










 博客介绍了激光雷达的扫描参数。扫描频率即转速,其输出的“点云”图像中,相邻两点夹角为角分辨率。一幅点云图像为一帧,帧率是每秒电机旋转圈数。因采样率一定,帧率与角分辨率成反比,还给出了采样率的计算示例。
博客介绍了激光雷达的扫描参数。扫描频率即转速,其输出的“点云”图像中,相邻两点夹角为角分辨率。一幅点云图像为一帧,帧率是每秒电机旋转圈数。因采样率一定,帧率与角分辨率成反比,还给出了采样率的计算示例。
给个面子,点赞转发评论,哈哈!
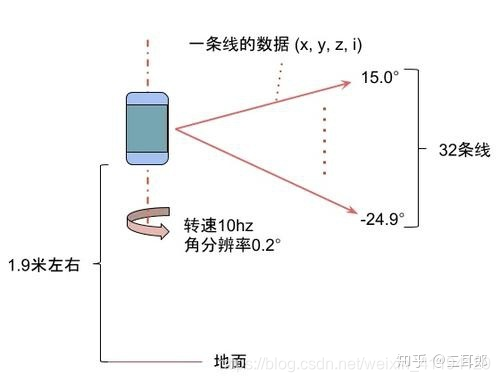
扫描频率是转速的意思,10Hz就是一秒转10圈。
激光雷达输出的图像也被称为“点云”图像,相邻两个点之间的夹角就是角分辨率。
一幅点云图像代表一帧,对应到激光雷达内部就是电机旋转一圈完成扫描。帧率即代表一秒钟内激光雷达电机旋转的圈数,也就是每秒钟完成一圈扫描的次数。
由于激光雷达的采样率是一定的,因此帧率越高,角分辨率越低;帧率越低,角分辨率越高。
采样率表示激光雷达每秒钟进行有效采集的次数,可直观理解为一秒内产生的点云数目。采样率可以通过角分辨率和帧率计算:
角分辨率0.08°时,每一帧的点云数目:360°/0.08°= 4500;
每秒10帧,则每秒的点云数目:4500×10=45000;
所以PAVO的采样率为45kHz。
参考文献:
https://www.leiphone.com/news/201801/oySuWNzftbNrWwpv.html



















 2548
2548

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











