







显示命令到terminal中,然后等到动作结束,用鼠标拷贝出来到txt文件,而且,最重要的问题是,由于滚屏,你只能拷贝部分运动信息,很快就舍弃这种做法了。
后来,就想起以前用命令行重定向将信息保存到了文本中,于是就很好的解决了数据保存问题。
- rostopic echo /joint_states > record2.txt
-
1. 背景
因为在为youbot添加FollowJointTrajectory 的client之后,仿真环境中的动作与实际有出入,因此想看看机械臂的实际动作曲线。而在ROS中,内置的rqt_plot是可以提供绘图功能的,而后来发现rqt_plot的功能比较简单,随着数据量的增大,查看起来比较费劲。于是就有了后来的导入matlab中分析的部分。
2.rqt_plot绘图
照例,我们找到官网的相关部分,有个基础理解:http://wiki.ros.org/rqt_plot
- rqt_plot /turtle1/pose/x:y:z
- rqt_plot /turtle1/pose/x /turtle1/pose/y /turtle1/pose/z
特别注意上面的第一句,它就是下面的简写,同一个topic下的直接冒号就好,不用输入那么多的文字。在这里我为了避免每次要去动机械臂,将joint_states这个topic的信息已经保存为了bag文件,录的动作是我上一篇文章,actionlib中的动作的一部分,大概是从home到伸直的一部分。使用指令(参看《a gentle introduction to ROS》P135页)
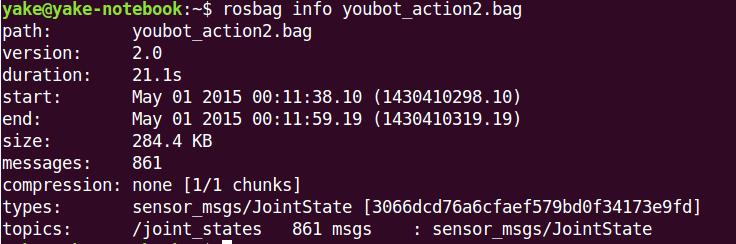
