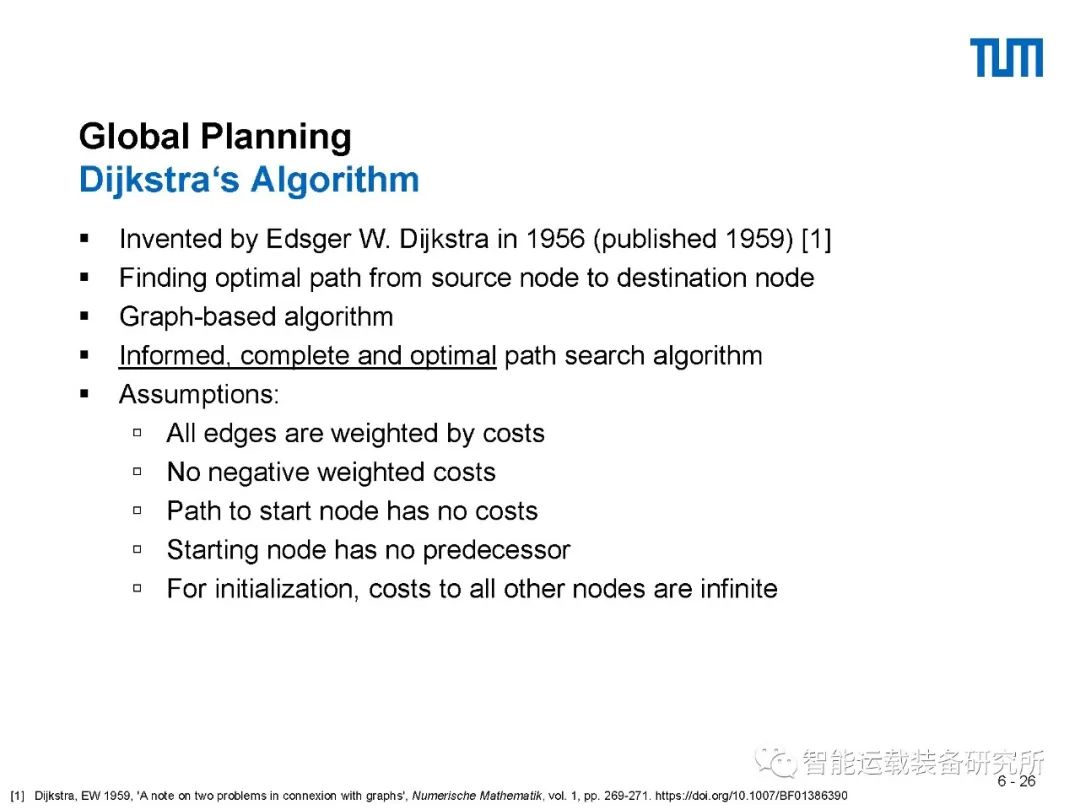
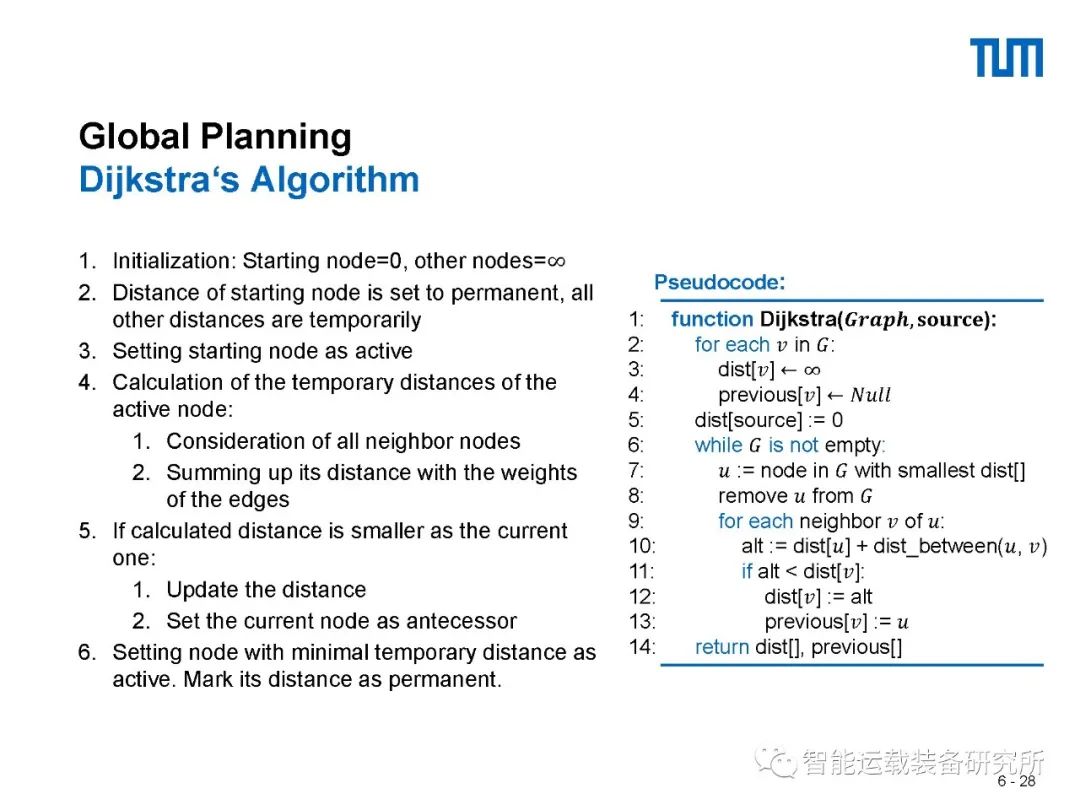
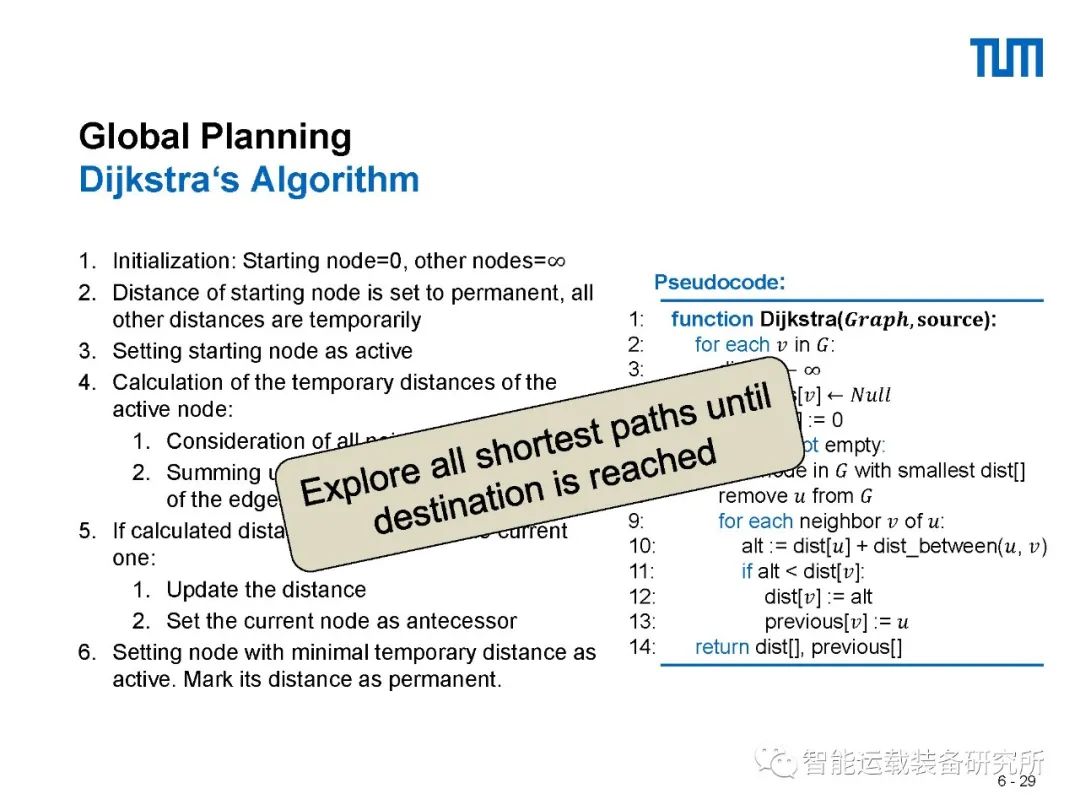
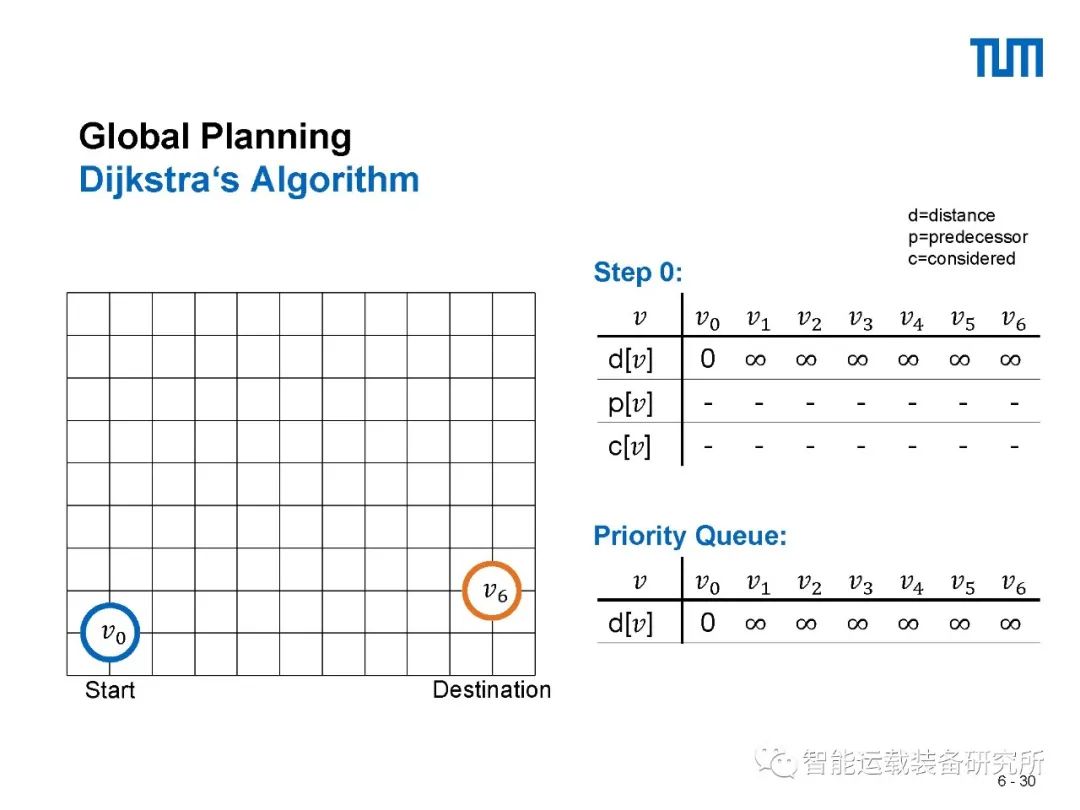
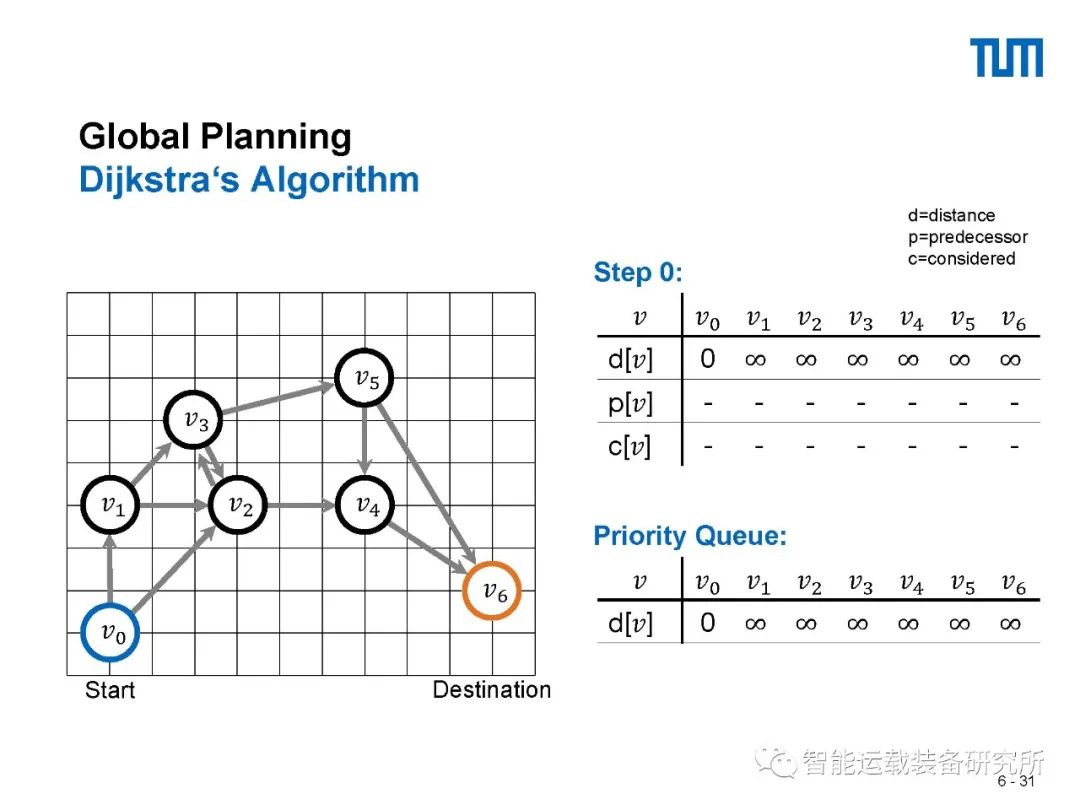
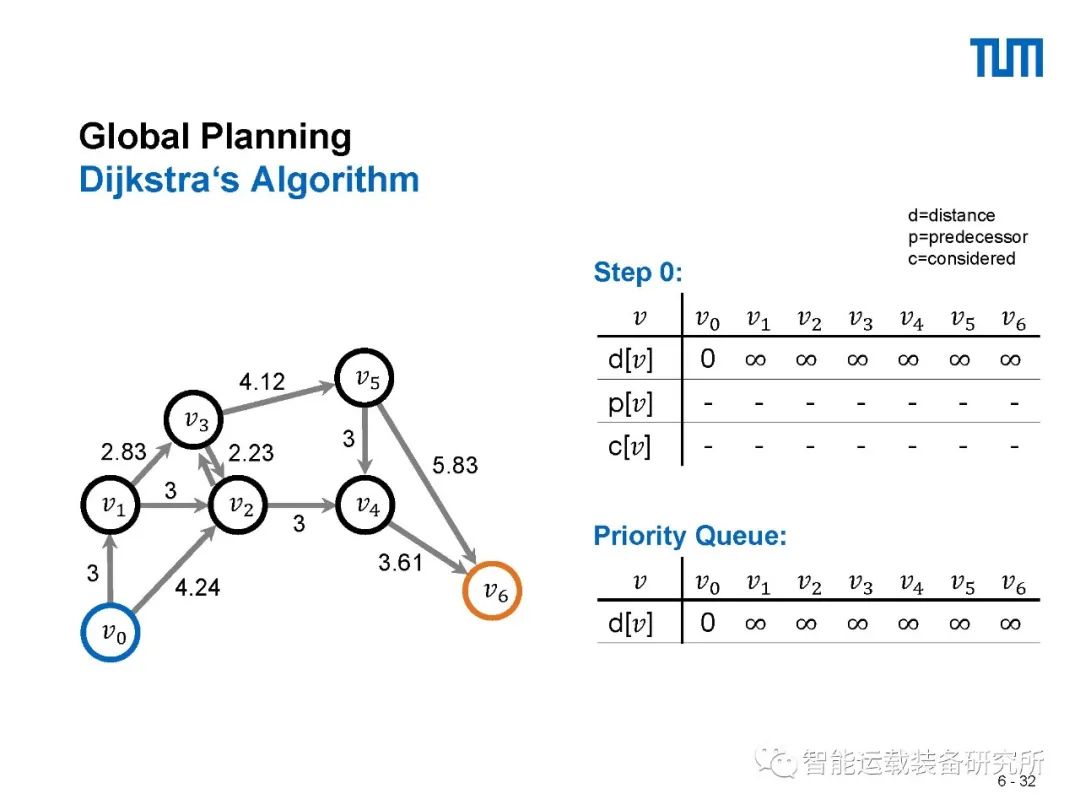
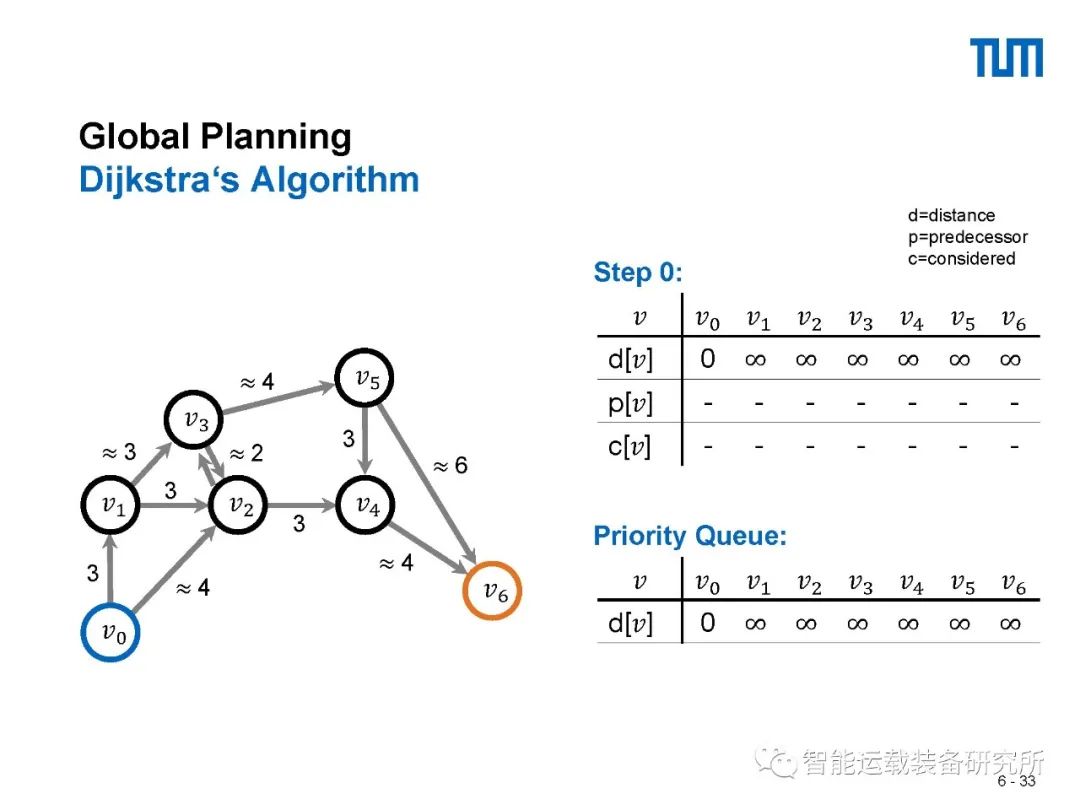
