








使用catkin_create_qt_pkg快速创建qt-ros功能包
参考网址:
qt_create:http://wiki.ros.org/qt_create
qt_ros:https://github.com/stonier/qt_ros/tree/0.2.9
tutorials:http://wiki.ros.org/qt_ros/Tutorials
对于kinetic,需要自行编译并使用。jade及之前版本都可以直接安装。
~/catkin_ws/src$ catkin_create_qt_pkg hiqtros
~/catkin_ws/src$ qtcreator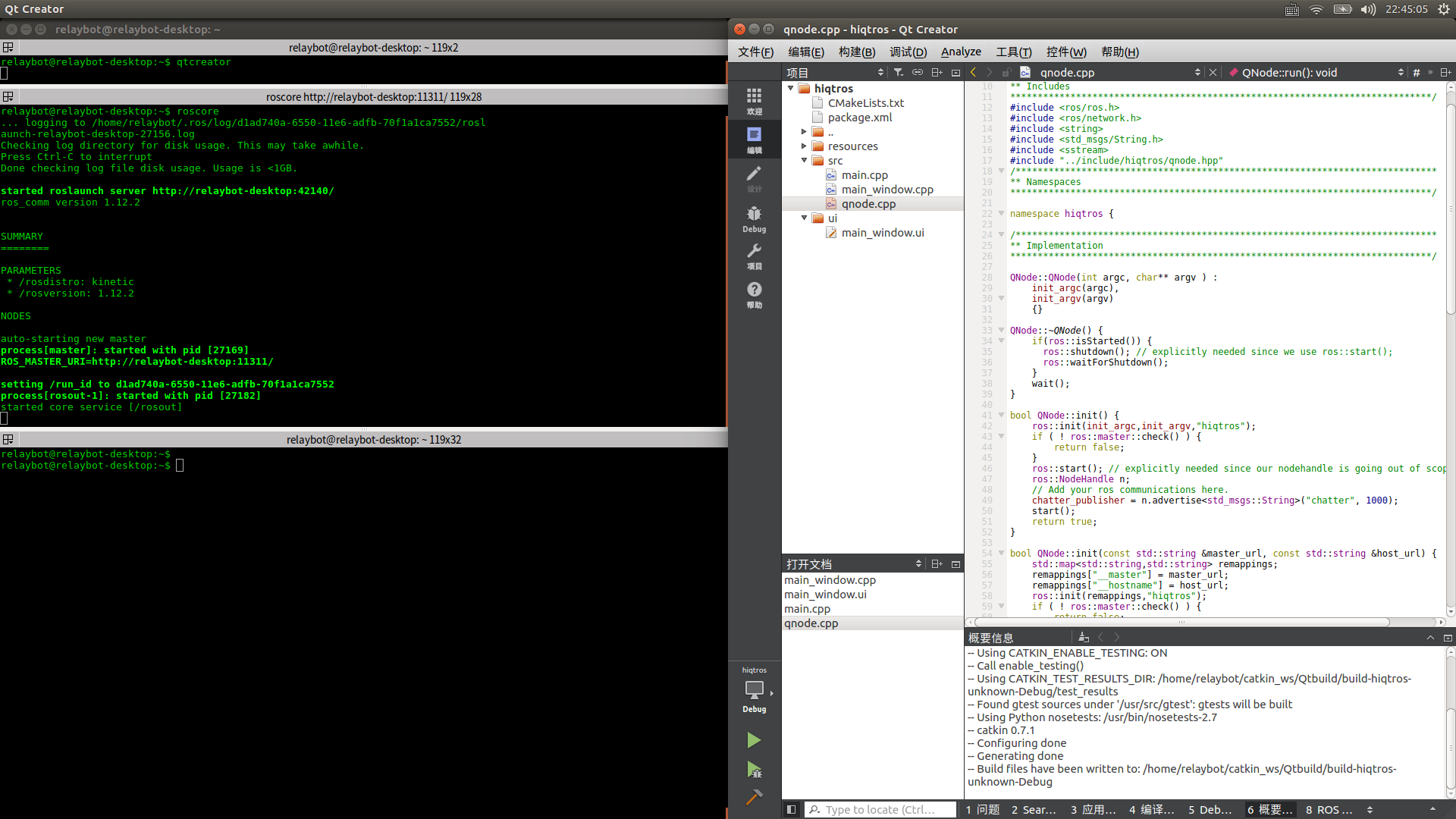
编译后,运行:

-End-
















 2748
2748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











