







目录
第一章 小乌龟划圆圈
第二章 小乌龟走方形
第三章 五角星
第四章 两只小乌龟
前言
本教程将教会你如何使用Python编写ROS小海龟节点来画圆。我们将使用ROS机器人操作系统也可通过改变机器人话题进行演示。通过本教程,你将学习到如何使用ROS的基本概念和Python编程来控制机器人进行简单的绘图。
一、准备工作
在开始之前,请确保你已经安装了ROS和ROS机器人的相关软件。如果你还没有安装,可以参考ROS的官方文档来进行安装。或者使用我的机器人即可。
下表展示了实现“ROS小海龟画圆Python”的整体流程:
| 步骤 | 描述 |
|---|---|
| 1 | 创建ROS工作空间 |
| 2 | 创建ROS包和节点 |
| 3 | 编写Python代码 |
| 4 | 运行ROS节点 |
下面我们将逐步介绍每个步骤需要做的事情以及相应的代码。
基本理解:
启动小乌龟节点:
rosrun turtlesim turtlesim_node
启动小乌龟按键控制:
roscar@roscar-virtual-machine:~/roscar_ws$ rosrun turtlesim turtle_teleop_key
Reading from keyboard
---------------------------
Use arrow keys to move the turtle. 'q' to quit.
此时可以通过箭头控制小乌龟移动。
我们通过list查看相关的话题:
roscar@roscar-virtual-machine:~/roscar_ws$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
这些话题(Topics)是 ROS(机器人操作系统)中用于通信的通道,下面为你介绍它们的作用。
/rosout 和 /rosout_agg
/rosout是 ROS 的日志系统话题,所有节点的屏幕输出消息(如调试信息、警告、错误等)都会发布到这个话题上,方便集中管理和查看节点运行时的各种输出信息。/rosout_agg是/rosout的聚合版本,它会将/rosout上的消息进行聚合处理后再发布,一般用于减少网络流量,提高日志收集的效率。
/turtle1/cmd_vel
这是 turtle_sim 仿真环境中的一个话题,用于接收控制海龟运动的速度指令。消息类型通常是 geometry_msgs/Twist,该消息包含线速度和角速度信息。你可以通过向这个话题发布消息来控制海龟在仿真环境中的运动方向和速度。
/turtle1/color_sensor
该话题用于发布海龟的颜色传感器数据,消息类型可能是自定义的,包含海龟当前感知到的颜色信息等,可用于颜色识别相关的任务和算法开发,在仿真环境中模拟了海龟具有颜色感知能力的场景。
/turtle1/pose
这个话题用于发布海龟在仿真环境中的位置和姿态信息,消息类型通常是 turtlesim/Pose,包含海龟的 x、y 坐标以及角度(theta)等信息,可用于获取海龟的实时位置,实现路径规划、姿态控制等功能。
在实际使用时,你可以使用 rostopic pub 命令向这些话题发布消息,来控制仿真环境中的海龟或者获取其相关信息。例如:
- 向
/turtle1/cmd_vel发布速度指令控制海龟运动:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5" -r 1
roscar@roscar-virtual-machine:~/roscar_ws$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
- 订阅
/turtle1/pose话题获取海龟位置信息:
rostopic echo /turtle1/pose
基本控制方式:
在 ROS 中控制海龟移动可以通过以下步骤实现:
1. 启动 ROS 和 turtlesim 节点
首先,确保你已经安装了 ROS 和 turtle_sim 软件包。然后在终端中运行以下命令来启动 ROS 主节点和 turtle_sim 节点:
roscore
在另一个终端中运行:
rosrun turtlesim turtlesim_node
这会在一个新的窗口中启动海龟仿真环境。
2. 使用 rostopic pub 命令控制海龟
你可以使用 rostopic pub 命令向 /turtle1/cmd_vel 话题发布速度指令来控制海龟的运动。以下是具体的方法:
- 线速度控制:控制海龟在 x 轴方向上的线速度。
- 角速度控制:控制海龟在 z 轴方向上的角速度。
例如:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.5" -r 1
linear.x:设置线速度为 1.0(单位:米/秒),使海龟向前移动。angular.z:设置角速度为 0.5(单位:弧度/秒),使海龟以顺时针方向旋转。
3. 使用 Python 脚本控制海龟
如果你需要更复杂的控制逻辑,可以编写一个 Python 脚本来控制海龟。以下是一个简单的示例:
创建:功能包
roscar@roscar-virtual-machine:~/roscar_ws/src$ catkin_create_pkg turtle_contorl rospy turtlesim geometry_msgs
Created file turtle_contorl/package.xml
Created file turtle_contorl/CMakeLists.txt
Created folder turtle_contorl/src
Successfully created files in /home/roscar/roscar_ws/src/turtle_contorl. Please adjust the values in package.xml.
