







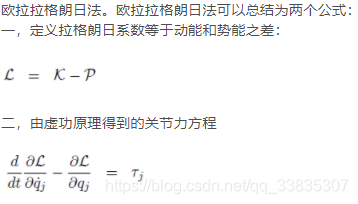
动力学普遍方程及拉格朗日方程 这个可以看看
《机器人动力学与控制》第九章——动力学 9.1初探欧拉拉格朗日方程法 讲出求关节力这一作用,有实例可以看看
求得关节力
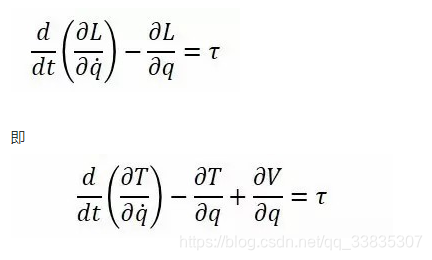
大略了解一下拉格朗日力学之后,我们就可以思考怎样用它来求解机械臂的动力学了。我们最重要的工具当然是上面最后一个式子,把它写成向量的形式:
拉格朗日方程,q是广义坐标,Q是广义力
第一个问题是,机械臂动力学所用的“广义坐标”是什么?注意到我们想要求的是关节输出的力与关节运动的关系,把关节空间选定为广义坐标看来是非常自然而然的事情(选广义坐标有一定标准,这里不讲)。这样,关节位置向量即为向量q,关节输出的扭矩则是广义力Q。用机械臂常用的符号表示,我们有
一个重要的点是选取广义坐标(和对应的广义力)
Lagrangian Equations of Motion, Conservative Forces
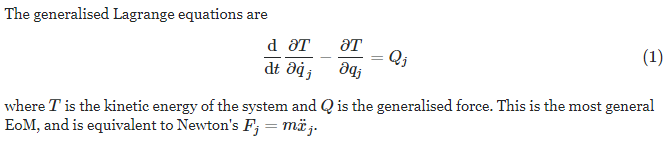
q是广义坐标,Q是广义力。

















 9657
9657

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