-O(是字母O, 并非数字0,它表示输出文件(output),后面跟的是你的输出文件的名字,我这里是youbot_action2.bag),下面是我的bag的一些基本信息:- rosbag record -O youbot_action2.bag /joint_states
一共21.1s,包含了861条信息
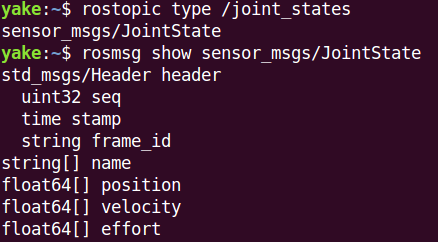
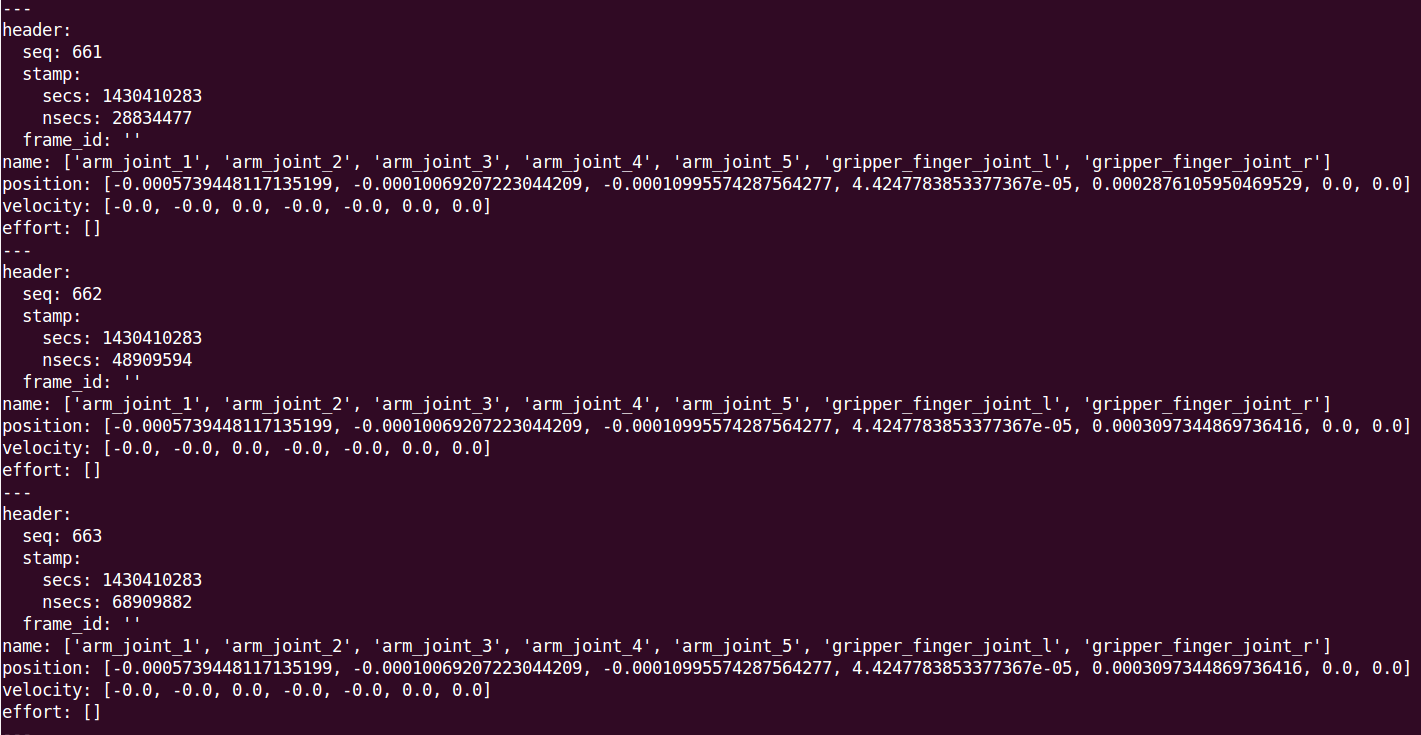
我们查看一下数据内容
然后开启一个terminal,回放数据rosbag play youbot_action2.bag --clock,--clock表示使用simulate time,具体可以参考http://wiki.ros.org/Clock 。再打开另外一个,开启rqt_plot,用命令
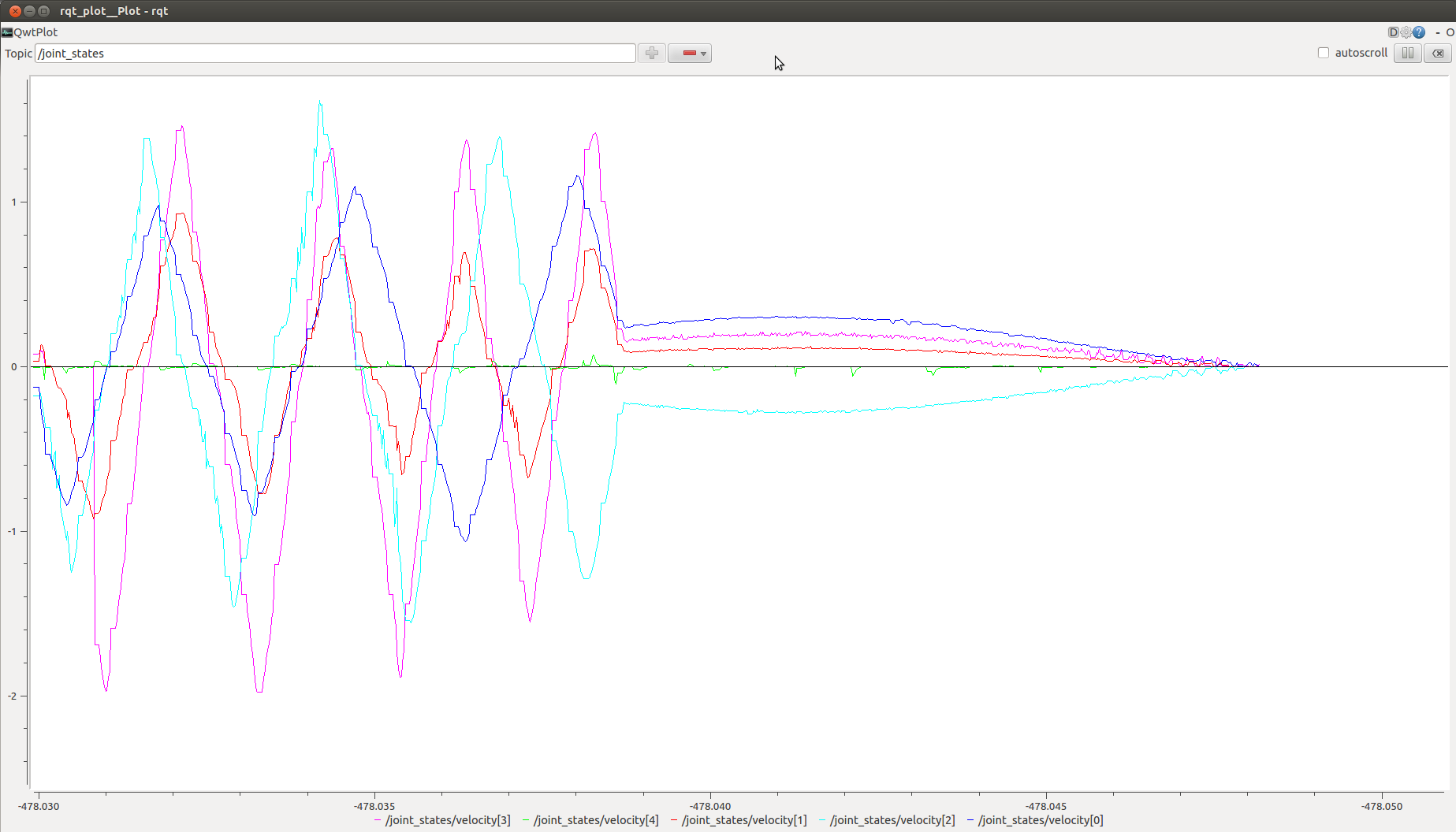
