






力控机器人本质上属于协作机器人中的一种,其每个关节都带有力矩传感器; [1] 广泛应用在工业、医疗、新零售领域或智能厨房行业。
Franka Emika:
力控机器人每个关节都带有力矩传感器
力矩传感器提供了一种提高机器人力控性能的途径。

更加精确地控制施加在末端执行器(End-Effector)的力比控制末端执行器的位置更加重要时,力控就必须得到引入,即:单单将关节目标位置(Target Position)作为控制输出量远远不能达到应用的要求,必须引入力矩/力控制输出量,或者将力矩/力作为闭环反馈量引入控制。
力控优点:
- 是需要与安全地与人类做物理上的交互(Human Robot PhysicalInteraction)
- 是需要做到柔顺的阻抗控制(Impedance Control)
- 是需要具备在未知环境(Un-perceptive environment)中的运动的能力
- 是需要具备快速的动态控制(Dynamical Control)调整能力
高减速比的减速器具有较大的静摩擦力特性
UR3, xMate, iiwa:

_____________________
阻抗控制与导纳控制:
阻抗控制和导纳控制的主要区别为如下因果关系:阻抗控制是基于测量的位置(差值)来控制外力,而导纳控制则是基于测量的外力(差值)来控制位置;
__________________
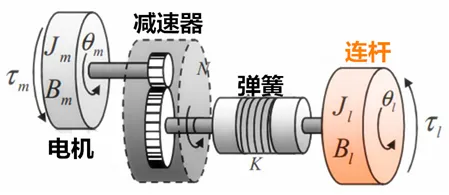
力矩传感器与SEA
力矩传感器的刚度相较于SEA已经非常非常高了,SEA刚度一般是4kNm/rad(iit用的)10kNm/rad(Kuka LWR用的)这个数量级附近的。As we know, 柔性的引入会对驱动器频响和位置控制精度带来负面影响。
——————————————————
参考文献链接:
Unitree Z1 6轴谐波 力控 灵巧机械臂 1.6万元起打开新世界的大门! https://mp.weixin.qq.com/s/BS5ZDr6aydSSsJysMLmVPg
https://mp.weixin.qq.com/s/BS5ZDr6aydSSsJysMLmVPg


















 5338
5338

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









