







What is Steer什么是转向?
转向是指车辆的坐标系中的车轮的角度方位的一个方面(其它的是外倾角或倾斜和旋转)。 具体地说,转向是从车辆纵轴(在CarSim中为X轴)到由车轮的平面与车辆水平面(在CarSim中为X-Y平面)的交点形成的线的角度。在CarSim中,除了使用Legacy Twist Beam(Legacy Twist Beam不包括转向自由度)的悬架外,任何轴上的所有车轮都可以转向。 CarSim不支持拖车轴的转向,但用户可以使用VS命令来实现。.
转向来自多个来源。 首先,最明显的是车辆和车轴转向系统(如果存在)的输出。转向系统将施加到车辆方向盘(或其他输入)的转向命令转换为车轮的转向。在内部,转向系统可以具有或可以不具有动态元素(微分方程及其积分),并且可以取决于或不取决于施加的力。 这部分转向可以称为主动转向。
车轮转向的第二个来源是悬架系统的运动学特性。无论是否存在转向命令,都会发生此转向。通常将其称为“转向平顺性”,“转向前束”,“侧倾转向量”或“侧倾转向角”。 在这里,转向角按照传统习惯是指在轴上的两个车轮上以相反的符号进行转向运动。 当两个车轮都转向车辆中心线时,这种作用称为转向角向内或正转向角。当两个车轮都转向远离车辆中心线时,这种影响称为转向角向外或负转向角。(请注意,两侧的转向幅度不必相等,即效果可能是不对称的。)
车轮转向的第三个来源是运动,这是由于部件(主要是轮胎力)施加弹性变形而产生的运动(主要是弹性衬套,但也包括结构变形)。被称为转向运动特性或运动学转向角,通常通过描述施加力分量的单位变化的车轮转向变化率的系数来表征.
上面列出的第二和第三种转向源可以称为被动转向,因为它们在没有命令的转向变化的情况下发生。
CarSim转向系统可转向,以响应命令输入,包括运动学特性和弹性学特性(如果有)。 换句话说,它是主动转向。 悬架系统提供了被动式转向(尽管在界面上具有顺应性之一,并且具有转向系统的其他特性)。
在“转向系统”界面上的数据字段中输入参数以描述系统的许多属性,而可配置函数则用于描述许多其他属性。 每个可配置函数都由一个单独的库界面表示,如表1所示。(有关可配置函数及其各种选项的说明,请参见VehicleSim浏览器参考手册。)
转向系统概念The CarSim Steering System in Concept
转向系统提供了许多选项,以代表当今乘用车和轻型卡车提供的大多数配置。用户还可以使用VS Commands或Simulink之类的外部代码用自己的定义替换系统元素。
这些选项将在此处概述,并在本文的后面部分进行更详细的讨论。
第一个最基本的选择是选择是否可以主动转向轴上的车轮。CarSim浏览器将参数OPT_STEER_EXT的值设置为零(主动转向)或一个参数值(非主动转向)以设置此选项,但高级应用程序用外部定义的子系统替换了转向系统的元素。