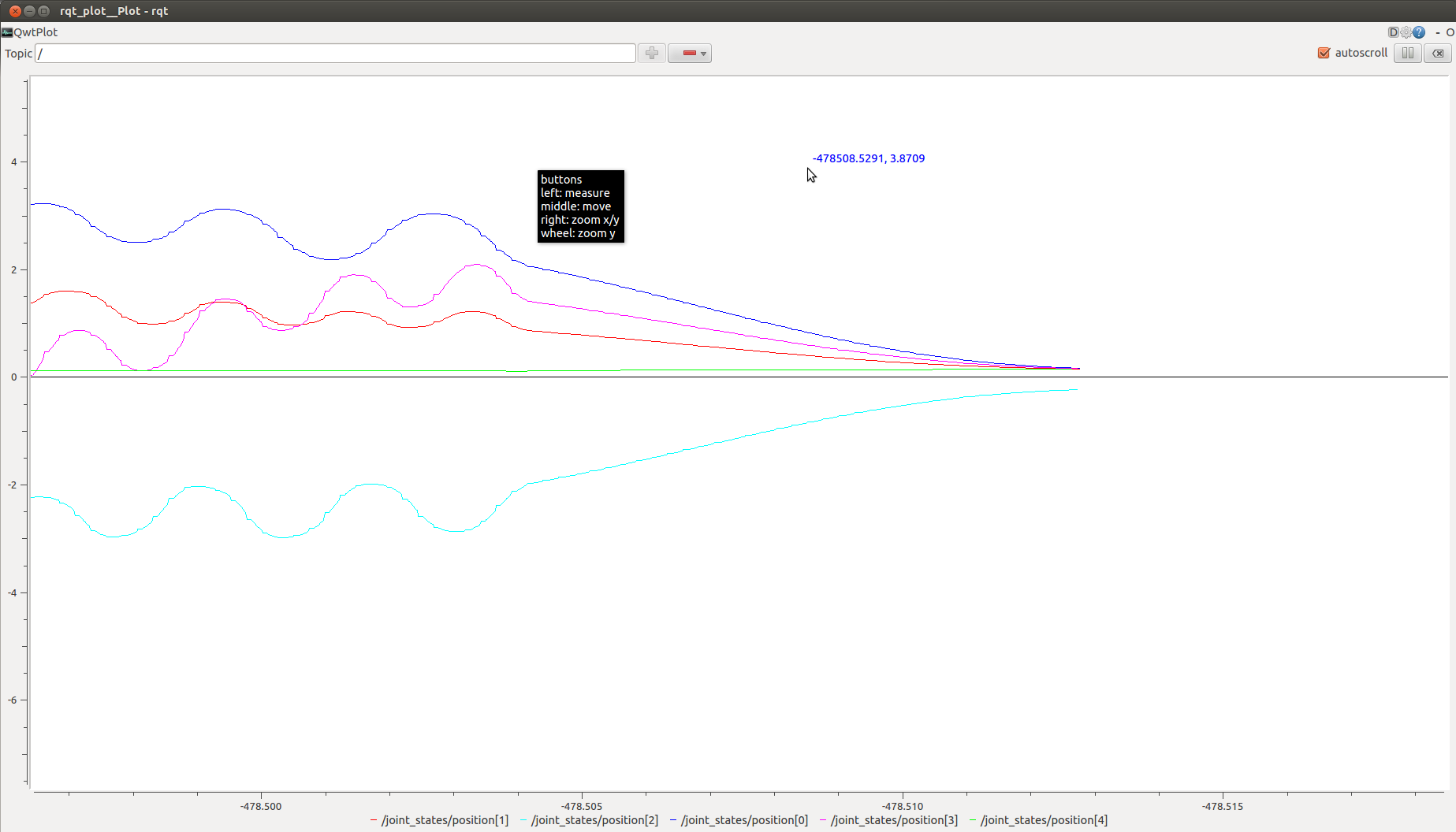
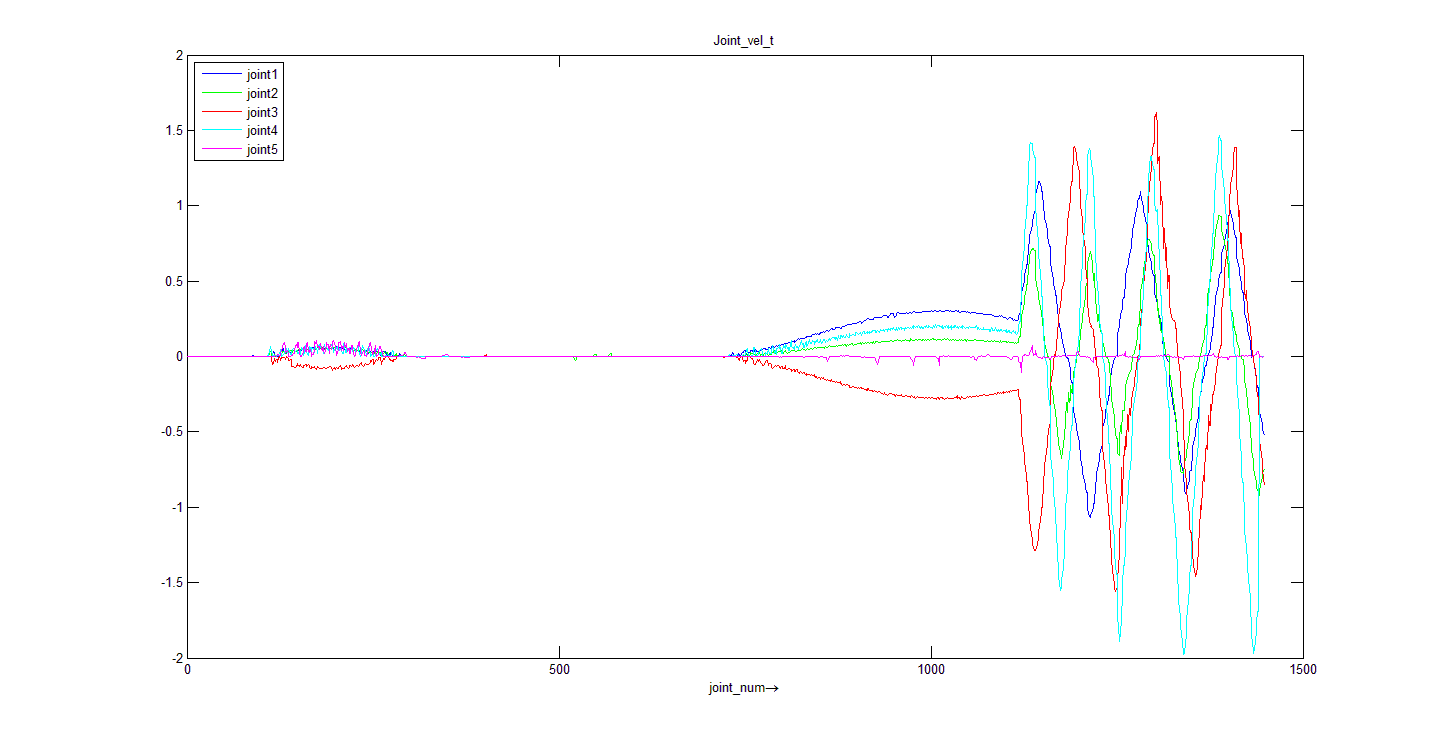
- rqt_plot /joint_states/velocity[0]:velocity[1]:velocity[2]:velocity[3]:velocity[4]
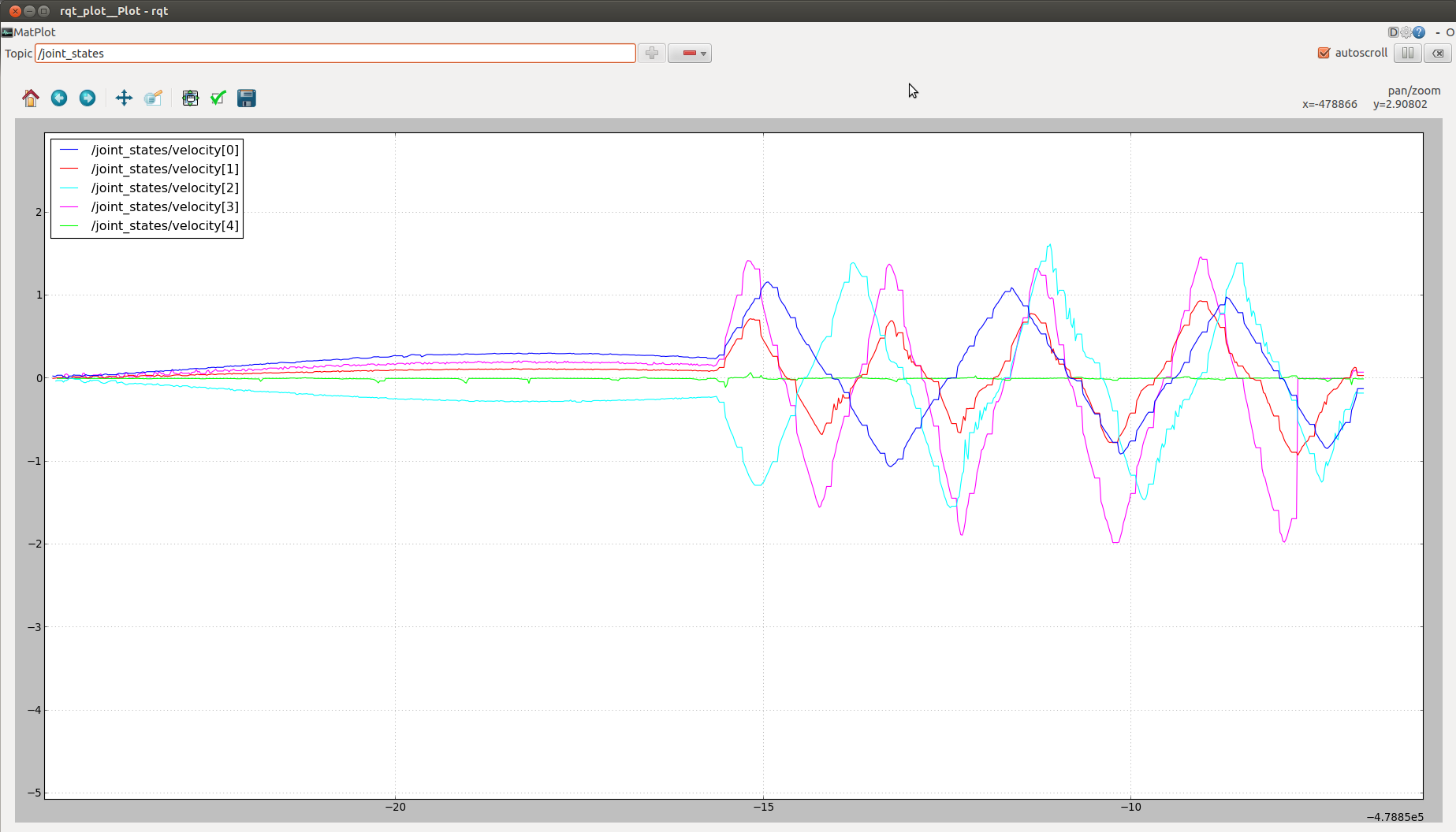
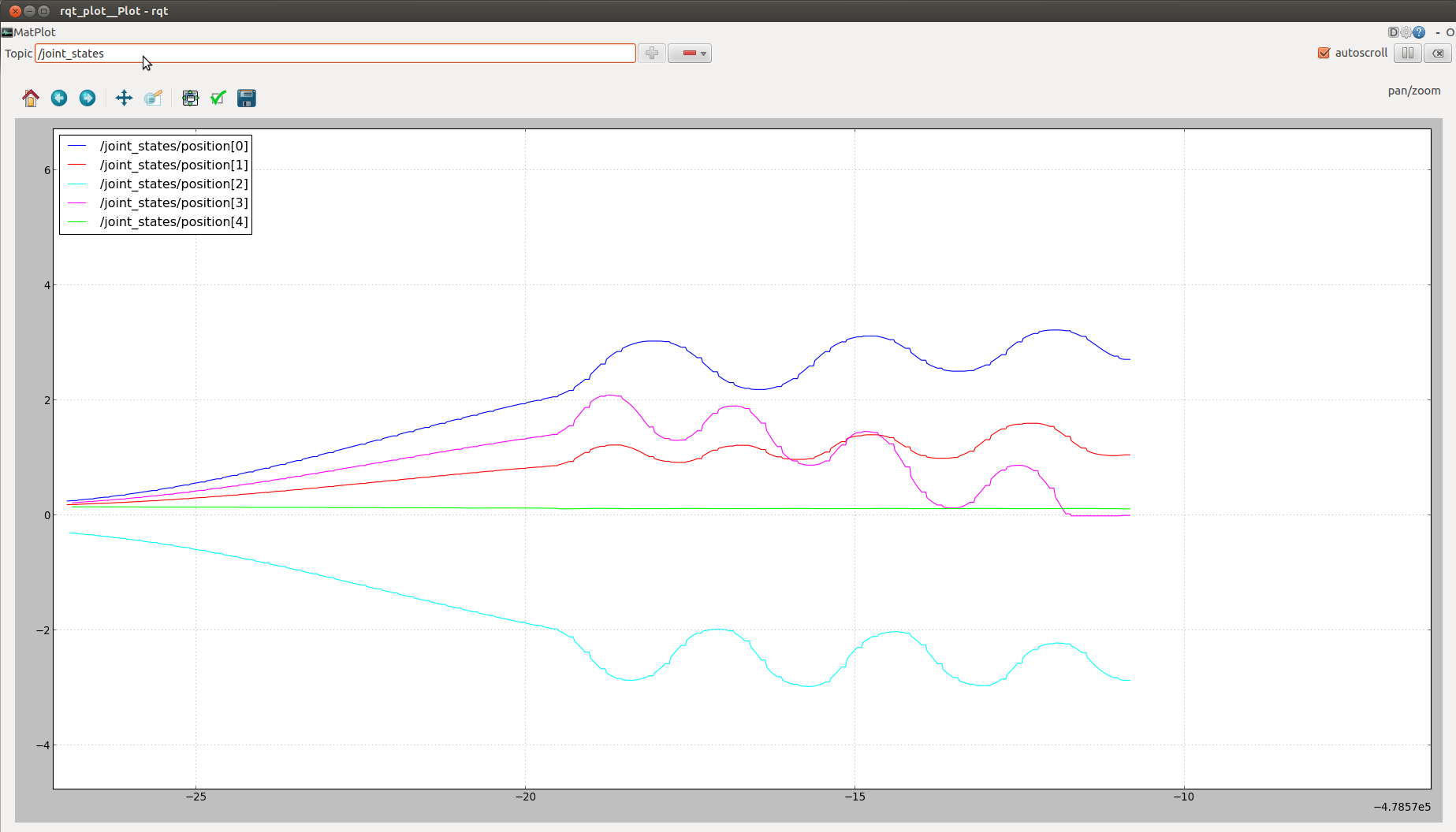
因为,youbot机械臂是五个自由度,这里我们用标号0-4来引用每一个(用QwtPlot画出来的)用MatPlot画出来的,可以看出他们刚好是左右颠倒的,我们的这个bag文件,有大概20s。右键按住鼠标上下或左右滑动进行缩放。
同理,我们也可以找出各个关节的一些信息:
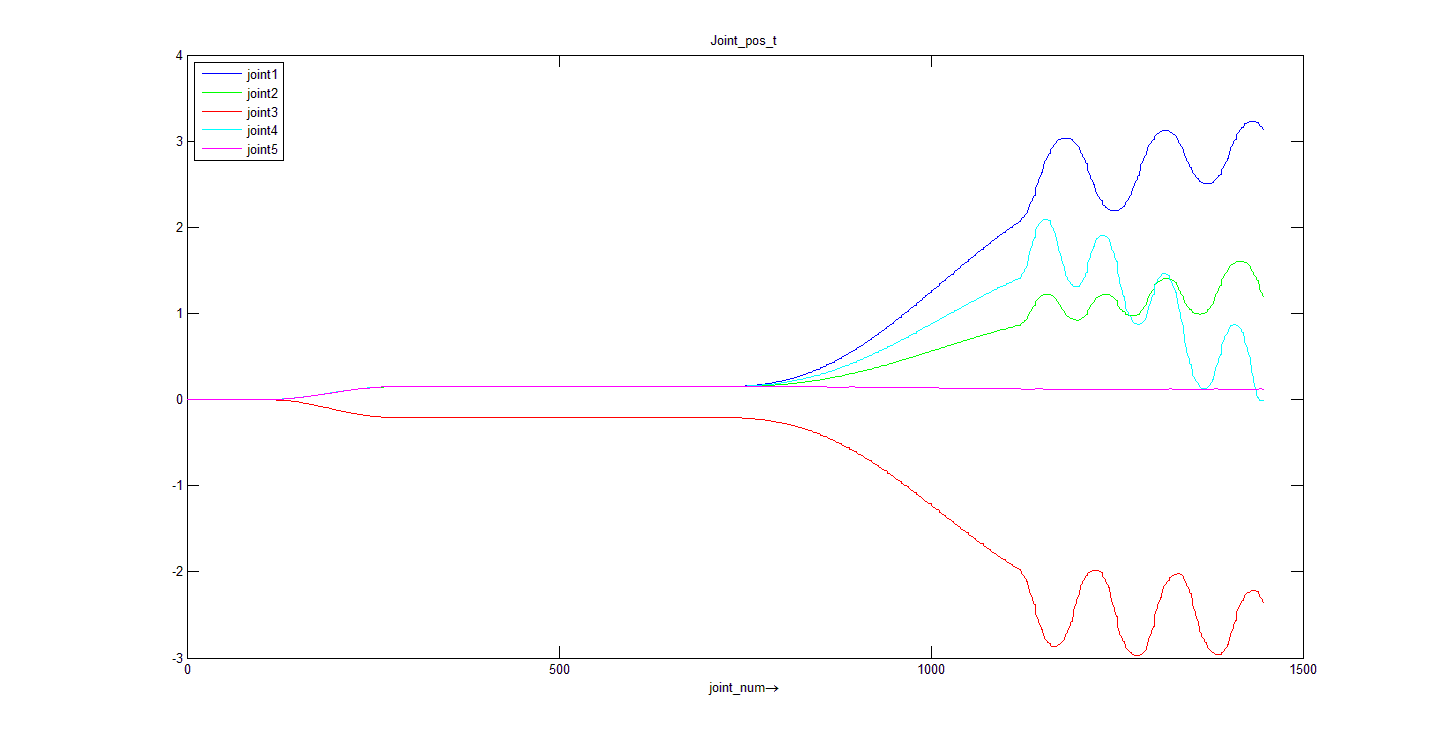
- rqt_plot /joint_states/position[0]:position[1]:position[2]:position[3]:position[4]
得到的图像
图像很好看,但是实际分析起来是很头疼的,它只能是看个大概过程,了解基本曲线的动作和大概的规律,比如速度曲线的不平滑,关节位置曲线的大概变动范围(起始位置并不是0,依次是0.11,0.11,-0.11,0.11,0.12 rad)
3.Matlab绘图
其实,这个地方我也走了点弯路的,当时我用命令
- rostopic echo /joint_states
显示命令到terminal中,然后等到动作结束,用鼠标拷贝出来到txt文件,而且,最重要的问题是,由于滚屏,你只能拷贝部分运动信息,很快就舍弃这种做法了。后来,就想起以前用命令行重定向将信息保存到了文本中,于是就很好的解决了数据保存问题。