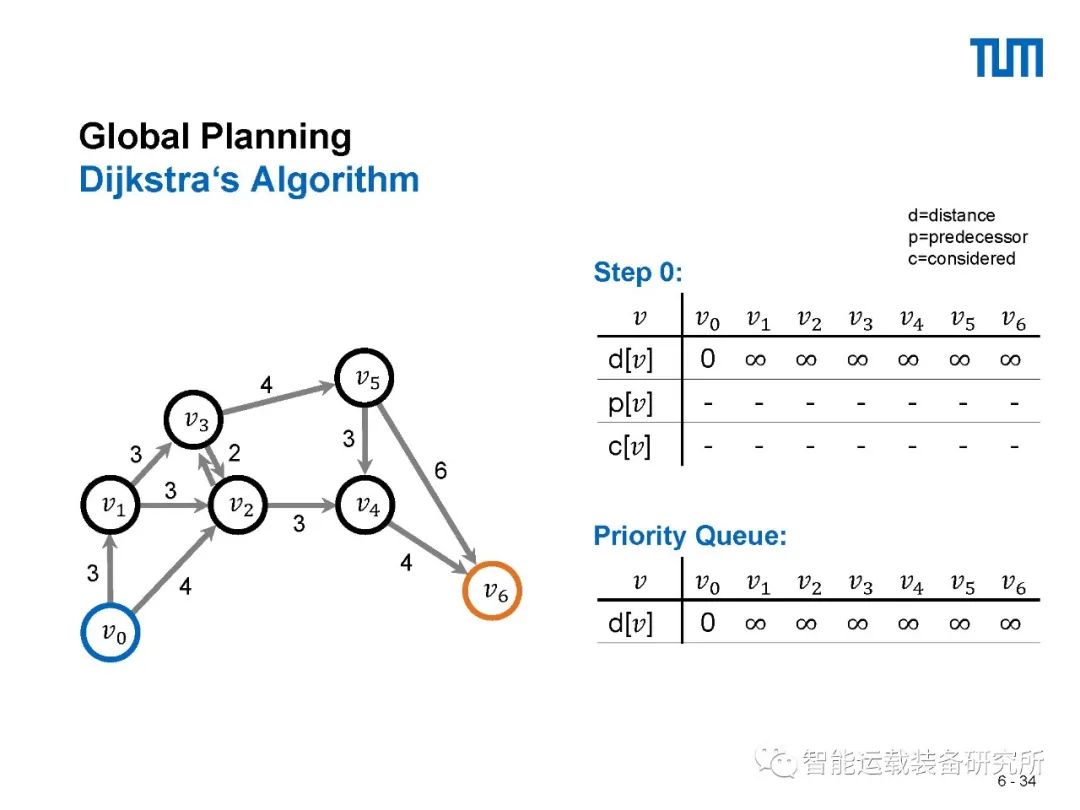
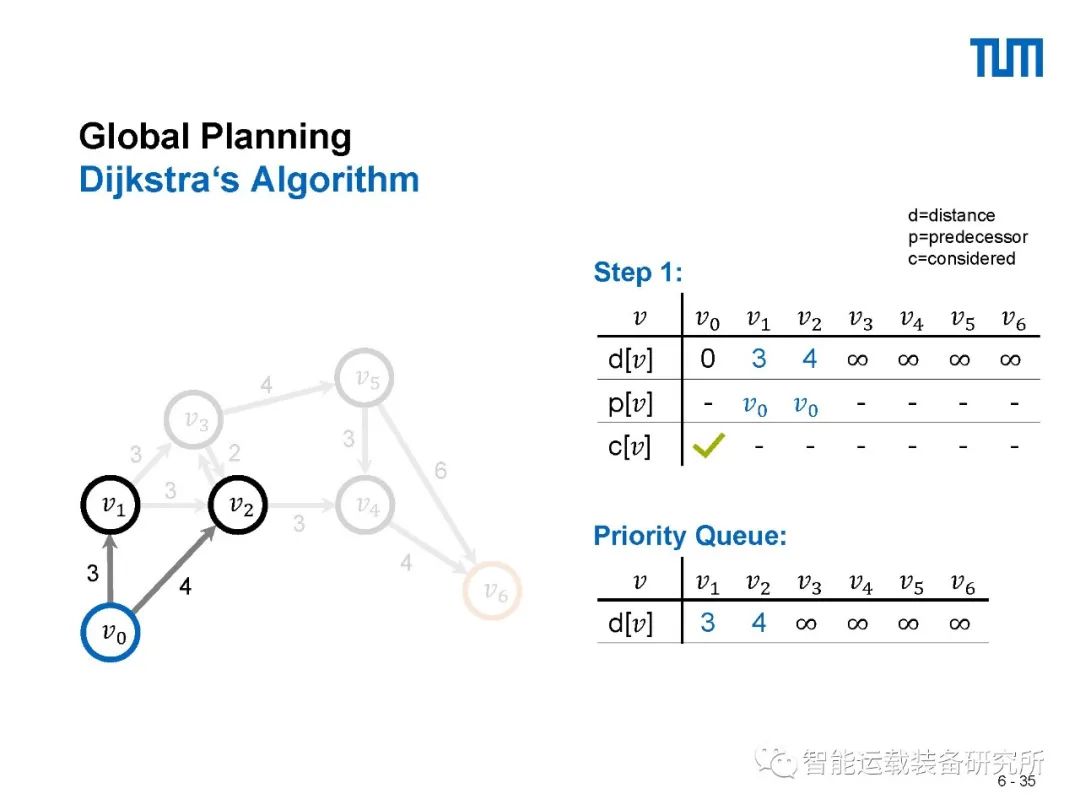
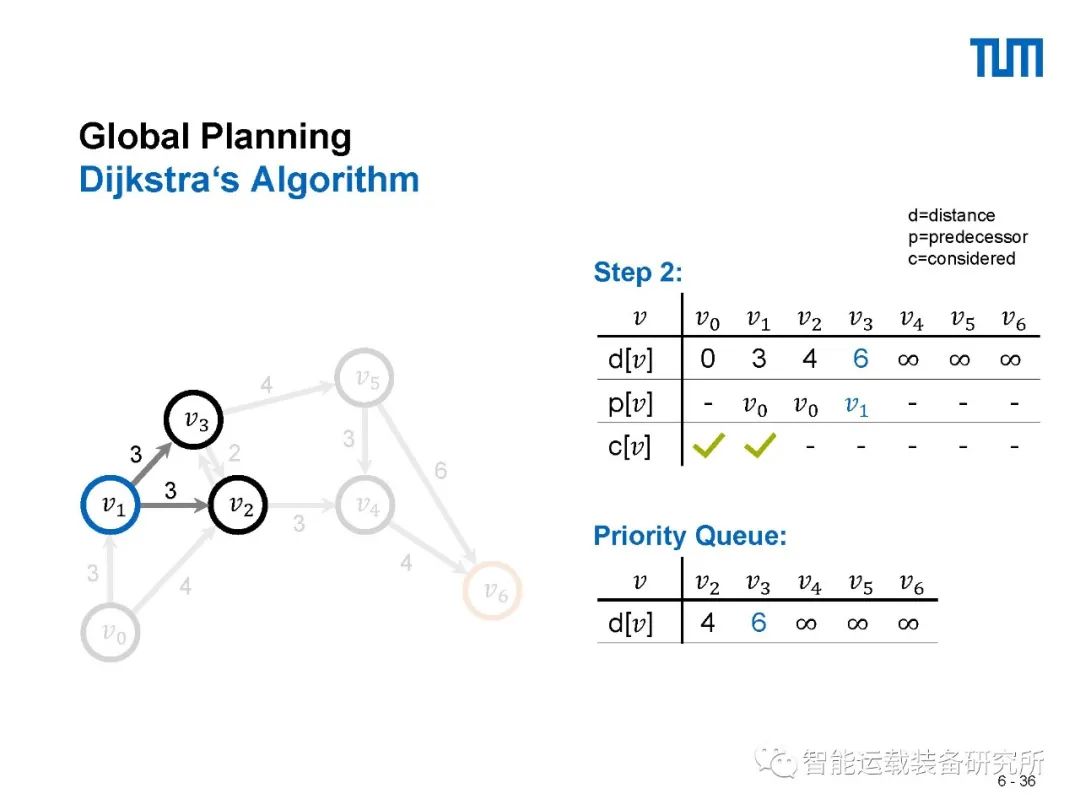
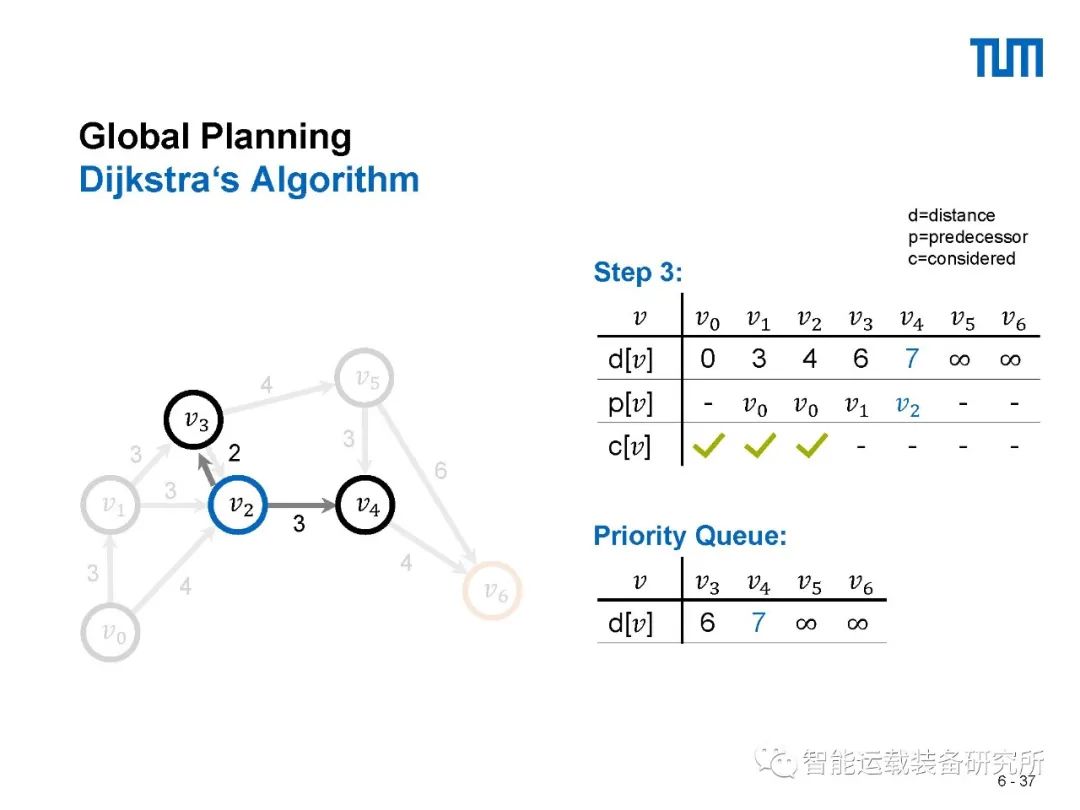
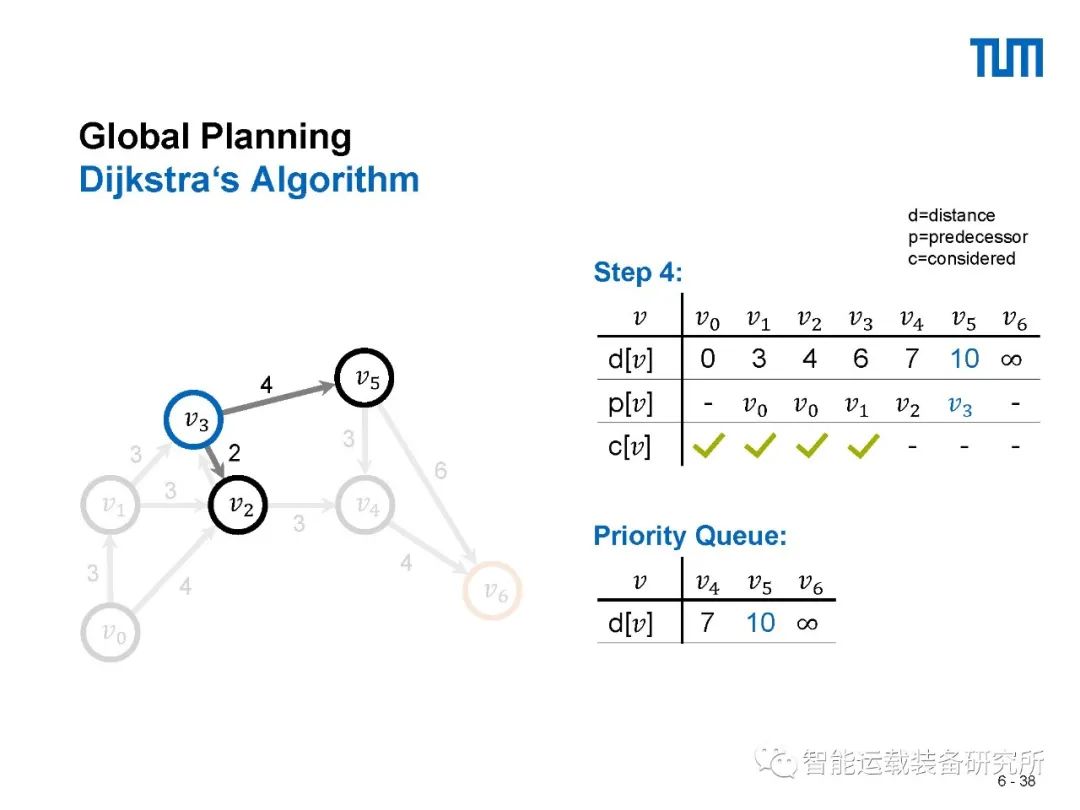
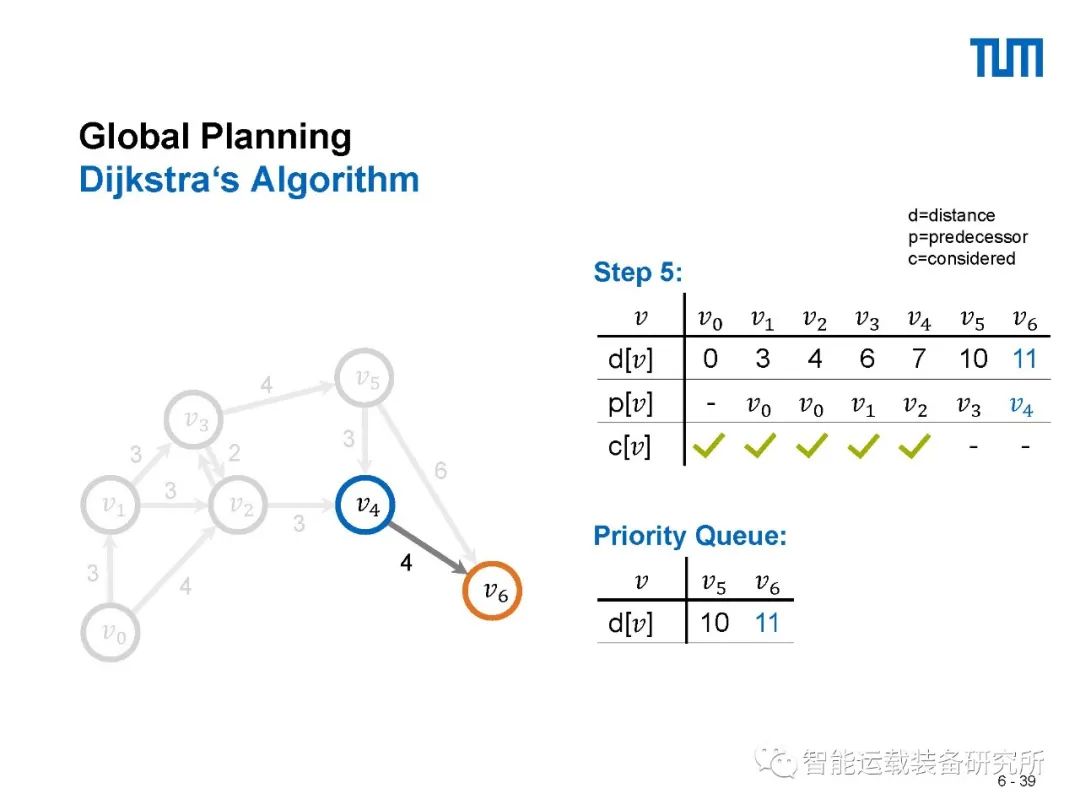
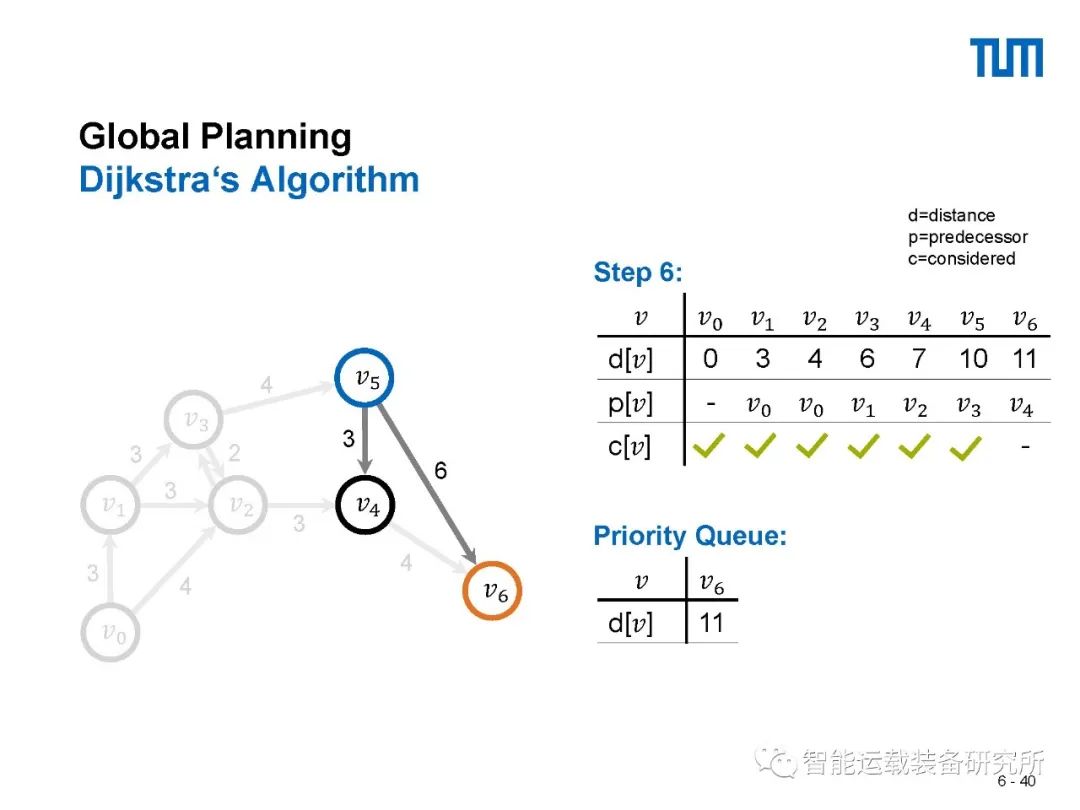