创建两个文件
文件1:turtle_controller.py
#!/usr/bin/env python3
import rospy
from geometry_msgs.msg import Twist
def move_turtle():
# 初始化 ROS 节点
rospy.init_node('turtle_controller', anonymous=True)
# 创建一个出版者,发布到 /turtle1/cmd_vel 话题
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# 设置发布频率
rate = rospy.Rate(1) # 1 Hz
while not rospy.is_shutdown():
# 创建 Twist 消息
vel_msg = Twist()
vel_msg.linear.x = 1.0 # 线速度
vel_msg.angular.z = 0.5 # 角速度
# 发布消息
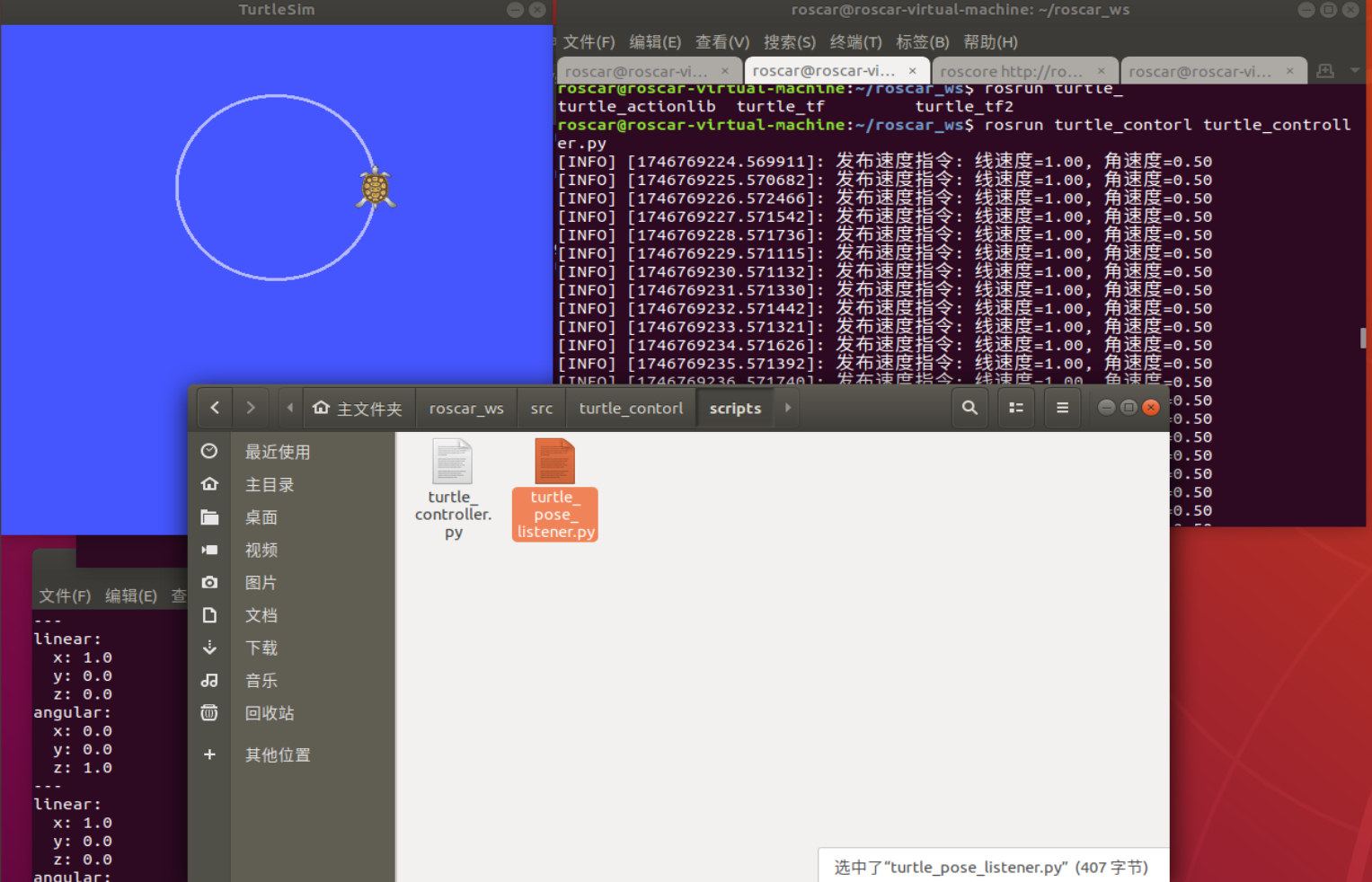
pub.publish(vel_msg)
rospy.loginfo("发布速度指令: 线速度=%.2f, 角速度=%.2f", vel_msg.linear.x, vel_msg.angular.z)
# 按照设定的频率循环
rate.sleep()
if __name__ == '__main__':
try:
move_turtle()
except rospy.ROSInterruptException:
pass
4. 订阅海龟的位置信息
你可以订阅 /turtle1/pose 话题来获取海龟的实时位置和姿态信息。以下是一个简单的 Python 脚本示例:
文件2:
#!/usr/bin/env python3
import rospy
from turtlesim.msg import Pose
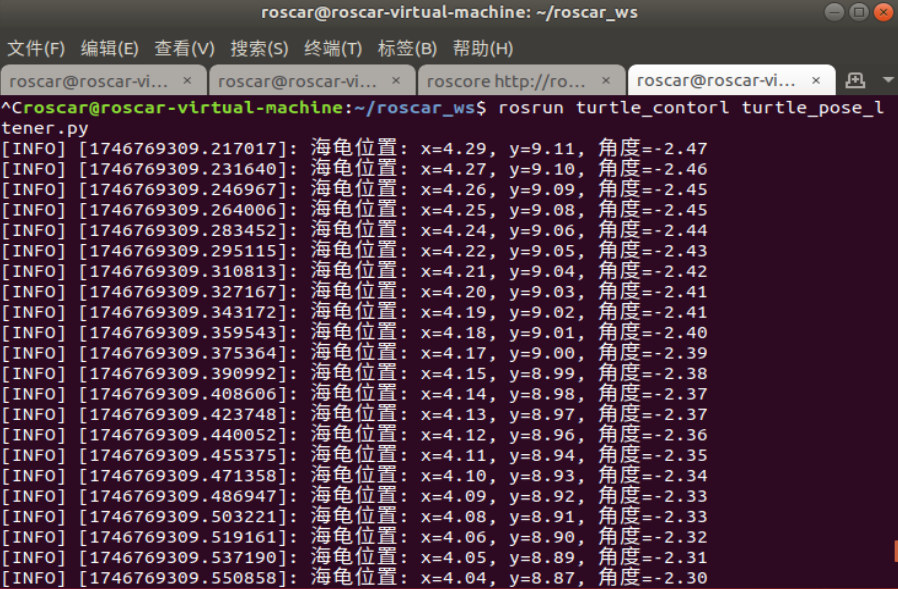
def pose_callback(pose_msg):
rospy.loginfo("海龟位置: x=%.2f, y=%.2f, 角度=%.2f", pose_msg.x, pose_msg.y, pose_msg.theta)
def pose_listener():
rospy.init_node('turtle_pose_listener', anonymous=True)
rospy.Subscriber('/turtle1/pose', Pose, pose_callback)
rospy.spin()
if __name__ == '__main__':
