







 本文详述了如何利用Eigen库中的四元数进行空间坐标转换,包括从一个坐标系到另一个坐标系的旋转和平移计算,以及逆向求解的过程。通过具体示例,演示了四元数在机器人定位和姿态估计中的应用。
本文详述了如何利用Eigen库中的四元数进行空间坐标转换,包括从一个坐标系到另一个坐标系的旋转和平移计算,以及逆向求解的过程。通过具体示例,演示了四元数在机器人定位和姿态估计中的应用。
本文主要介绍使用Eigen库中的四元数进行空间坐标的转换。
Eigen库的结构体对应的名称如下:
旋转矩阵(3×3) Eigen::Matrix3d
旋转向量(3×1)Eigen::AngleAxisd
欧式变换矩阵(4×4) Eigen::Isometry3d
四元数(4×1)Eigen::Quaterniond
坐标系转换如图
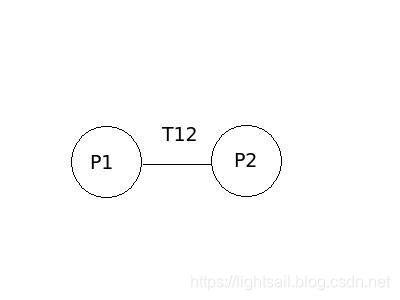
假设机器在p1处在世界坐标系下的位姿为(x,y,z,roll,pitch,yaw)=(1,1,0,0,0,0,),p2处世界坐标系下的位姿(x,y,z,roll,pitch,yaw)=(2,2,0,0 ,0,45)
1.已知p1,p2求p1 和p2之间的转换T12
此例中T12结果简单表示为(1,1,0,0,0,45)
程序如下:
#include<iostream>
#include<eigen3/Eigen/Core>
#include<eigen3/Eigen/Geometry>
int main()
{
//1.p1 world position
double p1yaw=0;
double p1x=1;
double p1y=1;
Eigen::AngleAxisd rotzp1(p1yaw*M_PI/180, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t1= Eigen::Vector3d(p1x,p1y, 0);
Eigen::Quaterniond q1=Eigen::Quaterniond(rotzp1);
//cout<<"q1.vec()"<<q1.vec()<<endl;
cout<<"p1 eular angle in world axis"<<(180/M_PI)*q1.matrix().eulerAngles(0,1,2)<<endl;
cout<<"p1 position in world axis"<<t1<<endl;
//2.p2 world position
double p2yaw=45;
double p2x=2;
double p2y=2;
Eigen::AngleAxisd rotzp2(p2yaw*M_PI/180, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t2= Eigen::Vector3d(p2x,p2y, 0);
Eigen::Quaterniond q2=Eigen::Quaterniond(rotzp2);
//cout<<"q1.vec()"<<q1.vec()<<endl;
cout<<"p2 eular angle in world axis"<<(180/M_PI)*q2.matrix().eulerAngles(0,1,2)<<endl;
cout<<"p2 position in world axis"<<t2<<endl;
// 3.calculate T12
//q1*q12=q2
Eigen::Quaterniond q12=q1.inverse()*q2;
cout<<"rotaion from p1 to p2 "<<(180/M_PI)*q12.matrix().eulerAngles(0,1,2)<<endl;
// Eigen::Vector3d t2=t1+q1.toRotationMatrix()*t12;
Eigen::Vector3d t12=q1.toRotationMatrix().inverse()*(t2-t1);
cout<<"translation base on p1 aixs t12="<<t12<<endl;
}
2已知p1和t12求p2
假设机器在p1处在世界坐标系下的位姿为(x,y,z,roll,pitch,yaw)=(1,1,0,0,0,0,),p1 和p2之间的转换(p1经过旋转和平移)为t12表示为(1,1,0,0,0,45),
求p2处世界坐标系下的位姿(x,y,z,roll,pitch,yaw)?
结果为(2,2,0,0,0,45)
程序如下:
#include<iostream>
#include<eigen3/Eigen/Core>
#include<eigen3/Eigen/Geometry>
using namespace std;
int main()
{
// //1.p1 world position
double p1yaw=0;
double p1x=1;
double p1y=1;
Eigen::AngleAxisd rotzp1(p1yaw*M_PI/180, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t1= Eigen::Vector3d(p1x,p1y, 0);
Eigen::Quaterniond q1=Eigen::Quaterniond(rotzp1);
//cout<<"q1.vec()"<<q1.vec()<<endl;
cout<<"p1 eular angle"<<(180/M_PI)*q1.matrix().eulerAngles(0,1,2)<<endl;
//2. t12 value
double t12yaw=45;
double t12x=1;
double t12y=1;
Eigen::AngleAxisd rott12(t12yaw*M_PI/180, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t12= Eigen::Vector3d(t12x,t12y, 0);
Eigen::Quaterniond q12=Eigen::Quaterniond(rott12);
cout<<"t12 rotation eular angle "<<(180/M_PI)*q12.matrix().eulerAngles(0,1,2)<<endl;
// cout<<"q12.vec()"<<q12.vec()<<endl;
// 3.calculate p2 world positon
Eigen::Quaterniond q2=q1*q12;
// cout<<" q2 vector " <<q2.vec()<<endl;
Eigen::Vector3d t2=t1+q1.toRotationMatrix()*t12;
cout<<"t2="<<t2<<endl;
cout<<"t2 eular angle "<<(180/M_PI)*q2.matrix().eulerAngles(0,1,2)<<endl;
}
参考文献
Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换
https://blog.csdn.net/yang__jing/article/details/82316093

















 1354
1354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