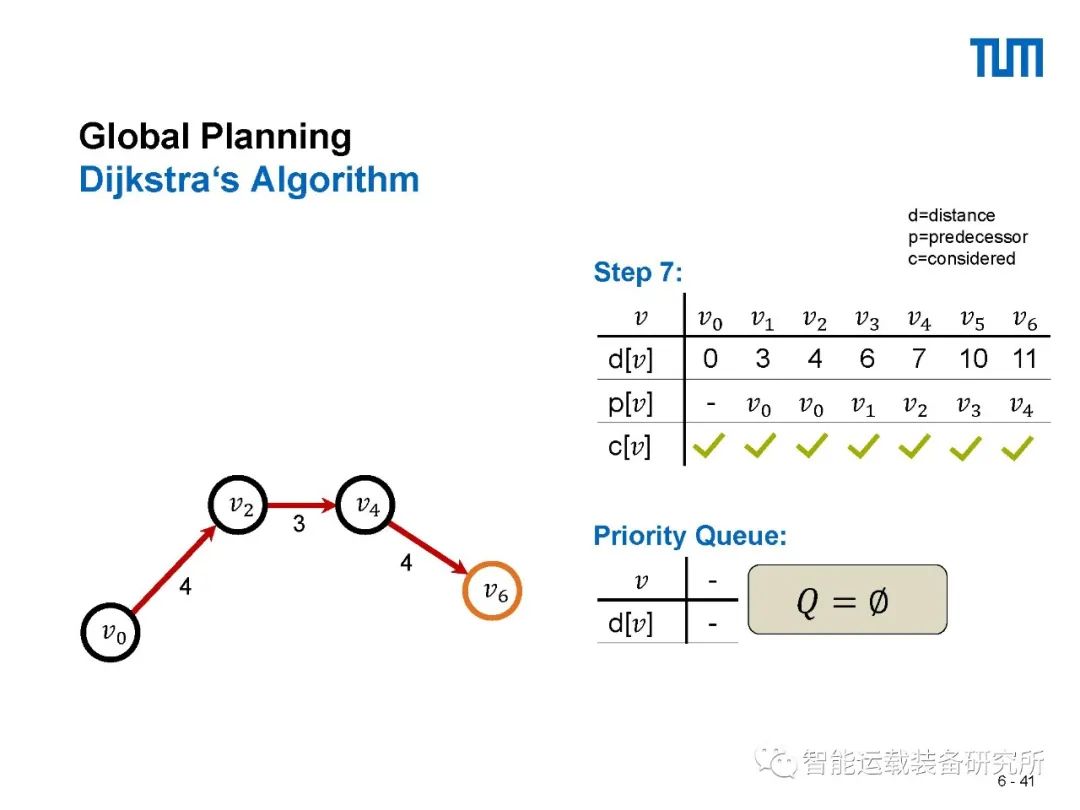
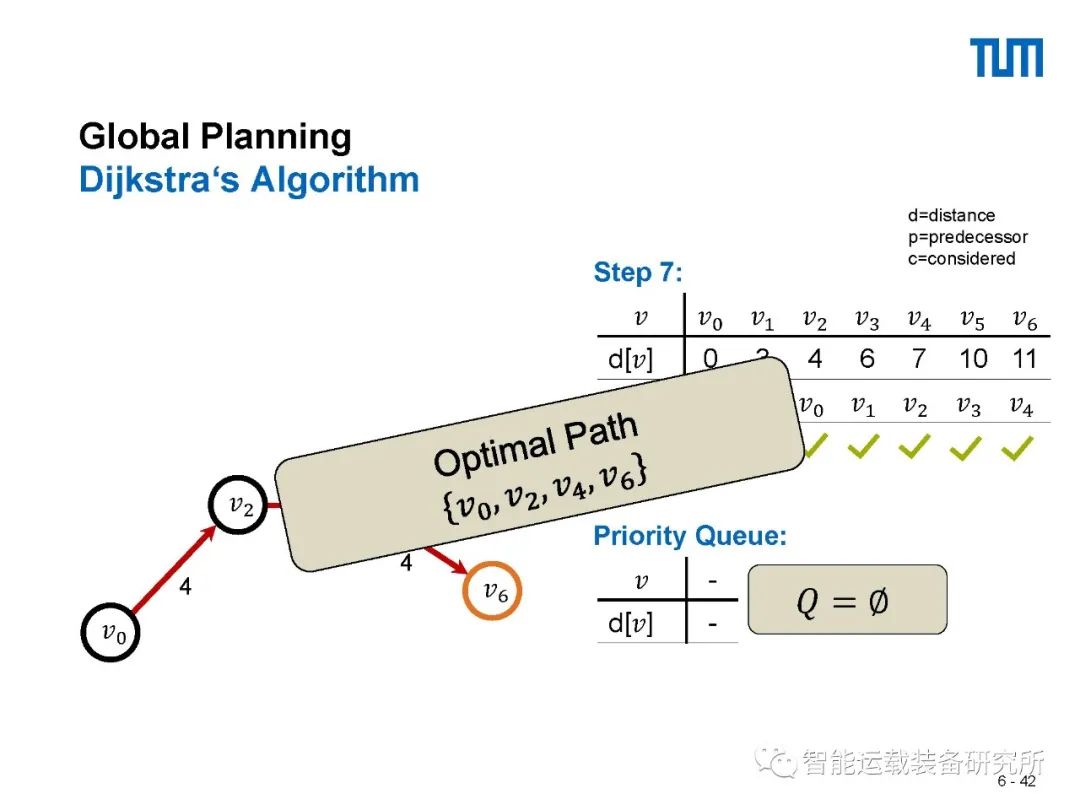
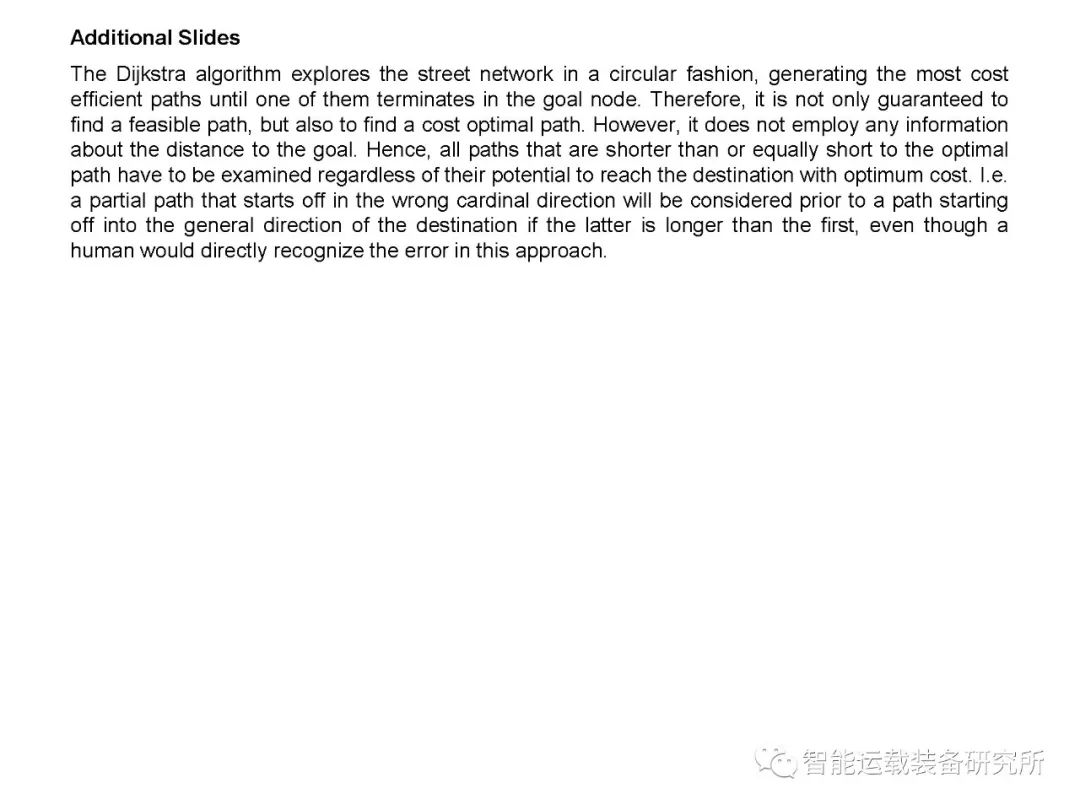
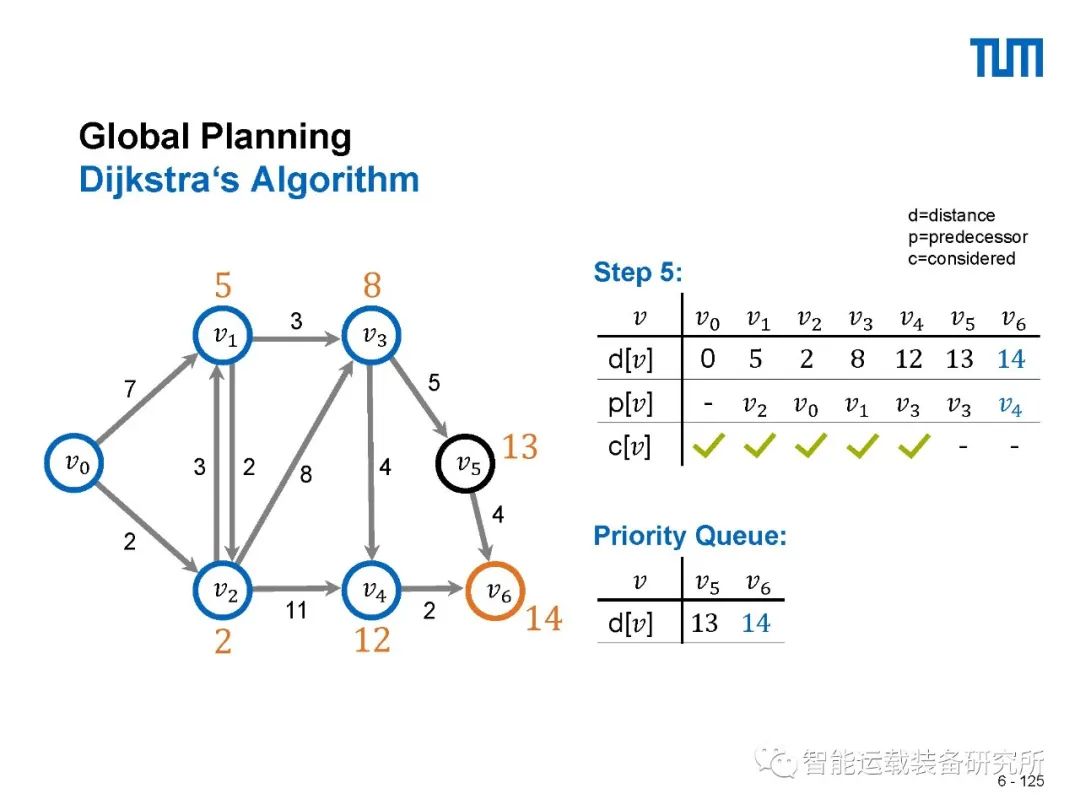
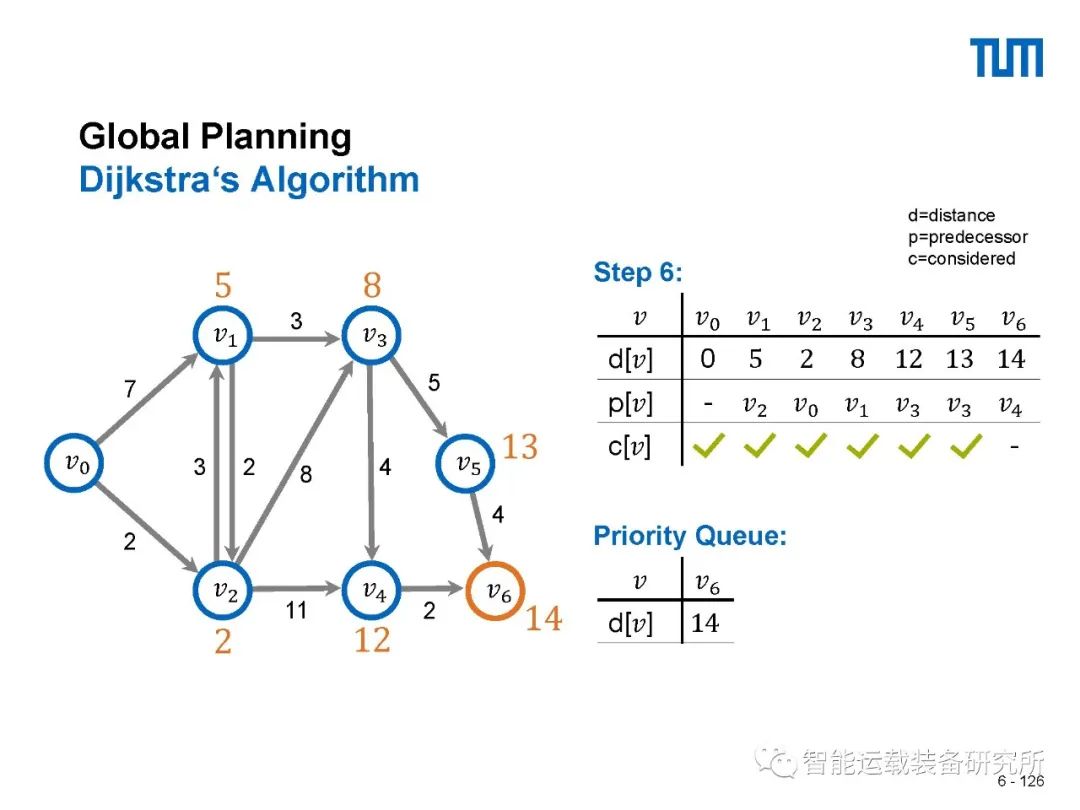
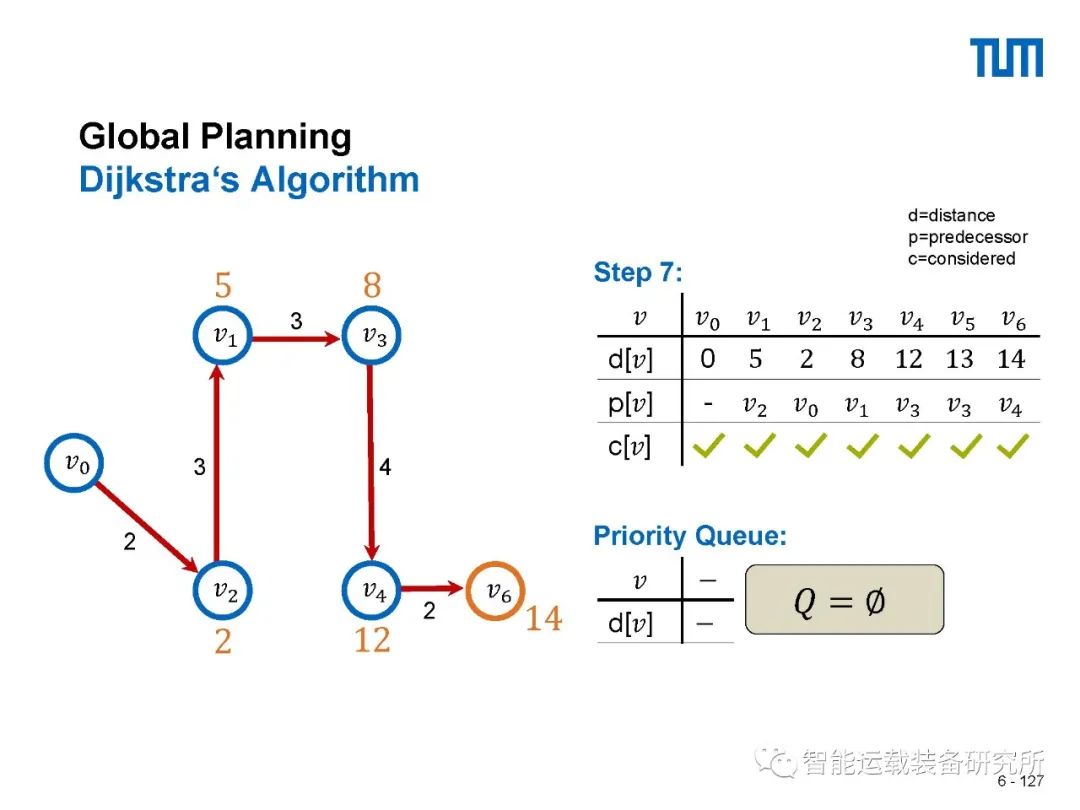
Dijkstra算法是由计算机科学家Edsger W. Dijkstra在1956年提出,用来寻找图形中节点之间的最短路径。