- rostopic echo /joint_states > record2.txt
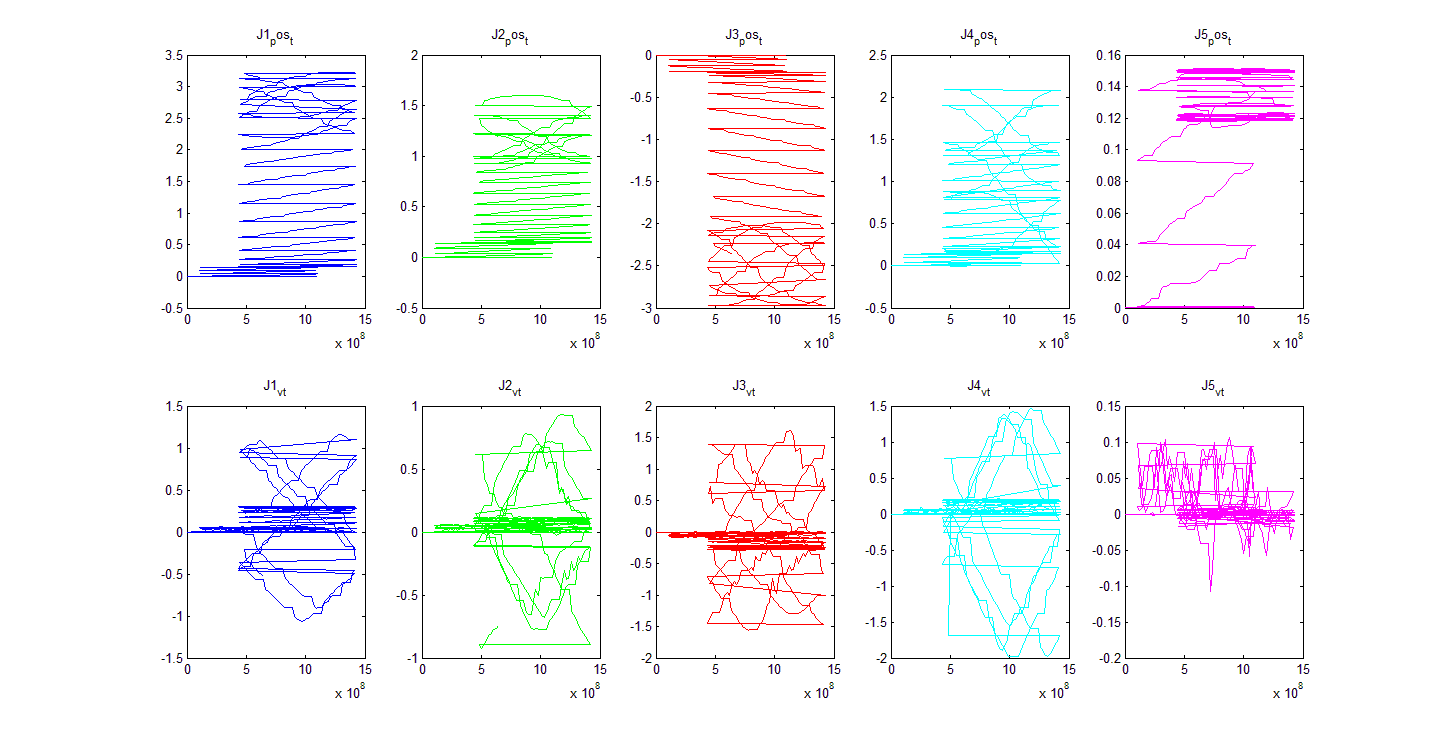
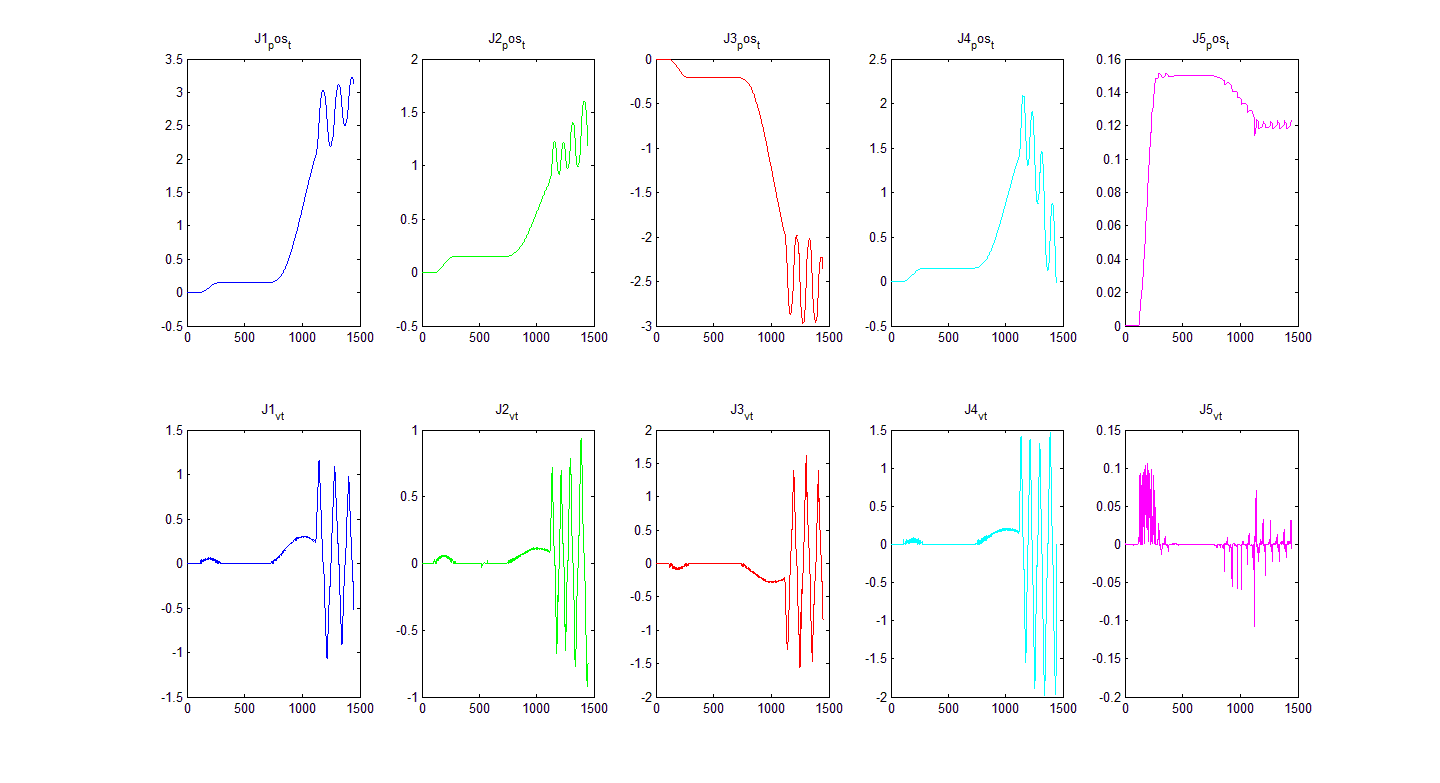
将txt文件拷贝出来到windows上,导入excel文件,然后借助Matlab分析(这里主要是用到了seq,position和velocity)
有同学可能就会问了,明明文件中有时间信息,人家还精确到了ns,干嘛不用呢,这里有个小插曲,当时用matlab读取的时候,由于Linux系统中的时间戳信息是从1970年的秒数开始计算的,数据长度很大,导致Matlab处理的时候直接用科学计数法来统计,后面的几位数都直接给过滤掉了,因而导致画出来的图明显不符合逻辑,一个时间点对应多个关节值。
