










作者毕业之后,从事了vr与ar相关的工作。
见过的最短的tro论文,连摘要都简单到只有6行。直接法的概念,直接法的问题:不能重复观测。本文提出了一种新方法,可以处理重复观测。
Introduction
PBA的基本概念: 使用光度误差进行优化,关键帧的选择限制在一个小范围里。在梯度大的地方选点。这些点只保存在那个关键帧中。没有显式的数据关联。因为关联就在优化的过程中做了。
当前PBA的缺点:不能使用历史观测,辅助估计点的深度。
VSLAM创建了持久的地图点,这种方式使得其漂移就会减少。
DIRECT MAPPING
前端:跟踪点、提供初始值; 后端:确定关键帧、优化关键帧与地图点
关键帧是否激活的判断方法是利用共视图,每个关键帧存储的内容
优化参数与参数表示
A 光度模型
在一个小patch上进行光度差异的作差。
B PBA
每次关键帧创建后,就会来一次平差
LMCW: LOCAL MAP COVISIBILITY WINDOW
从图二来看,基于时间的就是当前时刻的几帧,而共视的就是空间关系。
第一部分利用的就是Nt帧的滑窗;这里介绍了两条选择关键帧的条件。
第二部分的东西暂时不用,所以先不管了。
V Robust non-linear PBA
这一部分先不管了
VI Front-End
初始化

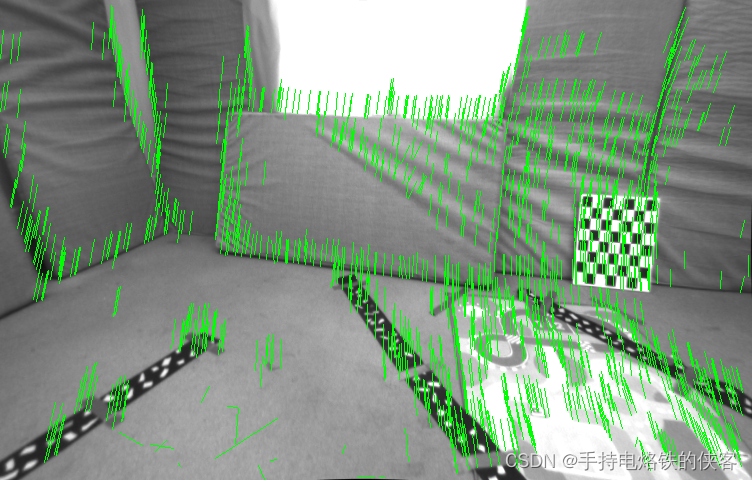
左图为第一帧,右图为第二帧,绿线就是光流画出来的像素变化
AffineLight仿射光
We include an affine brightness transfer model to handle the camera automatic
gain control and changes in scene illumination.
在状态量中,除了pose, 还有个这个?
The LMCW (Sec. IV) selects which keyframes are active and
form the local window. Once a keyframe is active, all its parameters
(pose and affine light model) and associated points (inverse depth)
are optimized by the PBA















 861
861











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