在Dijkstra算法中,需要计算每一个节点距离起点的总移动代价。同时,还需要一个优先队列结构。对于所有待遍历的节点,放入优先队列中会按照代价进行排序。在算法运行的过程中,每次都从优先队列中选出代价最小的作为下一个遍历的节点。直到到达终点为止。
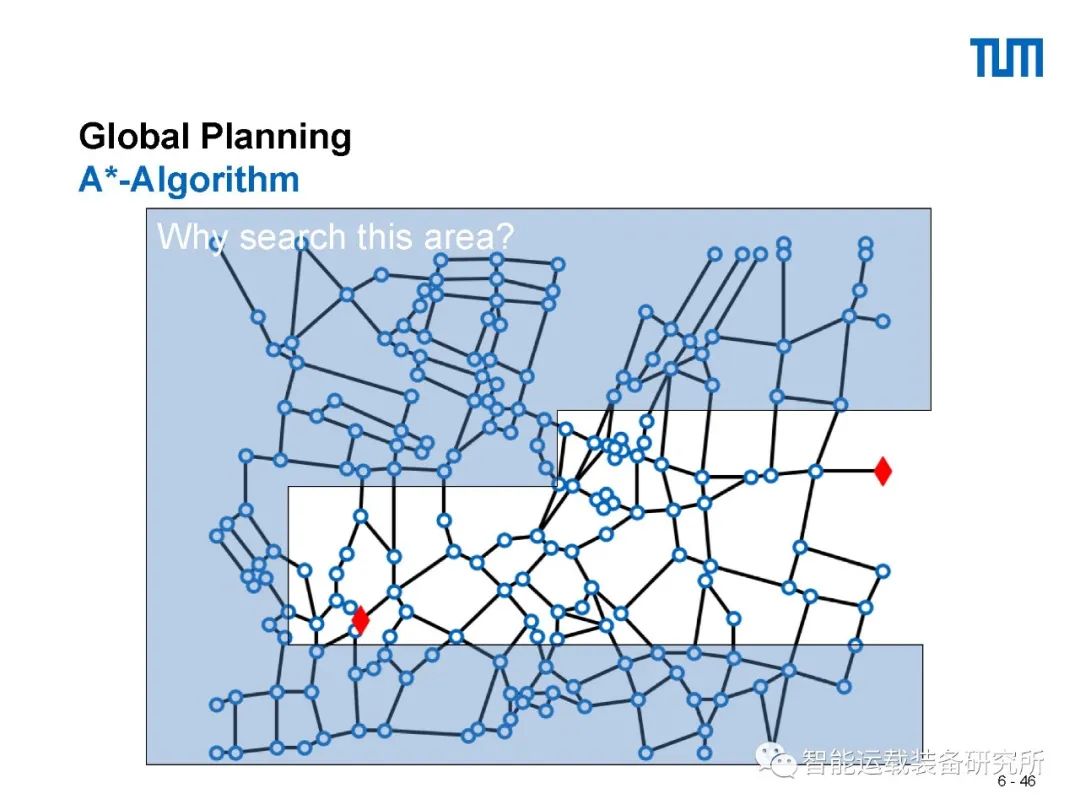
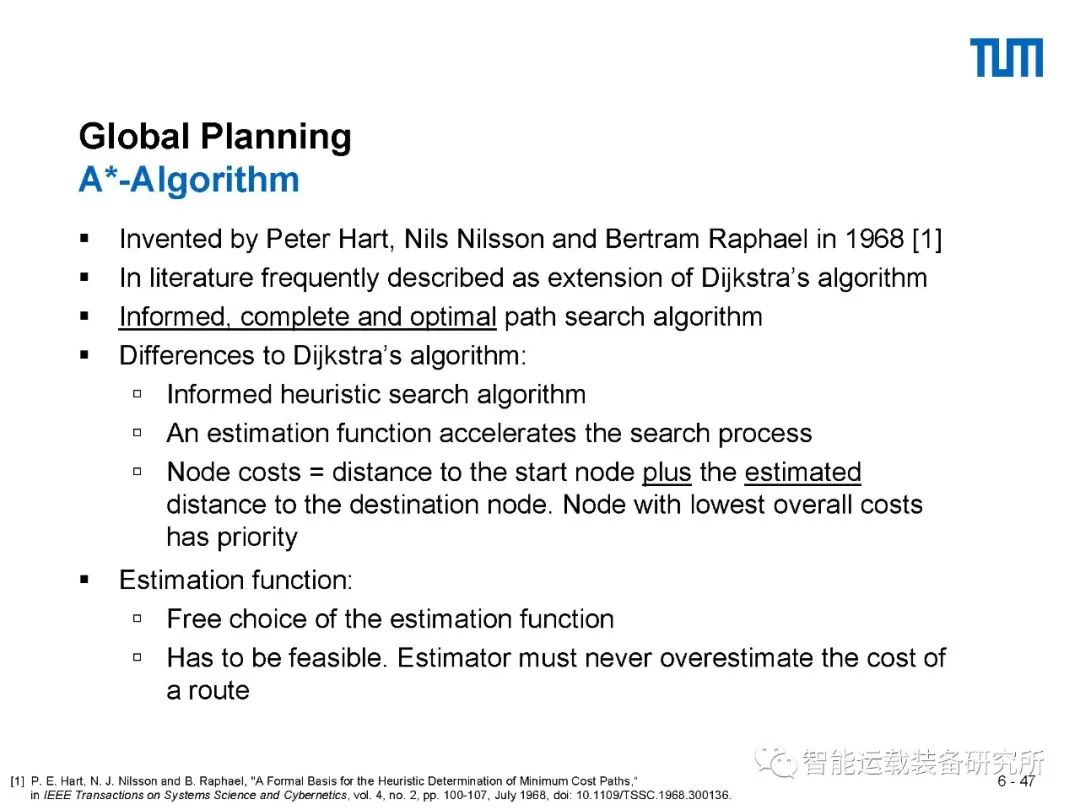
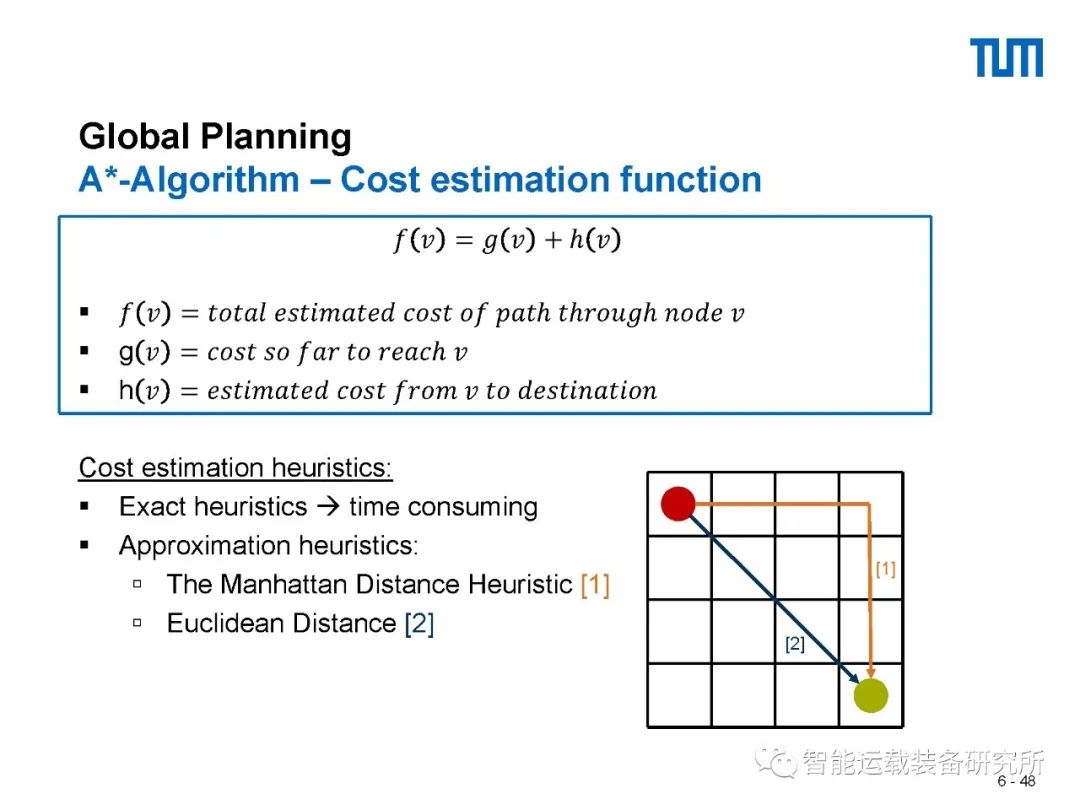
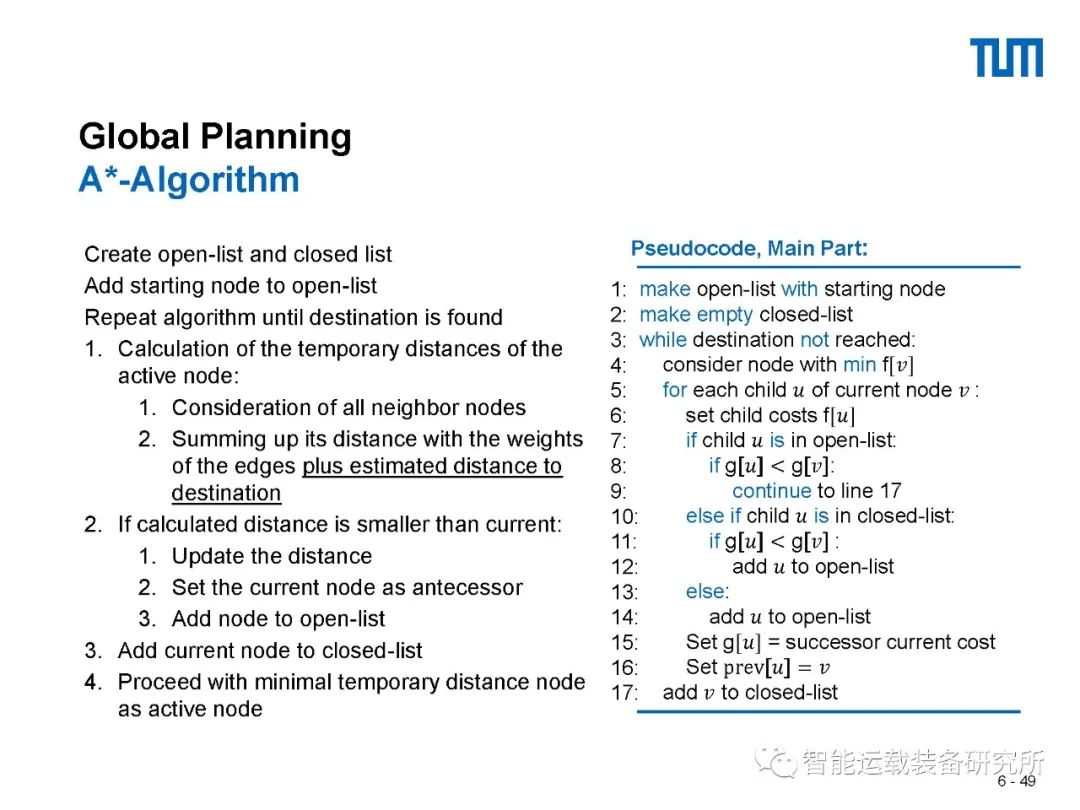