因此,由于每个数据点都有自己的标号,我就简化为关节信息和点序号的对应信息了。
4. 总结
这里只是把自己的一些过程展示出来,抛砖引玉,具体的数据分析,后面还有待进一步深入。我还没有找其他的机械臂对比一下速度曲线,youbot的跟我预想的不太一样,也可能是由于参数信息的设置导致的,后面我会继续深入下去。
另外,借助于ROS本身的rqt_plot,我们看到数据图像,与matlab基本相同,对于,只是想看看大概规律来说,功能也够用了。
————————————————————————
2016.03更新
————————————————————————
- %%
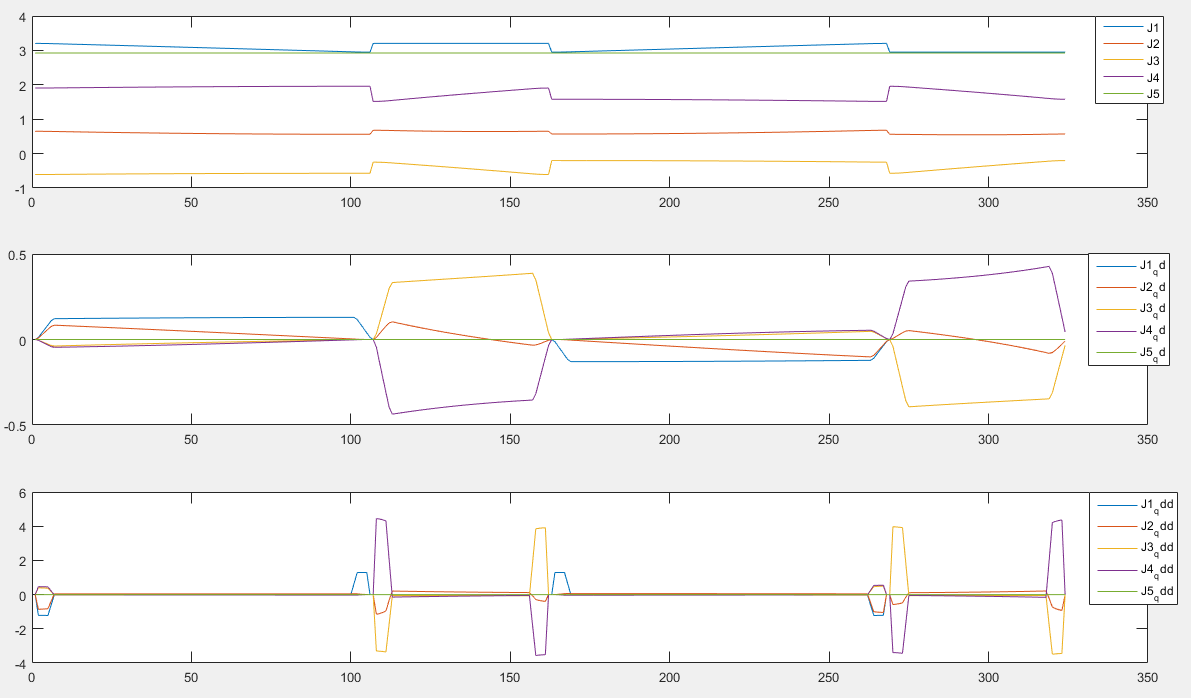
- %Analysis for youbot joint states created by torque control service.