其次,任何主动转向的车轴都可以使用齿轮齿条或循环球式转向器。值得注意的几点:尽管浏览器和手册中使用了“循环球”一词,但实际的齿轮可能具有以下几种配置中的任何一种,例如蜗杆和滚轮或蜗杆和扇形。唯一的重要特征是齿轮的输入和输出都是旋转,而齿轮齿条则以旋转为输入,而平移为输出。同样,CarSim也不区分齿轮是安装在轴的前面还是后面。齿条和小齿轮的正输入会产生正向平移,正向平移会产生正向转向。同样,循环球齿轮的正输入会在输出处产生正旋转,进而产生正转向。选择该约定是出于涉及闭环转向控制器支持的技术原因。在顺应性转向的计算中记录了归因于车轴前进档与车轴后方的影响。
第三,第一轴可以被指定为助力转向或手动转向。所有其他轴都在伺服控制下处理,只有第一个轴有助于方向盘上的扭矩。由于在控制输入(转向柱旋转)和齿轮输入之间插入了扭力弹簧(扭力杆),因此带有助力系统的车桥获得了更大的自由度。弹簧中的扭矩输入到助力表(或扭矩)以获得助力水平。
提供了几个次要选项。方向盘扭矩可以从扭矩表中读取,这些扭矩是转向轴(主销)扭矩的总和,或者可以根据系统运动学,增压(如果有),阻尼和磁滞来计算。可以链接表格以指定要添加的转向扭矩的附加分量作为速度的函数,以反映例如驻车操纵中表现出的较高扭矩。并且,“转向”的定义可以在如上所述的车辆坐标系中或围绕转向轴的旋转来引用。第二种选择很少使用,但是例如在通过测量围绕转向轴的角度的仪器获得的实验数据的情况下。
车轮的转向取决于转向系统和悬架的特性。转向系统模型包含相当多的细节,包括转向轮的完整多体动力学表示以及动力转向系统。它还区分了齿条和小齿轮转向和循环球转向系统。
转向系统包括运动和顺应性效果。运动效应是转向运动,仅取决于部件的位置(例如,方向盘或齿条位置)。顺应性效应是由转向系统或车轮内的力或力矩引起的转向运动。除由悬架运动引起的转向效果外,还将两者结合起来以确定每个车轮的转向角。
悬架界面中包含描述悬架运动和转向角之间相互作用的参数,这些参数在为每个仿真生成的Echo文件的“转向”部分中列出(图1)。
可配置函数用于描述转向系统和组件的许多属性。请注意,在Echo文件的“转向”部分开头的注释中也提供了函数名称(图1,第314 – 316行)。每个表都由一个单独的库界面表示,如表1所示。一个例外是,扭杆刚度在数学模型中使用可配置函数M_TBAR表示,但GUI支持线性系数,该系数由关键字M_TBAR_COEFFICIENT标识。高级用户可以链接到通用表数据集,以将扭矩指定为扭曲的非线性函数。
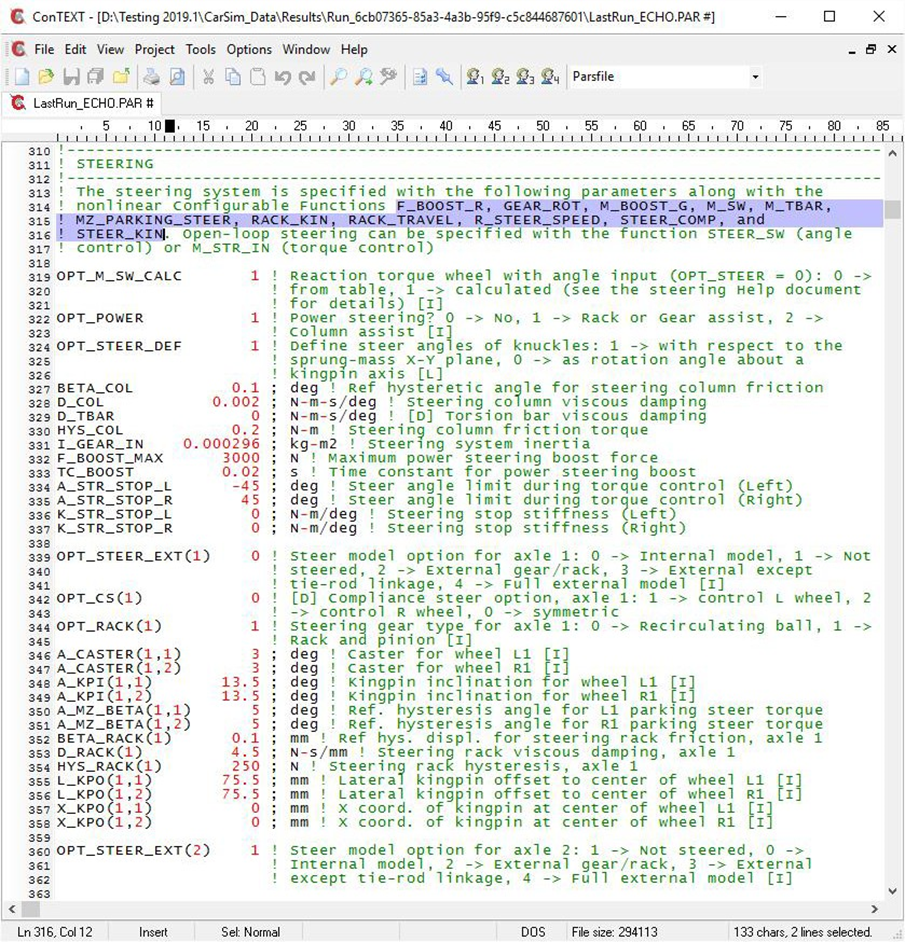
图1. Echo文件的Steering部分,其中列出了参数和名称可配置函数.
详细转向系统模型 The Steering System Models in Detail
CarSim提供四种转向系统。每个转向助力辅助系统提供两个选项(辅助应用于齿轮的输出侧或应用于圆柱或输入侧),总共有六个选项。 转向系统的选择是使用图2所示的下拉控件进行的。下面将分别对它们进行描述。
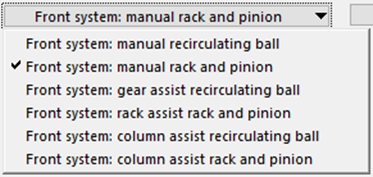
图2.转向系统选择.