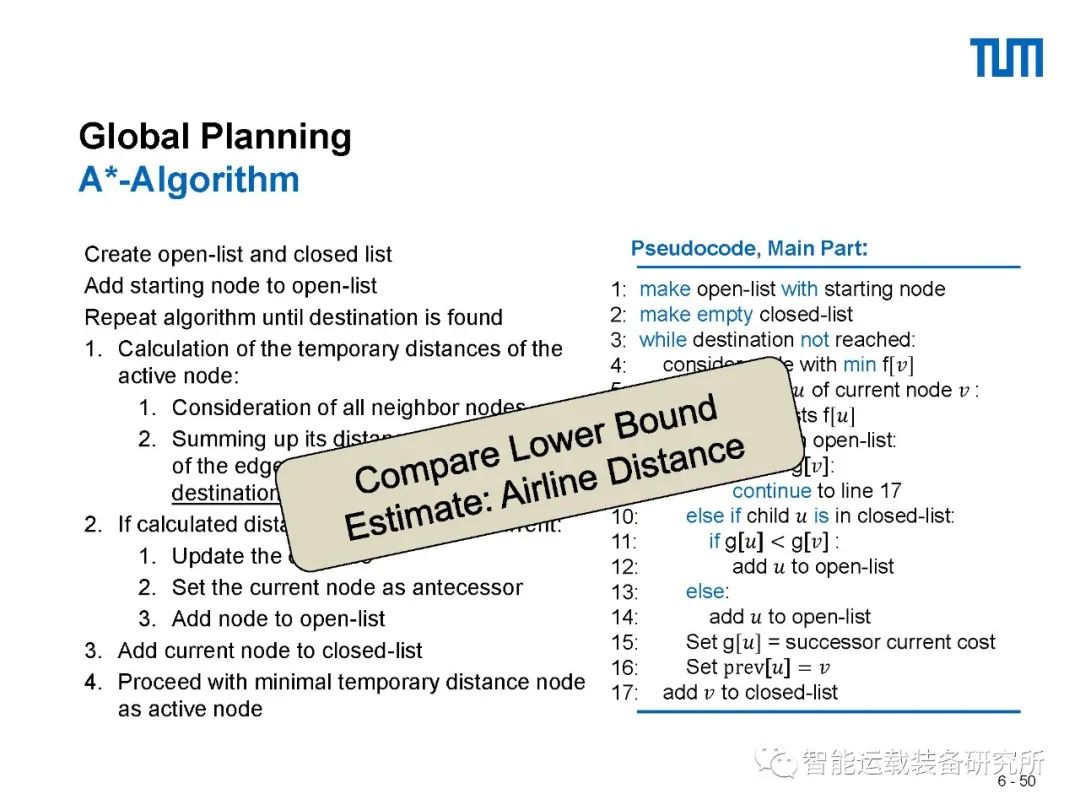
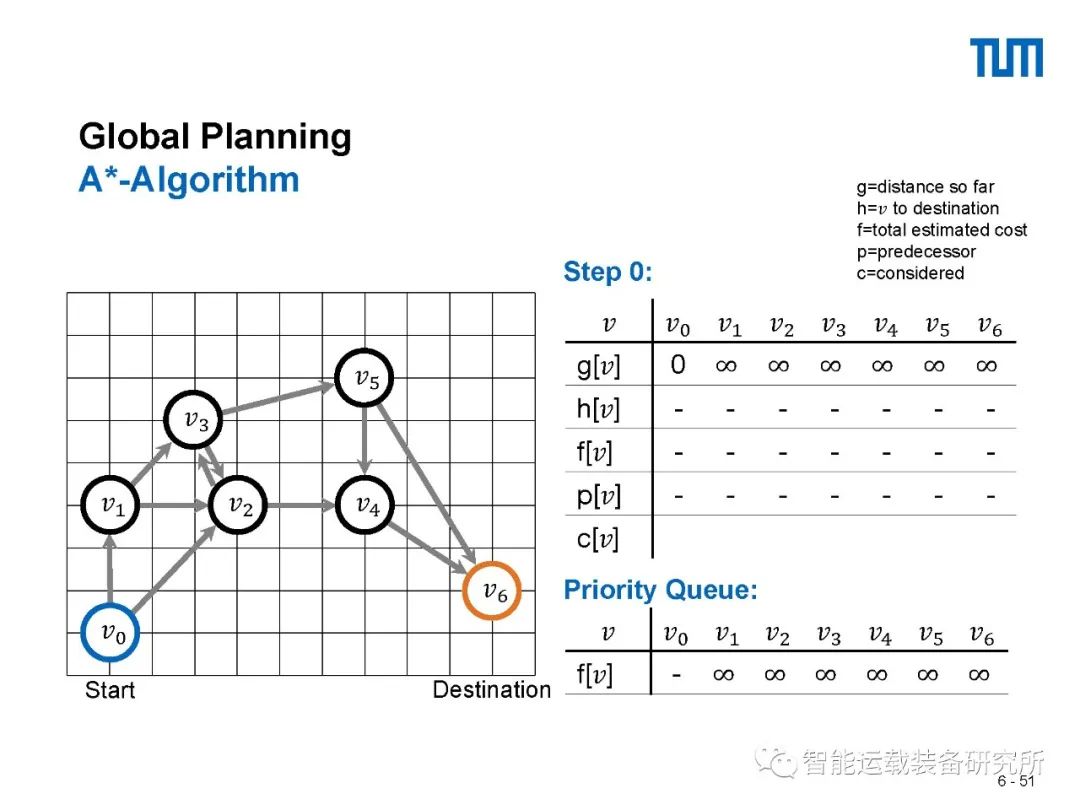
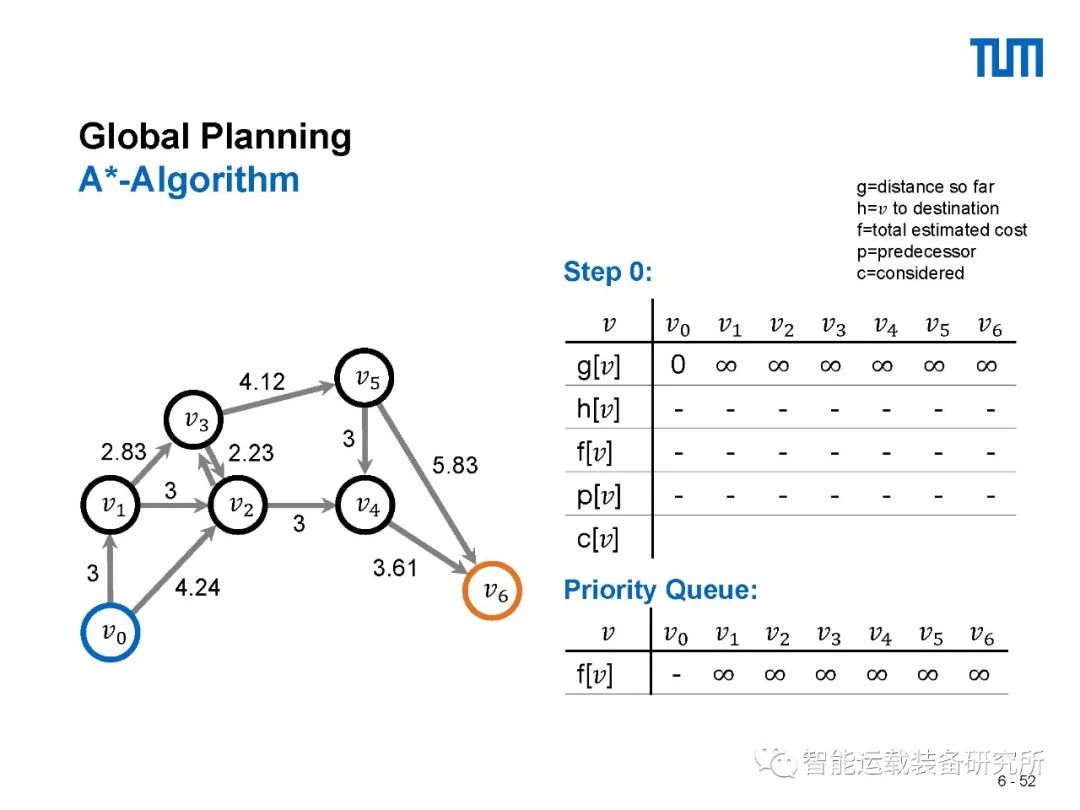
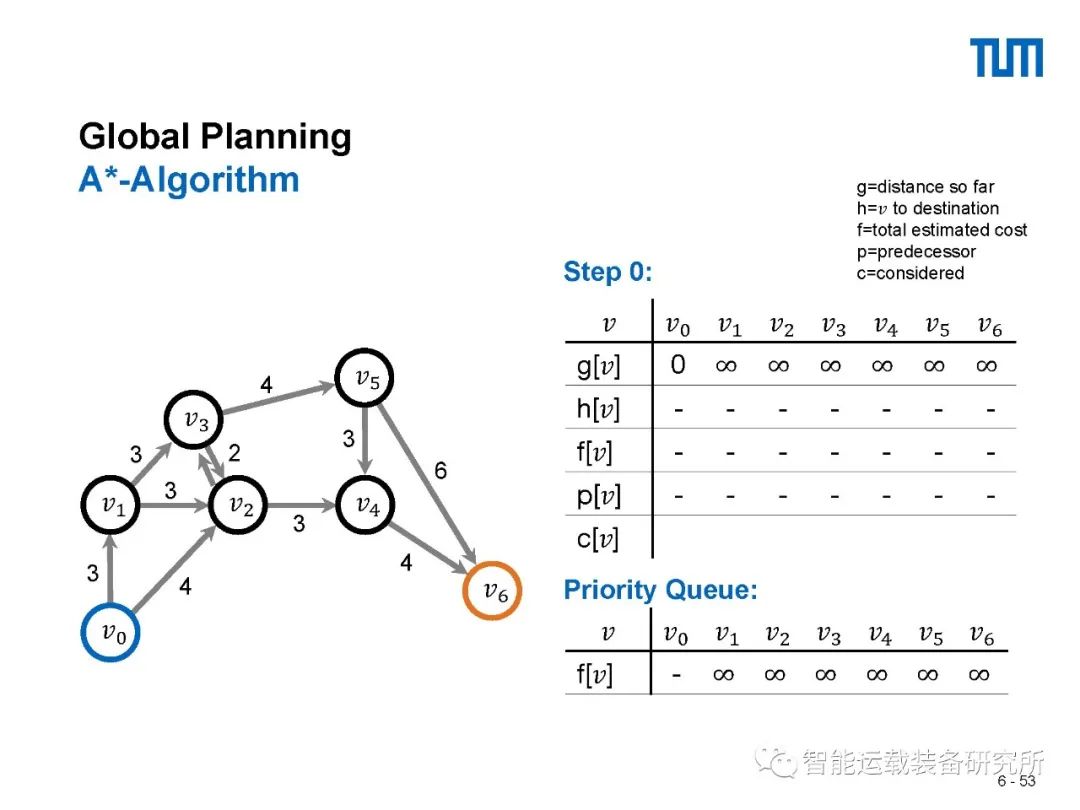
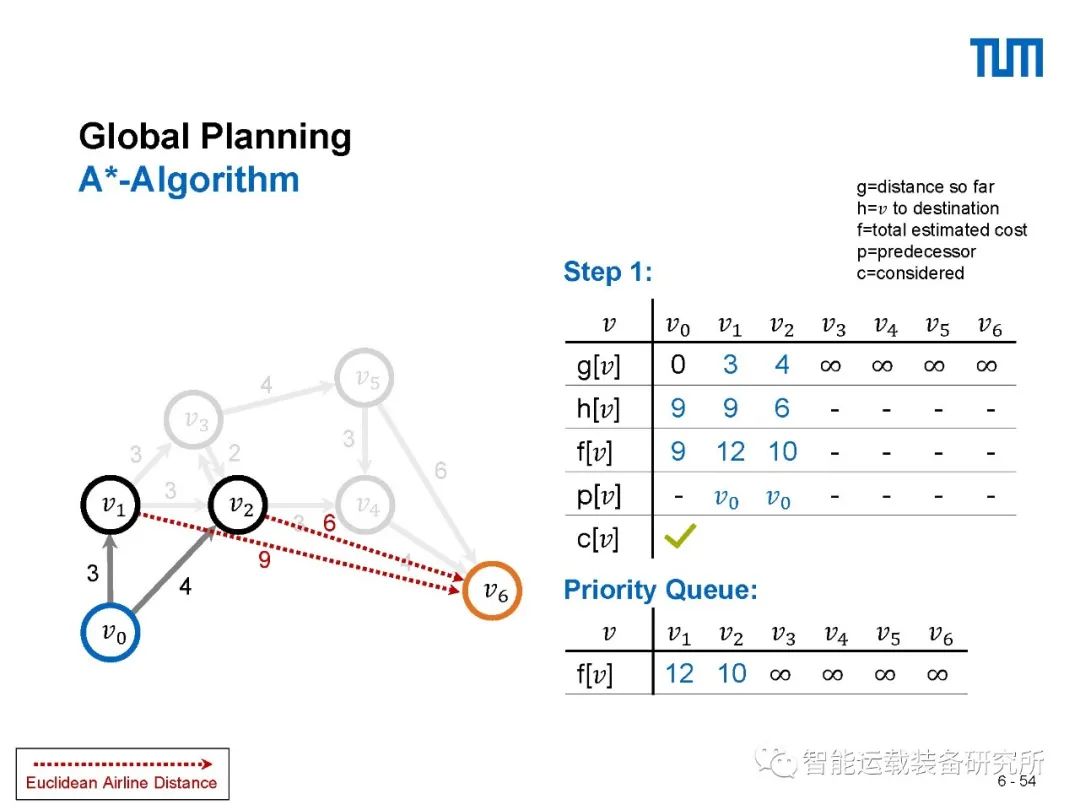
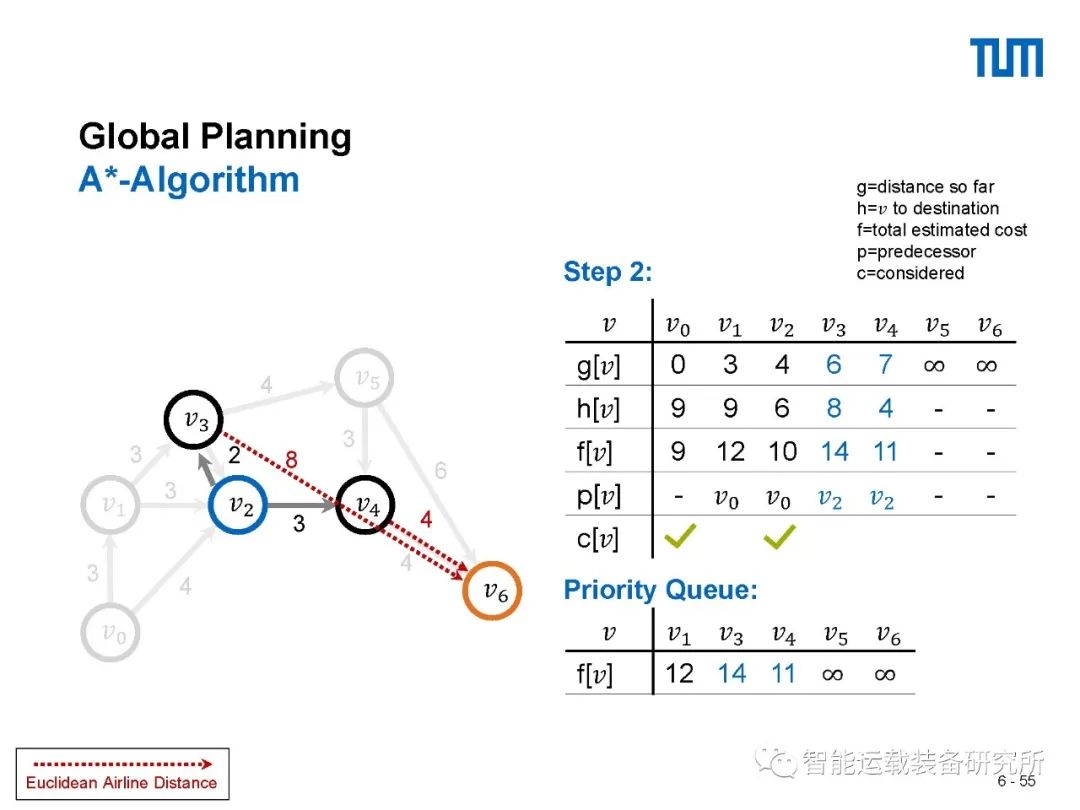
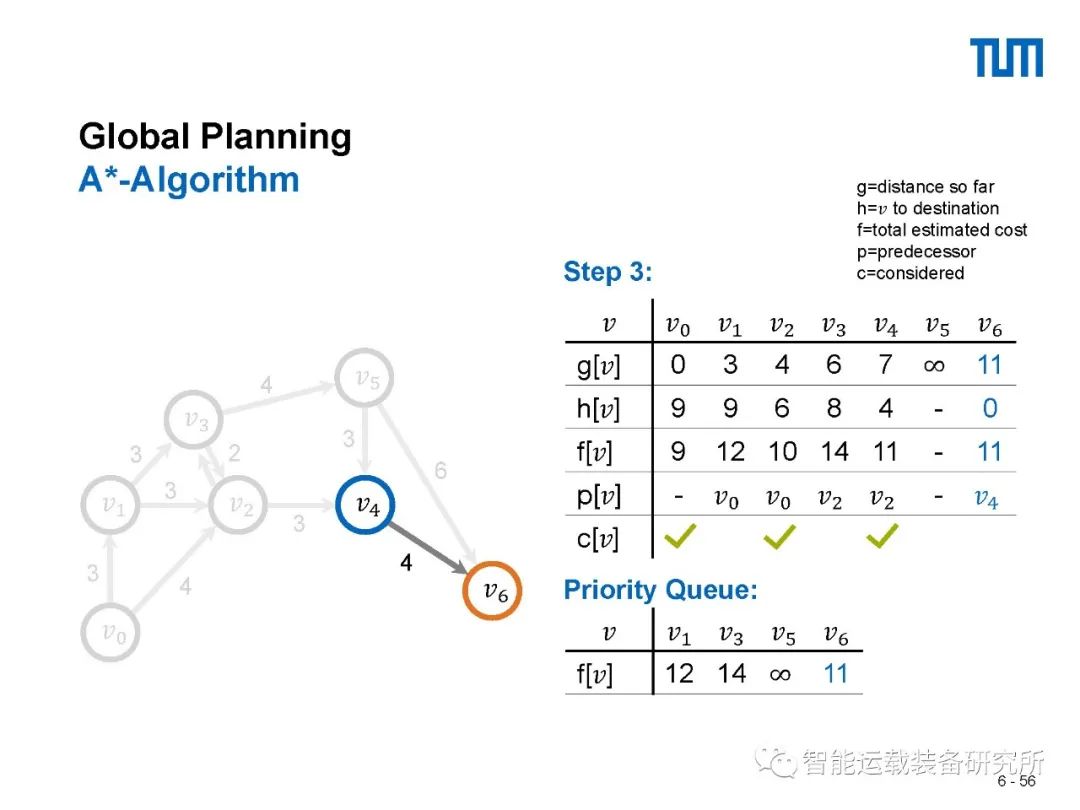