- %%
- clear;
- clc;
- clf;
- filename = 'ik_service.txt';
- startRow = 2;
- ALL_LINES = 1296 ;
- endRow = ALL_LINES + 1; % all line +1
- INTERVAL = 4;
- ikserviceori = importfile(filename, startRow, endRow);
- t_index_colume = 1: INTERVAL : ALL_LINES;
- t_value = ikserviceori(t_index_colume, 1) ;
- q_start_line = 2;
- j1_rank =q_start_line: INTERVAL: ALL_LINES;
- j1_pos_index = ikserviceori ( j1_rank, 5) ;
- j2_rank = q_start_line: INTERVAL: ALL_LINES;
- j2_pos_index = ikserviceori ( j2_rank, 4) ;
- j3_rank = q_start_line: INTERVAL: ALL_LINES;
- j3_pos_index = ikserviceori ( j3_rank, 3) ;
- j4_rank = q_start_line: INTERVAL: ALL_LINES;
- j4_pos_index = ikserviceori ( j4_rank, 2) ;
- j5_rank = q_start_line: INTERVAL: ALL_LINES;
- j5_pos_index = ikserviceori ( j5_rank, 1) ;
- subplot(3,1,1); xlabel('Time'); ylabel('q');
- % grid on;
- plot(t_value, j1_pos_index);
- hold on;
- plot(t_value, j2_pos_index);
- hold on;
- plot(t_value, j3_pos_index);
- hold on;
- plot(t_value, j4_pos_index);
- hold on;
- plot(t_value, j5_pos_index);
- hold on;
- legend('J1','J2','J3', 'J4','J5','location','northeast');
- %%
- qd_start_line = 3;
- j1_qd_rank = qd_start_line: INTERVAL: ALL_LINES;
- j1_qd_index = ikserviceori ( j1_qd_rank, 5) ;
- j2_qd_rank = qd_start_line: INTERVAL: ALL_LINES;
- j2_qd_index = ikserviceori ( j2_qd_rank, 4) ;
- j3_qd_rank = qd_start_line: INTERVAL: ALL_LINES;
- j3_qd_index = ikserviceori ( j3_qd_rank, 3) ;
- j4_qd_rank = qd_start_line: INTERVAL: ALL_LINES;
- j4_qd_index = ikserviceori ( j4_qd_rank, 2) ;
- j5_qd_rank = qd_start_line: INTERVAL: ALL_LINES;
- j5_qd_index = ikserviceori ( j5_qd_rank, 1) ;
- subplot(3,1,2); xlabel('Time'); ylabel('qd');
- % grid on;
- plot(t_value, j1_qd_index);
- hold on;
- plot(t_value, j2_qd_index);
- hold on;
- plot(t_value, j3_qd_index);
- hold on;
- plot(t_value, j4_qd_index);
- hold on;
- plot(t_value, j5_qd_index);
- legend('J1_qd','J2_qd','J3_qd', 'J4_qd','J5_qd','location','northeast');
- %%
- qdd_start_line = 4;
- j1_qdd_rank = qdd_start_line: INTERVAL: ALL_LINES;
- j1_qdd_index = ikserviceori ( j1_qdd_rank, 5) ;
- j2_qdd_rank = qdd_start_line: INTERVAL: ALL_LINES;
- j2_qdd_index = ikserviceori ( j2_qdd_rank, 4) ;
- j3_qdd_rank = qdd_start_line: INTERVAL: ALL_LINES;
- j3_qdd_index = ikserviceori ( j3_qdd_rank, 3) ;
- j4_qdd_rank = qdd_start_line: INTERVAL: ALL_LINES;
- j4_qdd_index = ikserviceori ( j4_qdd_rank, 2) ;
- j5_qdd_rank = qdd_start_line: INTERVAL: ALL_LINES;
- j5_qdd_index = ikserviceori ( j5_qdd_rank, 1) ;
- subplot(3,1,3); xlabel('Time'); ylabel('qdd');
- % grid on;
- plot(t_value, j1_qdd_index);
- hold on;
- plot(t_value, j2_qdd_index);
- hold on;
- plot(t_value, j3_qdd_index);
- hold on;
- plot(t_value, j4_qdd_index);
- hold on;
- plot(t_value, j5_qdd_index);
- legend('J1_qdd','J2_qdd','J3_qdd', 'J4_qdd','J5_qdd','location','northeast');
















 5154
5154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









