







占据栅格地图

参考
https://zhuanlan.zhihu.com/p/21738718
Octomap地图
将三维空间建模分割成许多的小方块,如果将每个小方块的每个面切成两片,那么这个小方块就会变成同样大小的八个小方块。将该步骤不断重复,直到最后的方块大小达到建模的最高精度。在该过程中,将"从一个节点展开成八个子节点",那么,整个空间从最大空间细分到最小空间的过程,就是一棵八叉树。
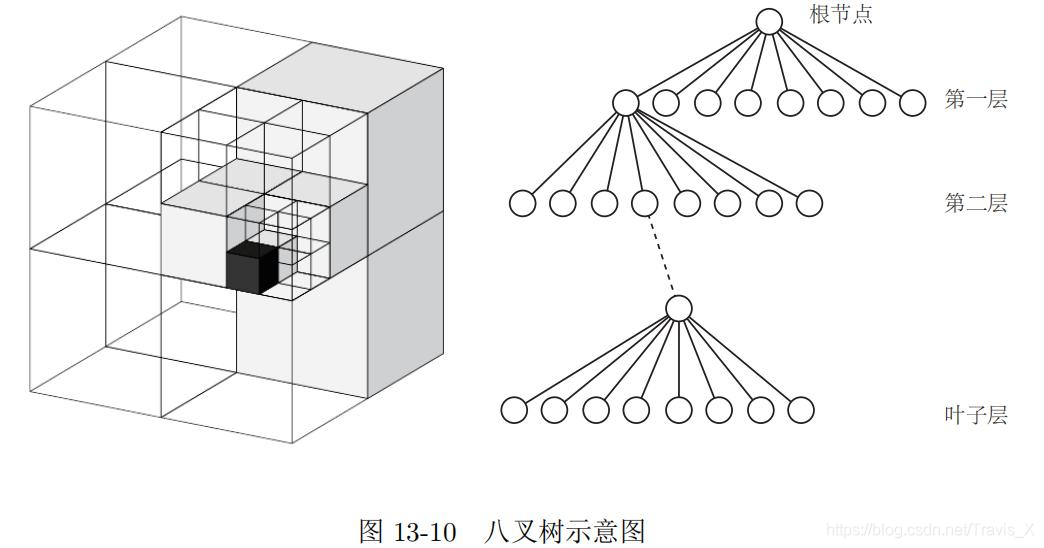
每个小方块需要表达出它是否被占据的状态,当放个没有被占据时,就没必要进行下一步的展开。将每个方块用一个浮点数来x表示,其中x∈[0,1]来表示该位置被占据的概率,初始值取0.5。
x一开始取0.5,表示的是不确定的未知状态。如果不断观测到它被占据,则x值将不断增大,反之则不断减小。
深蓝学院运动规划之Octomap讲解视频
https://www.bilibili.com/video/BV1cQ4y1P7Xh?from=search&seid=5989513482820660839
开源工具
http://wiki.ros.org/octomap_server
Voxel hashing 体素哈希
通过二重哈希表来存储障碍物边界的每个voxel(单元栅格)

体素哈希
https://github.com/niessner/VoxelHashing
用于基于RGBD的3D视觉图像重建:
https://www.robots.ox.ac.uk/~victor/infinitam/
TSDF map 截断的有符号距离函数
假设有个相机传感器对环境进行观测,障碍物是一个曲面,相机与障碍物之间存在一个距离场,距离场里的数值表示当前点距离临近障碍物最接近的点之间的距离,障碍物外面的数值为正,障碍物内部为负数,并且可以以距离的大小来进行截断,比如正负两米内的点保留,不关心两米以外的点。

典型应用:
https://github.com/personalrobotics/OpenChisel
深蓝学院运动规划之TSDF map讲解视频
https://www.bilibili.com/video/BV1Xi4y1471W/?spm_id_from=autoNext
ESDF map 欧式有符号距离函数
与TSDF的区别是TSDF不截断的话,就是ESDF。
当进行轨迹规划时,需要知道机器人距离障碍物的梯度,所以不需要进行截断。

开源工具:
1)全局的ESDF创建
https://github.com/ethz-asl/voxblox
https://github.com/HKUST-Aerial-Robotics/FIESTA 性能比voxblox更好
2)局部的ESDF创建
港科大-无人机做局部地图规划:https://github.com/HKUST-Aerial-Robotics/Teach-Repeat-Replan
深蓝学院运动规划之ESDF map讲解视频
https://www.bilibili.com/video/BV14K4y1t7bz?from=search&seid=5989513482820660839
其他
Free-space Roadmap
随机采样的概率路线图,用凸多面体来表示路径点,再进行连接。

开源工具:
https://github.com/HKUST-Aerial-Robotics/Teach-Repeat-Replan
Voronoi Diagram Map
利用ESDF提取地图的骨架–拓扑结构。
 开源工具:
开源工具:
https://github.com/ethz-asl/mav_voxblox_planning


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