pose_listener()
总结
通过 rostopic pub 命令或编写 Python 脚本,你可以轻松控制海龟在 ROS 中移动。控制海龟的核心是向 /turtle1/cmd_vel 话题发布速度指令,通过调整线速度和角速度来实现不同的运动效果。同时,你可以订阅 /turtle1/pose 话题来获取海龟的实时位置和姿态信息,以便进行更复杂的控制和路径规划。
launch实现
在ROS中,你可以创建一个launch文件来启动turtle_sim节点并直接控制小乌龟转圈。以下是一个示例:
创建一个ROS包
首先,确保你已经创建了一个ROS包。如果没有,可以使用以下命令创建一个包:
catkin_create_pkg turtle_sim_control rospy turtlesim
创建一个Python脚本
创建一个Python脚本 turtle_move.py,用于控制小乌龟转圈:
touch ~/catkin_ws/src/turtle_sim_control/scripts/turtle_move.py
然后在文件中添加以下代码:
#!/usr/bin/env python3
import rospy
from geometry_msgs.msg import Twist
def move_turtle():
# 初始化ROS节点
rospy.init_node('turtle_mover', anonymous=True)
# 创建一个出版者,发布到/turtle1/cmd_vel话题
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# 设置发布频率
rate = rospy.Rate(10) # 10 Hz
# 创建Twist消息
vel_msg = Twist()
vel_msg.linear.x = 1.0 # 线速度
vel_msg.angular.z = 1.0 # 角速度
while not rospy.is_shutdown():
# 发布消息
pub.publish(vel_msg)
rospy.loginfo("发布速度指令: 线速度=%.2f, 角速度=%.2f", vel_msg.linear.x, vel_msg.angular.z)
# 按照设定的频率循环
rate.sleep()
if __name__ == '__main__':
try:
move_turtle()
except rospy.ROSInterruptException:
pass
确保脚本可执行:
chmod +x ~/catkin_ws/src/turtle_sim_control/scripts/turtle_move.py