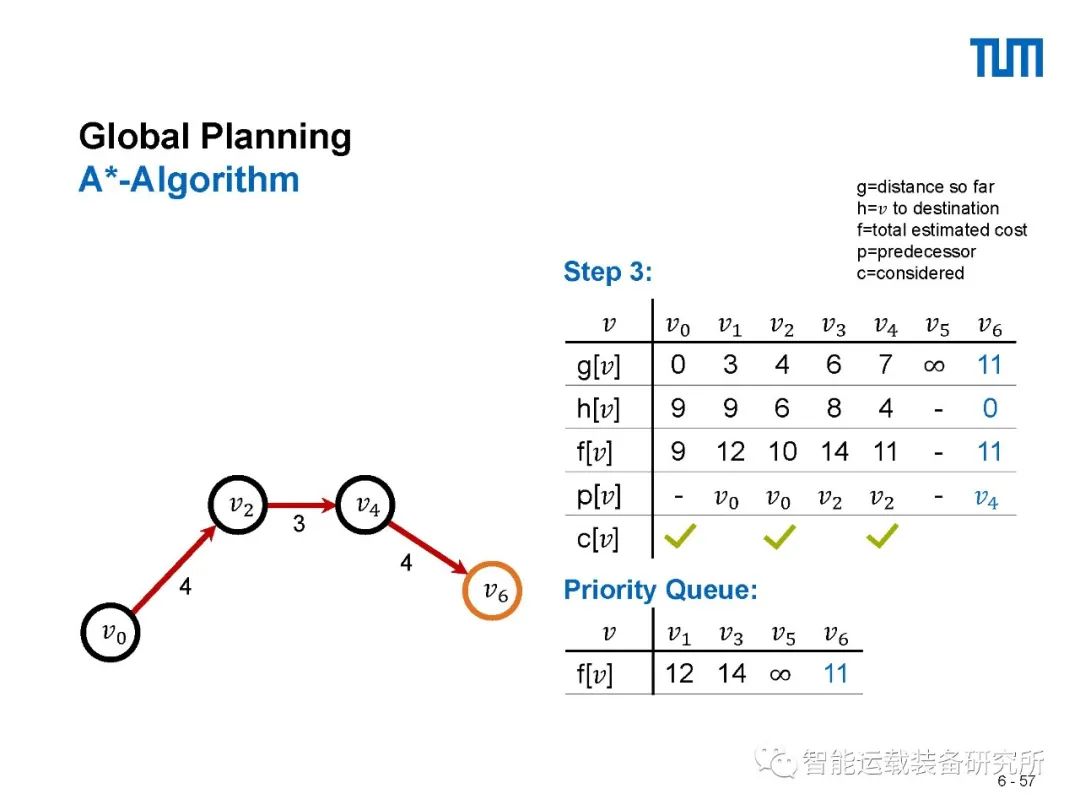
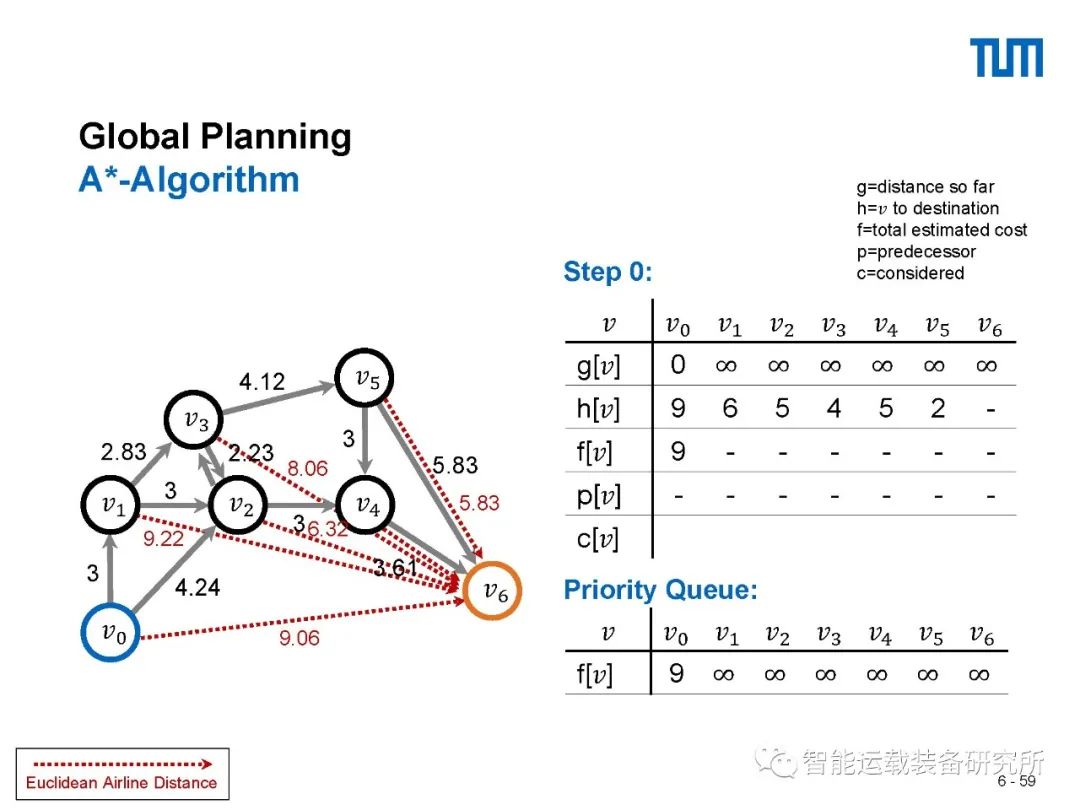
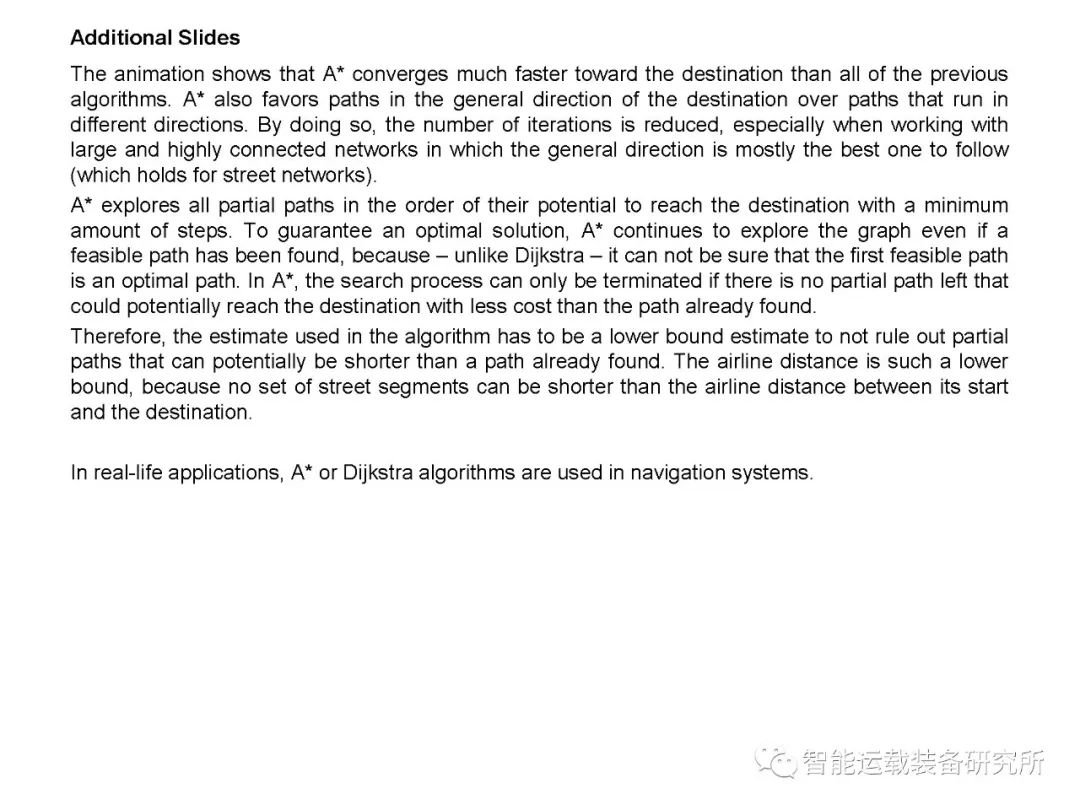
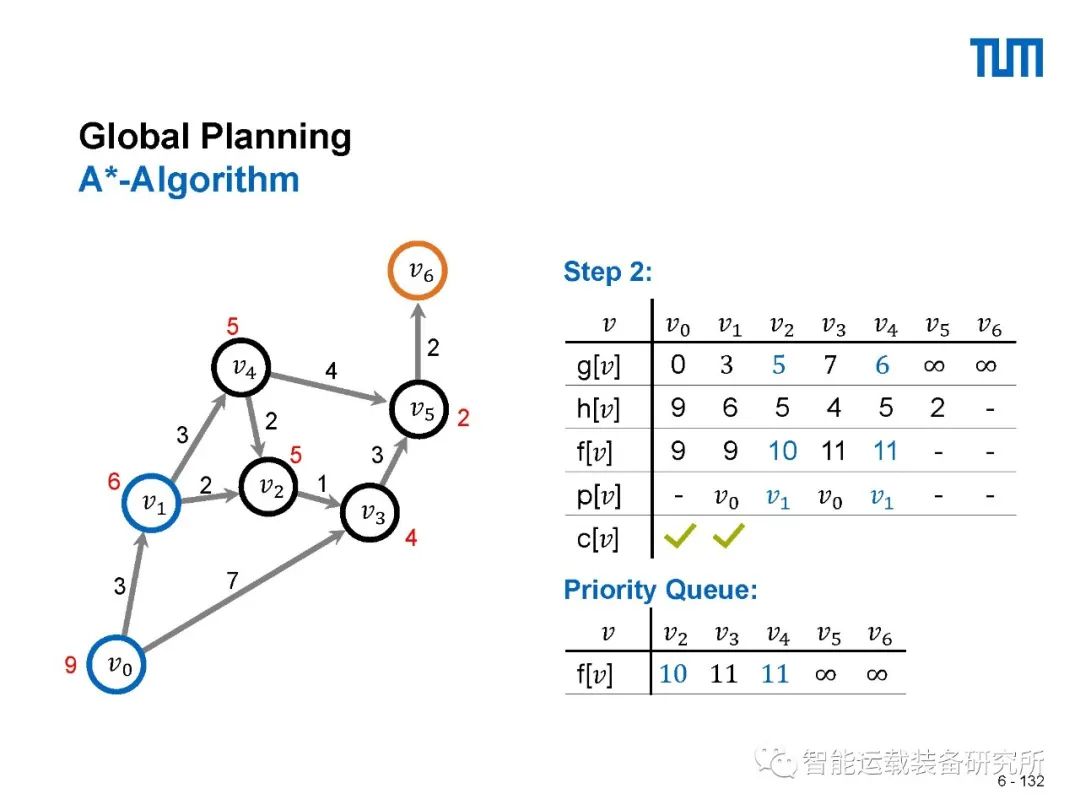
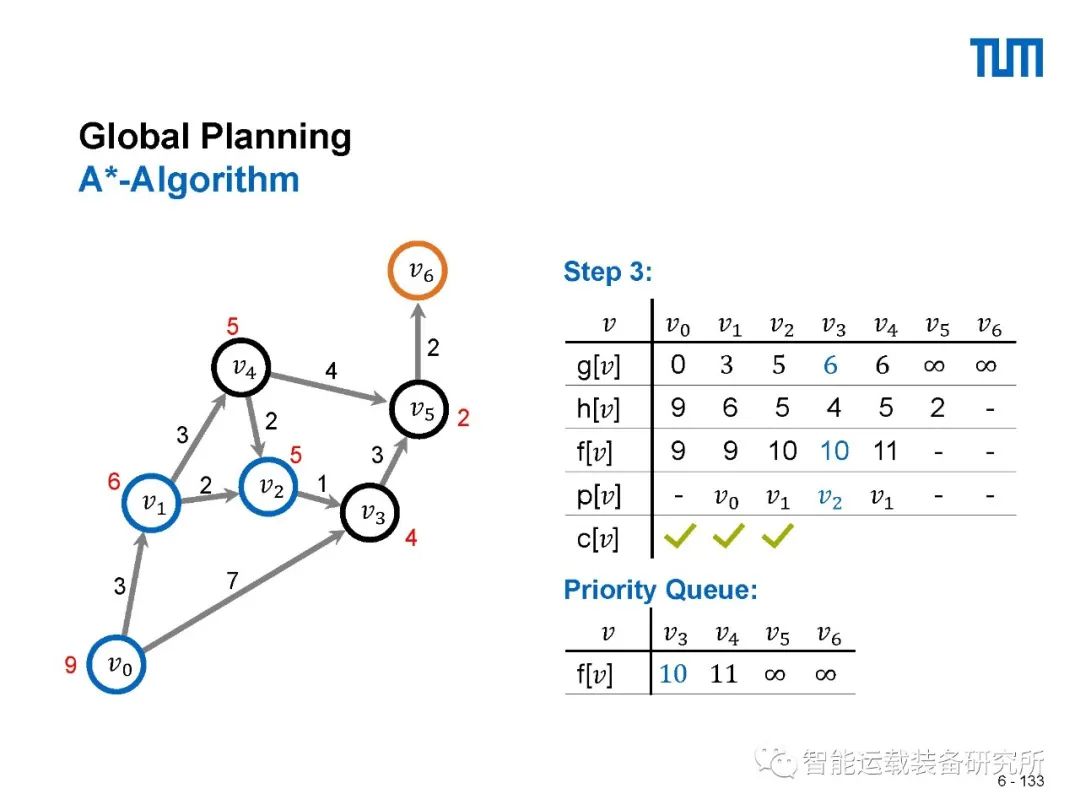
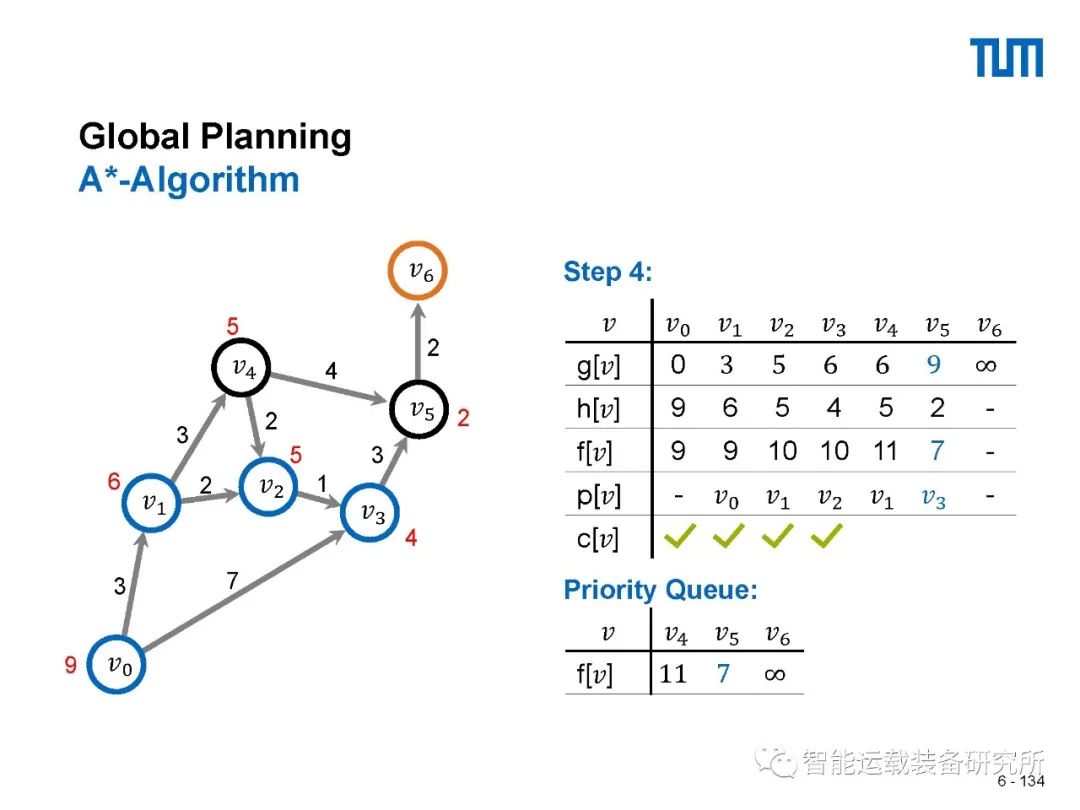
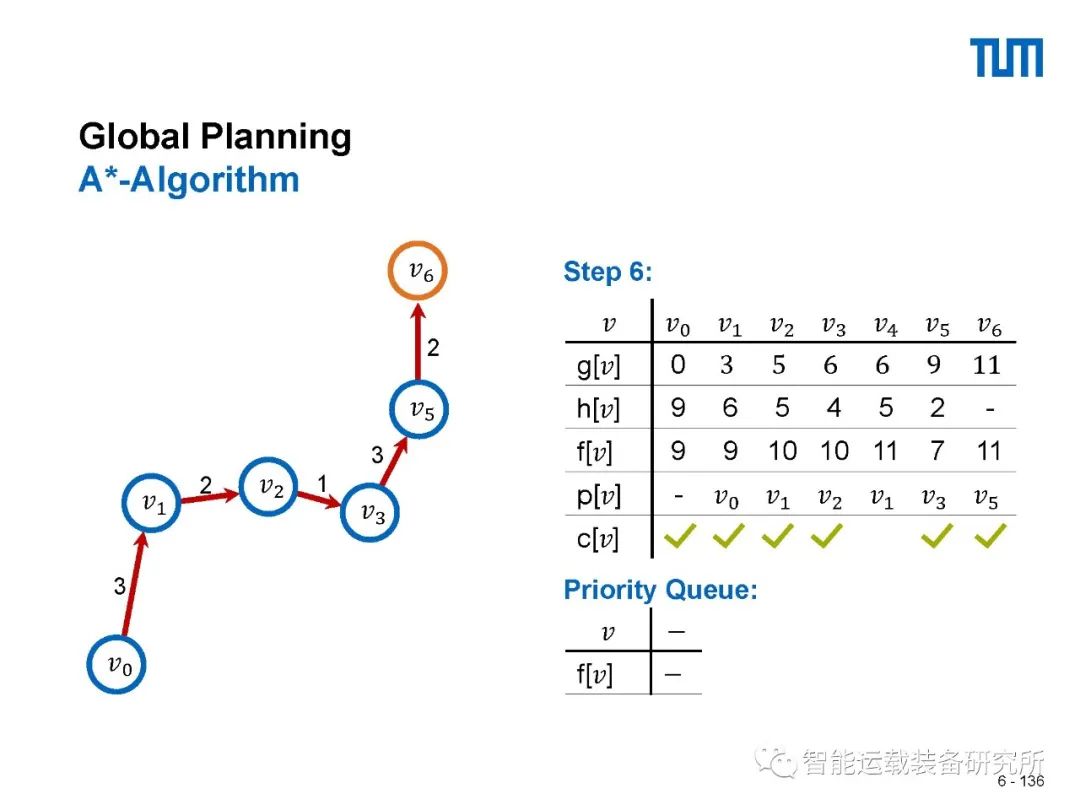