表1.转向表库总结.
| 库界面 |
跟关键字 |
描述 |
| Steering: Parking Torque |
MZ_PARKING_STEER |
低速和停车扭矩 |
| Steering: Parking Torque for 2 Wheels |
||
| Steering System: Compliance |
STEER_COMP |
转向角归因于主销力矩 |
| Steering System: Gear Kinematics |
GEAR_ROT ISHAFT_KIN |
转向器输出旋转与输入旋转,中间轴输出旋转与输入旋转 |
| Steering System: Rack Kinematics |
RACK_TRAVEL ISHAFT_KIN |
转向齿条位移与小齿轮旋转,中间轴输出 |
| Steering: Power Assist Force |
F_BOOST_R |
旋转与输入旋转 |
| Steering: Power Assist Torque |
M_BOOST_G |
助力施加于转向齿条 |
| Steering System: Kinematics for One Wheel |
STEER_KIN |
助力扭矩施加到转向器(回流球) |
| Steering System: Kinematics for 2 Wheels (Recirc. Ball) |
||
| Steering System: Kinematics for 2 Wheels (Rack & Pinion) |
RACK_KIN |
车轮转向vs转向臂旋转 |
| Steering System: Rear-Wheel Gain |
R_STEER_SPEED |
|
| Steering Wheel Torque |
M_SW |
车轮转向vs齿条 |
齿轮齿条式无助力转向系统Manual Rack and Pinion
图3示出了手动(例如,无辅助)齿条和小齿轮转向系统的示意图。 这是最简单的系统。 如果仿真不需要有关转向扭矩和偏转的详细信息,建议使用此系统或其对应的“手动循环球式”。
左舵系统和右舵系统的系统定义及其方程式相同。手动齿轮齿条系统组成是:
1.转向柱惯性。它由从方向盘到小齿轮的圆柱部件组成,但不包括小齿轮.
2.转向柱摩擦。由于旋转摩擦始终与旋转方向相反的恒定转矩。当行进方向反向时,它需要一个参考角,该参考角代表所观察到的磁滞回线宽度的三分之一。
3.转向柱阻尼。与转向柱角速度成正比的扭矩,与旋转方向相反。
4.转向齿轮比。对于单比率机架组件,这通常表示为“ C因子”。 C因子是齿条在一整圈内齿条的横向位移。该关系在内部由一个表(可配置函数)表示,该表的输入为小齿轮旋转度,输出为毫米的齿条平移。在手动系统中,小齿轮角和方向盘角相同。
5.(可选)中间轴运动学。中间轴及其接头的几何形状导致输出角度超前或滞后于输入旋转,在此表示为输出旋转与输入旋转的关系表.
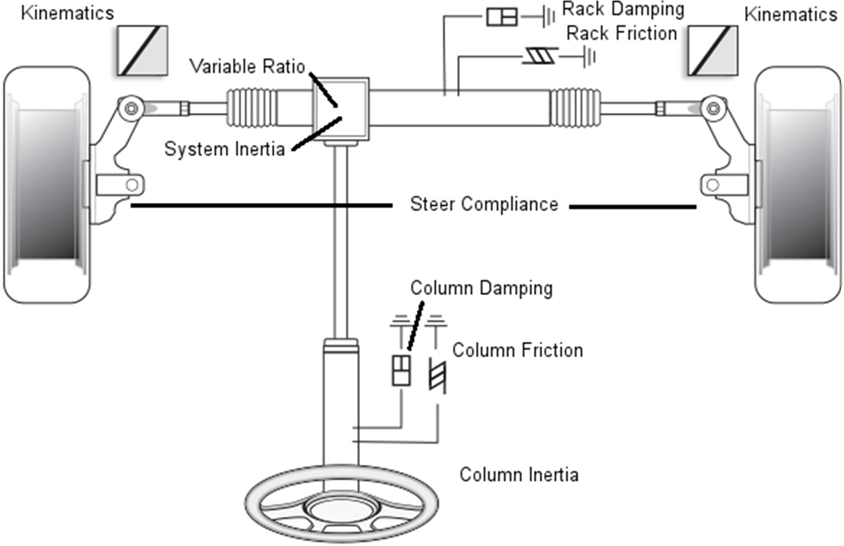 图3.手动齿轮齿条.
图3.手动齿轮齿条.
6. 系统惯量。 包括齿条,拉杆等质量的影响,表示为以小齿轮速度为索引的旋转惯性加上实际的小齿轮惯性。在齿轮系统的多体分析中,惯性和质量对单个零件运动的索引是常见的。将其视为小齿轮螺距半径上某一点的各种组件的质量可能会有所帮助.
7.齿条阻尼。 与齿条的平移速度成比例的,与运动方向相反的力。
8. 齿条摩擦。与词条的运动方向相反的恒定力。它需要一个参考长度,该长度代表方向相反时观察到的磁滞回线宽度的三分之一。
9.转向柔度。除了悬架系统的柔顺性外,转向系统还有助于提高柔顺性。悬架系统的合规性通常通过反力测试来衡量,以避免转向系统的影响。使用平行力的第二次测量包括转向和悬架柔度。从该总数中减去悬架效果,以获得转向系统的柔顺性。由于主销力矩的总和,它表示为每个车轮的转向。
10.运动学特性。这是随齿条平移而变化的车轮转向表。它包括拉杆和转向臂的几何形状。
11(可选)限制停止转向角。当通过转矩进行转向控制时,如果输入转矩超过反作用转矩,则可能会达到不切实际的转向角。这可能会导致不稳定或结果不正确。施加扭力弹簧来限制行程可以防止这种情况。当转向由输入角度控制时,它们是不必要的,应通过将其设置为零来禁用.
在该系统中,所有转向效果在运动学上都是相关的。如果通过设置转向角来控制转向,例如通过开环
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2604
2604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