创建一个launch文件
创建一个launch文件 turtle_move.launch:
touch ~/catkin_ws/src/turtle_sim_control/launch/turtle_move.launch
在文件中添加以下代码:
<launch>
<!-- 启动 turtlesim 节点 -->
<node pkg="turtlesim" type="turtlesim_node" name="turtle_sim" output="screen" />
<!-- 启动控制海龟的Python脚本 -->
<node pkg="turtle_sim_control" type="turtle_move.py" name="turtle_mover" output="screen" />
</launch>
构建工作空间
在运行之前,构建你的ROS工作空间:
cd ~/catkin_ws
catkin_make
运行launch文件
使用以下命令运行launch文件:
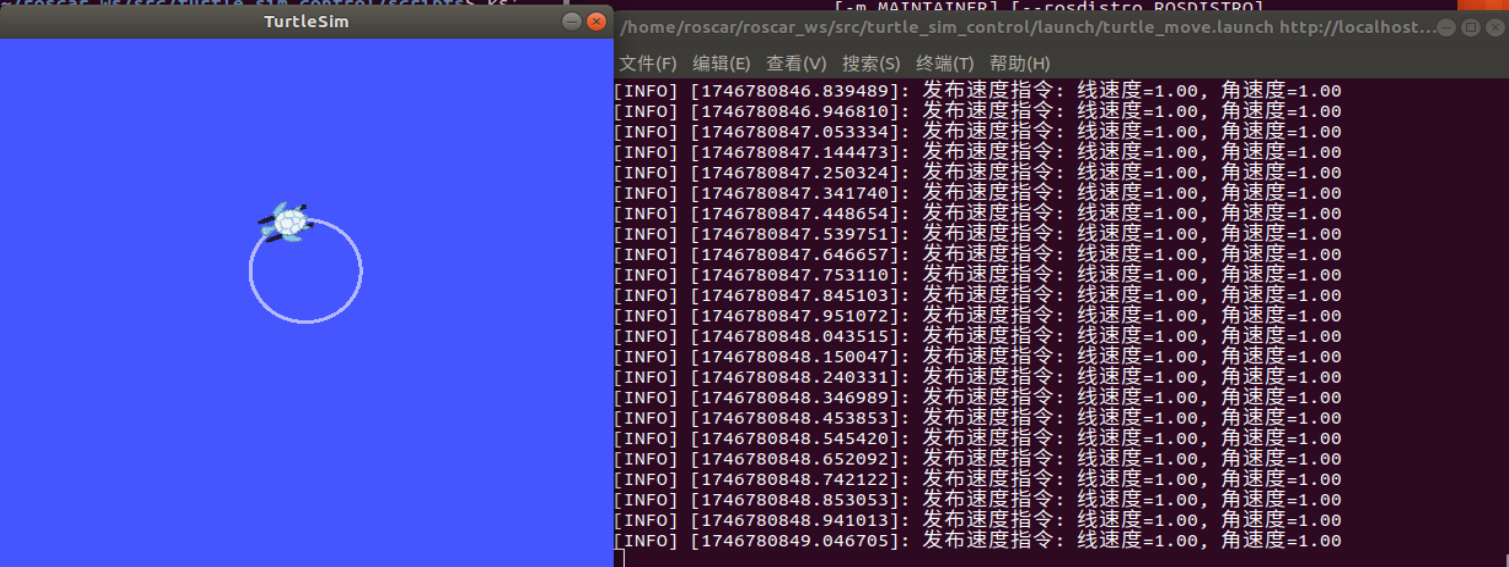
roslaunch turtle_sim_control turtle_move.launch
执行上述命令后,turtlesim仿真环境会启动,并且小乌龟会按照设定的速度转圈。你可以通过修改turtle_move.py中的vel_msg.linear.x和vel_msg.angular.z值来调整线速度和角速度,以实现不同的转圈效果。
画圈的具体细节:
步骤一:创建ROS工作空间
首先,我们需要创建一个ROS工作空间来存放我们的代码和配置文件。打开终端并执行以下命令:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
这将创建一个名为 catkin_ws 的工作空间,并在其中创建一个名为 src 的文件夹。
步骤二:创建ROS包和节点
接下来,我们需要创建一个ROS包和一个ROS节点。在终端中执行以下命令:
cd ~/catkin_ws/src
catkin_create_pkg turtlebot3_draw_circle rospy
cd ~/catkin_ws
catkin_make
这将创建一个名为 turtlebot3_draw_circle 的ROS包,并将其依赖关系设置为rospy。
然后,我们需要创建一个名为draw_circle.py 的 Python 文件,并将其保存在 ~/catkin_ws/src/turtlebot3_draw_circle/scripts/ 目录下。
步骤三:编写Python代码