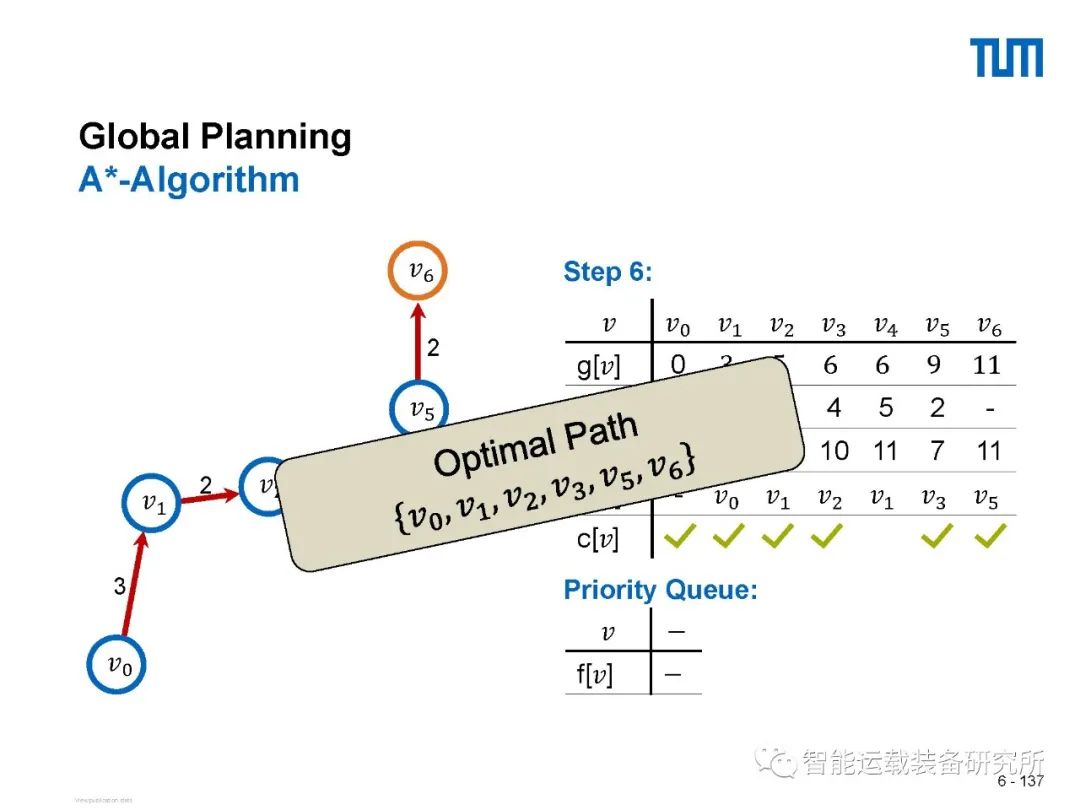
A*算法,A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。

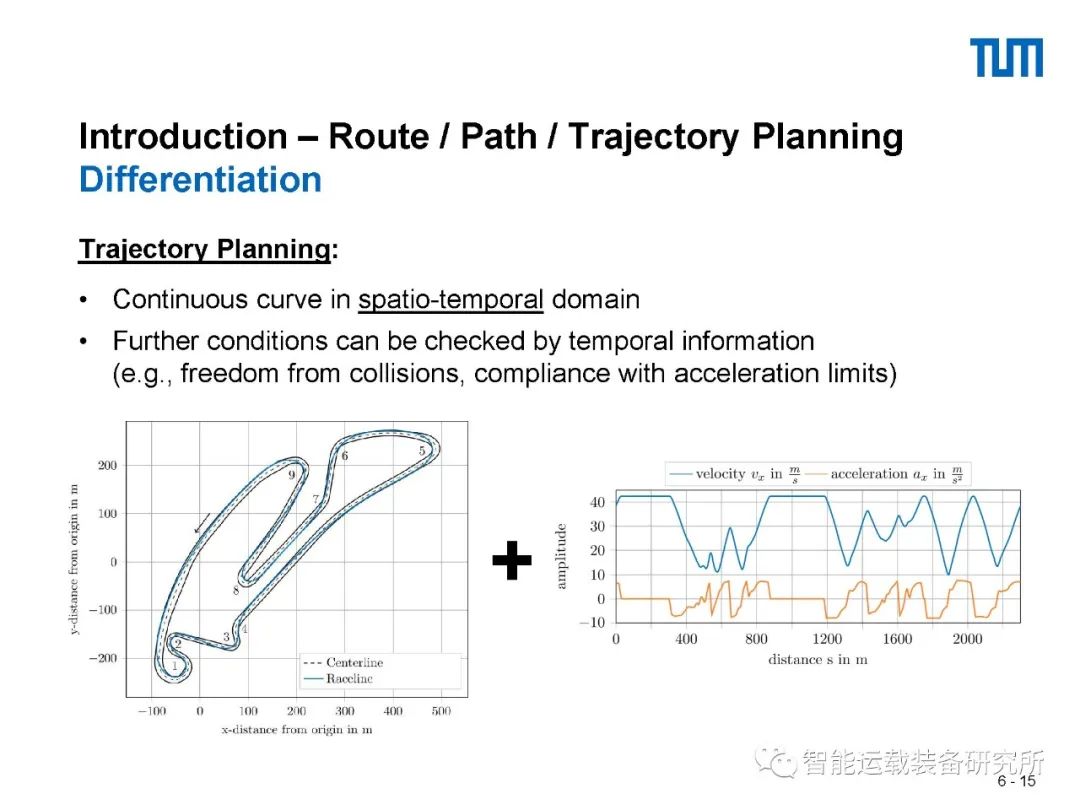
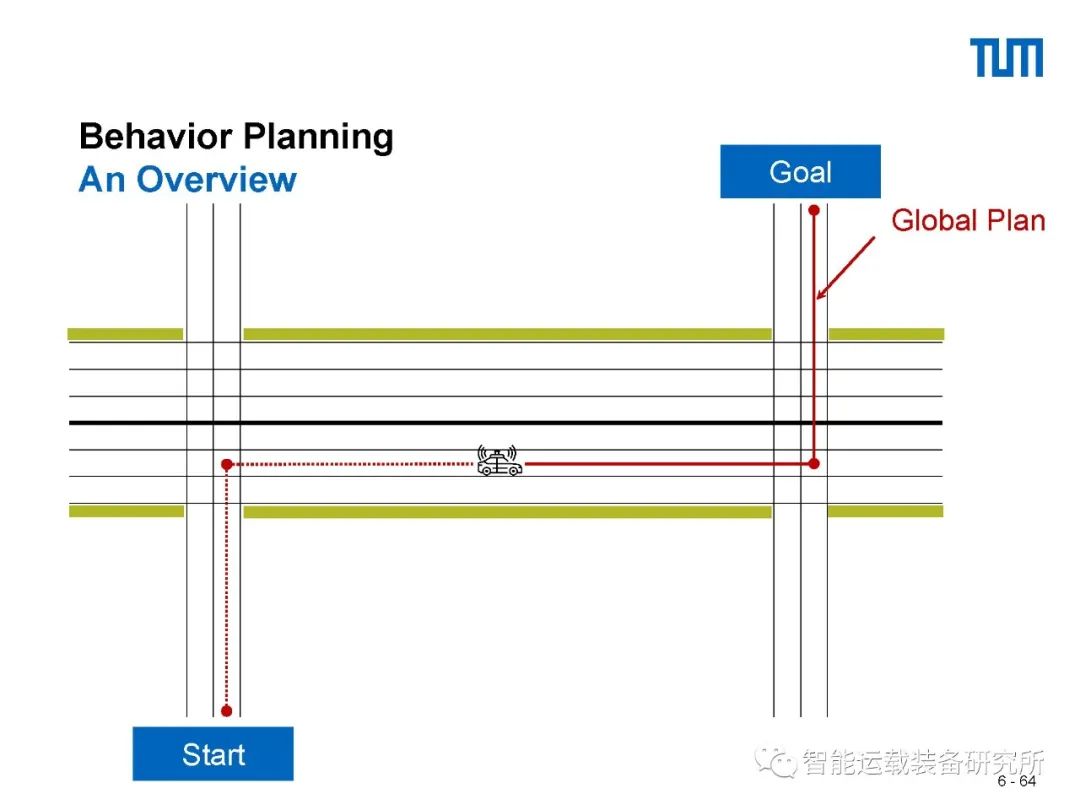
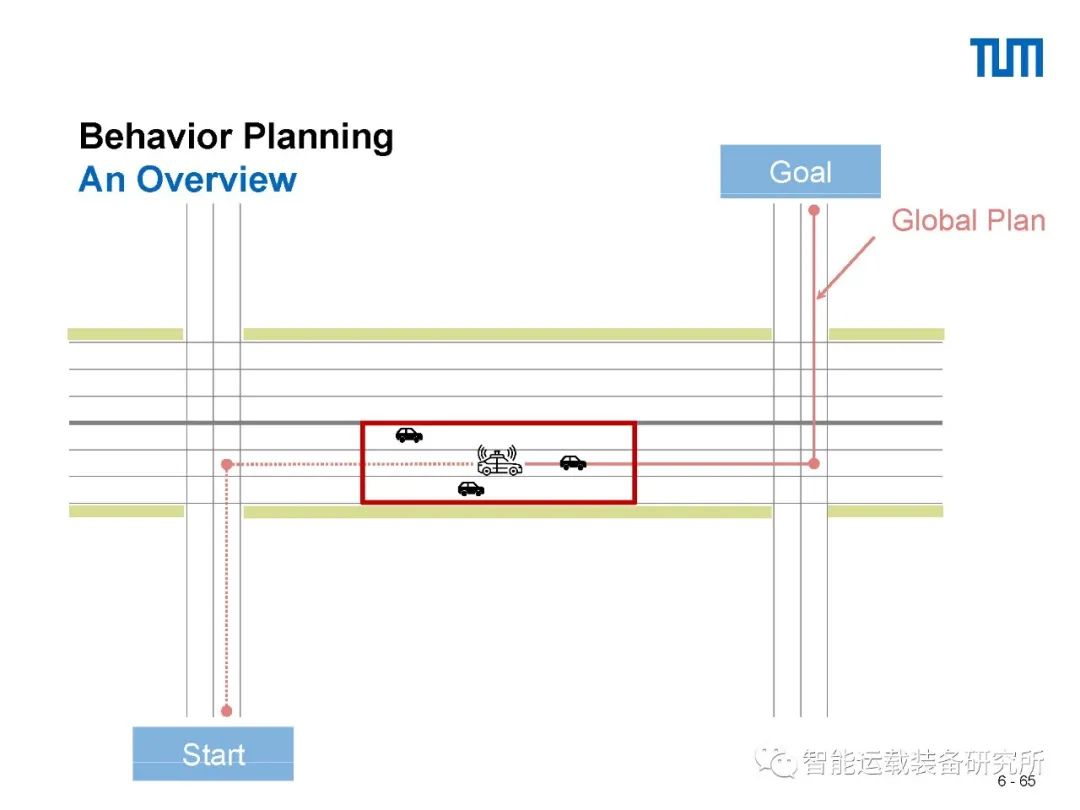
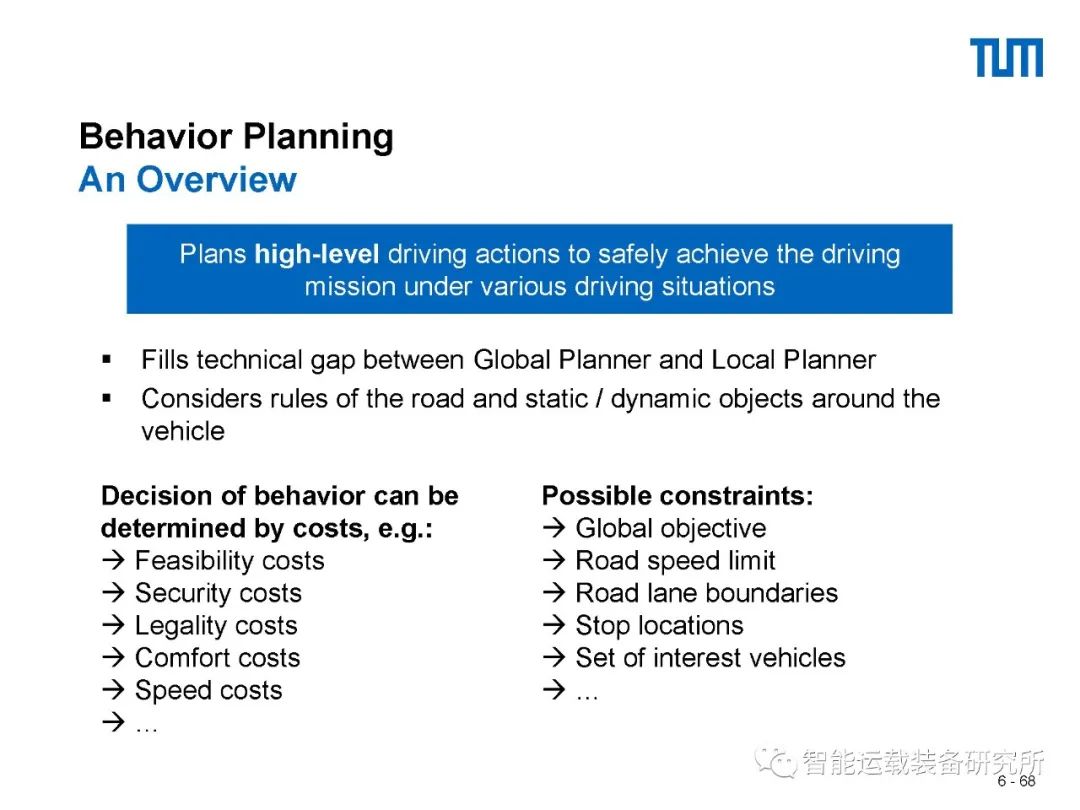
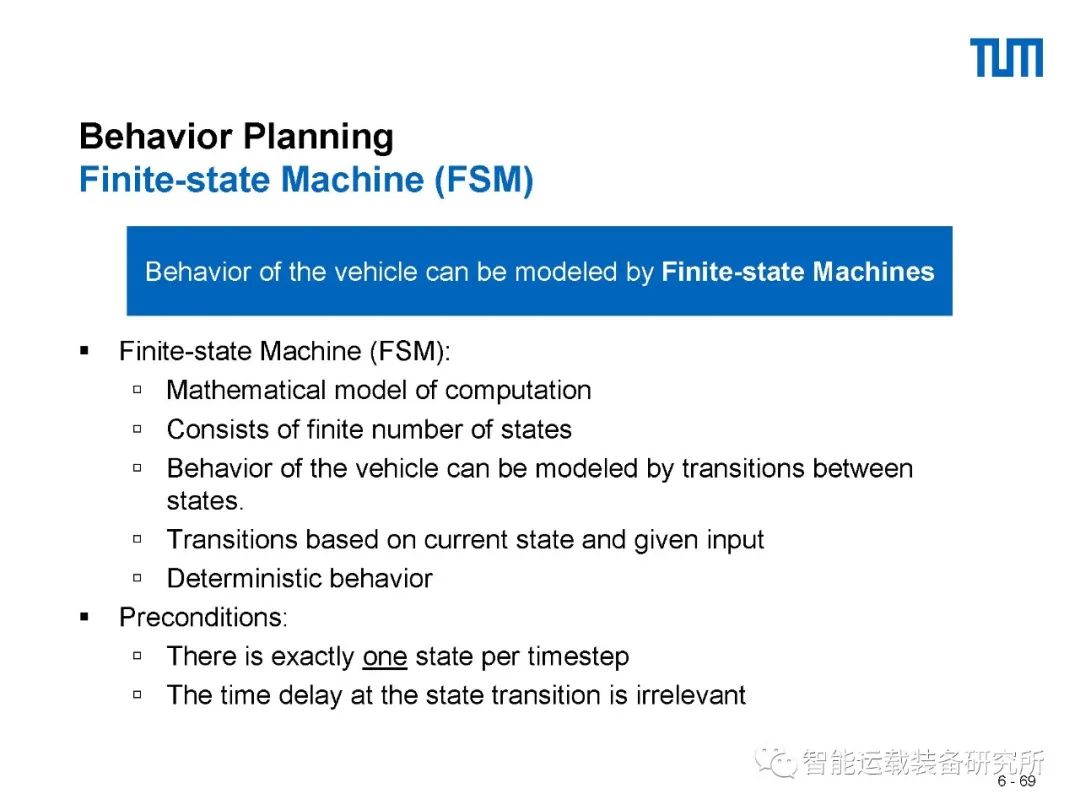
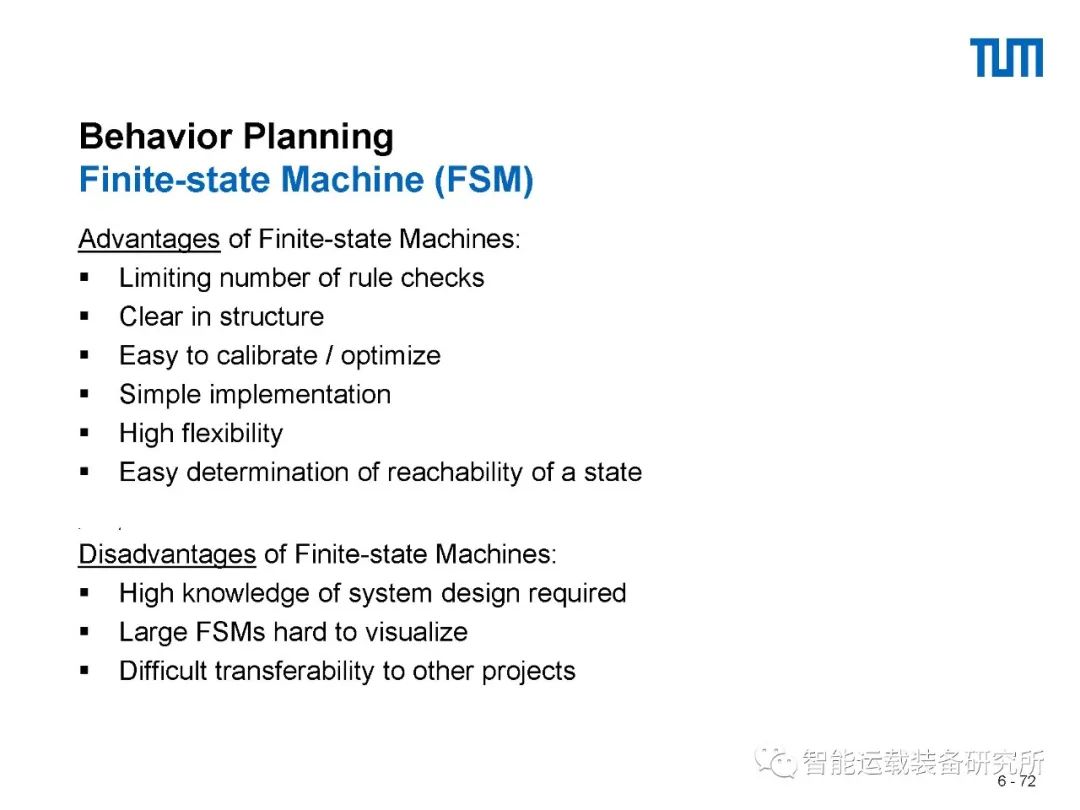
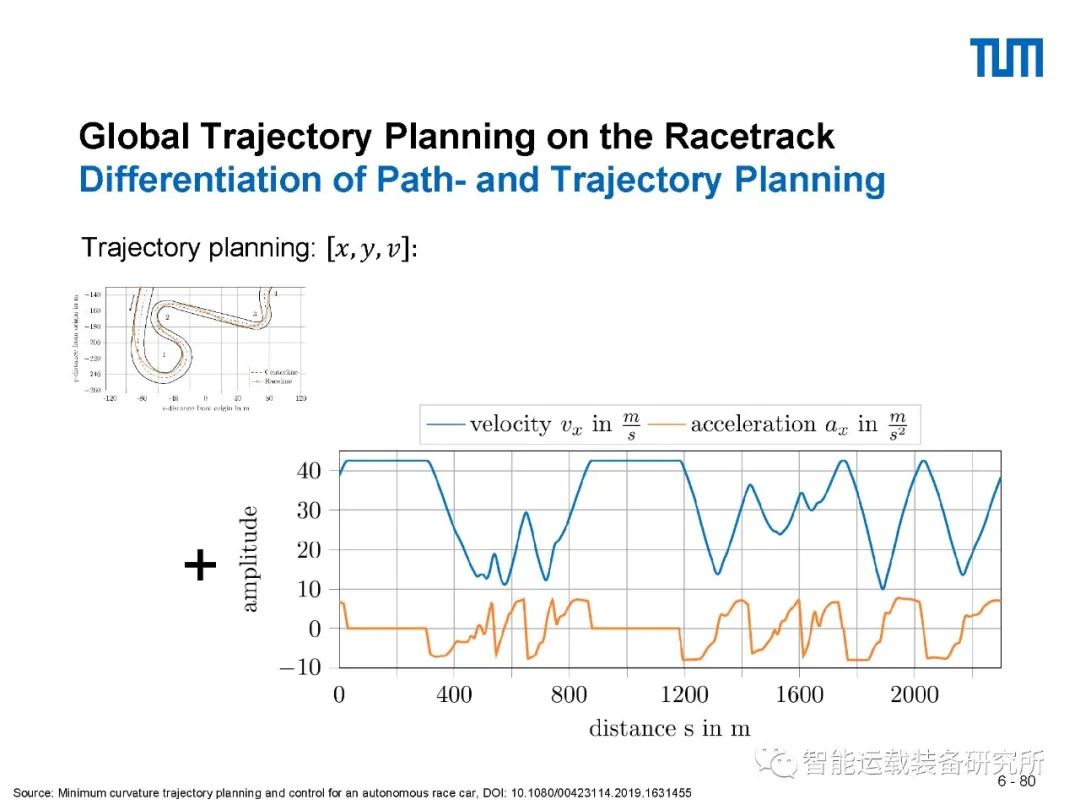
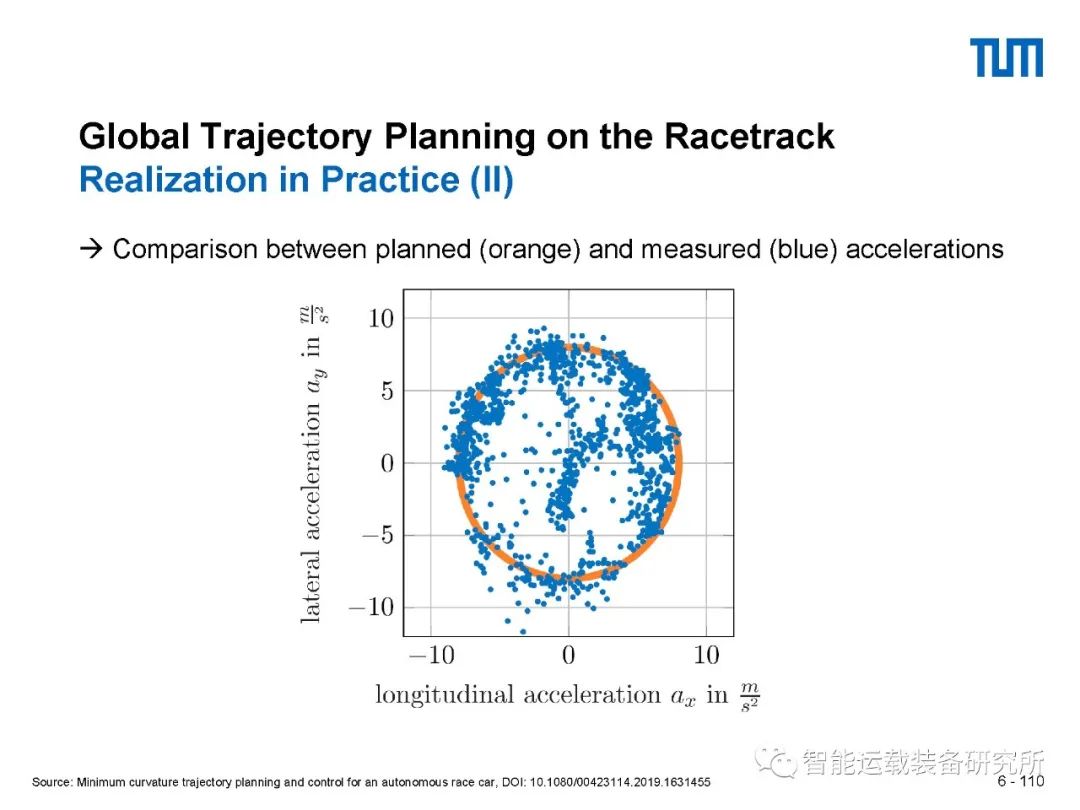
2. 行为规划和轨迹规划



参考文献
A*算法详解一看就懂(python)_在键盘上弹钢琴的菜菜的博客-CSDN博客_a*算法

















 2339
2339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