在draw_circle.py文件中,我们将编写代码来控制小海龟机器人画圆。以下是完整的Python代码:
#!/usr/bin/env python3
import rospy
from geometry_msgs.msg import Twist
def draw_circle():
rospy.init_node('draw_circle_node', anonymous=True)
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
rate = rospy.Rate(10)
move_cmd = Twist()
move_cmd.linear.x = 0.4
move_cmd.angular.z = 0.5
while not rospy.is_shutdown():
pub.publish(move_cmd)
rate.sleep()
if __name__ == '__main__':
try:
draw_circle()
except rospy.ROSInterruptException:
pass
这段代码首先导入了rospy和Twist消息类型,然后定义了一个名为draw_circle的函数。在函数内部,我们初始化了ROS节点,创建了一个名为draw_circle_node的节点,并创建了一个名为/cmd_vel的消息发布者来控制机器人的运动。
然后,我们定义了一个Twist类型的变量move_cmd,并设置其linear.x和angular.z属性来控制机器人的线速度和角速度。在while循环中,我们不断发布这个消息,以使机器人保持正常运动。
最后,在if name == ‘main’:语句中,我们调用了draw_circle函数来启动ROS节点。
步骤四:运行ROS节点
最后,我们需要在终端中运行ROS节点来控制机器人进行画圆。执行以下命令:
roscore

启动小乌龟:
rosrun turtlesim turtlesim_node

启动转圈圈程序:
cd ~/catkin_ws
source devel/setup.bash
rosrun turtlebot3_draw_circle draw_circle.py

这将运行我们之前编写的Python脚本,并开始控制小乌龟画圆。你将看到机器人围绕一个圆形轨迹运动。
总结
在本教程中,我们通过使用ROS和Python编写了一个简单的程序来控制小乌龟机器人画圆。

















 1958
1958

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









