







基于该篇博客https://blog.csdn.net/qq_34935373/article/details/103481401,实现了通过ROS节点的方式启动ATI sensor,完成配置归零和设置软件矢量偏移,并且获取六轴数据,实时的打印在终端上。但是由于数据的刷新非常迅速,人眼很难捕捉到所有信息,所以想着能不能通过python库或者ROS插件完成数据的可视化。
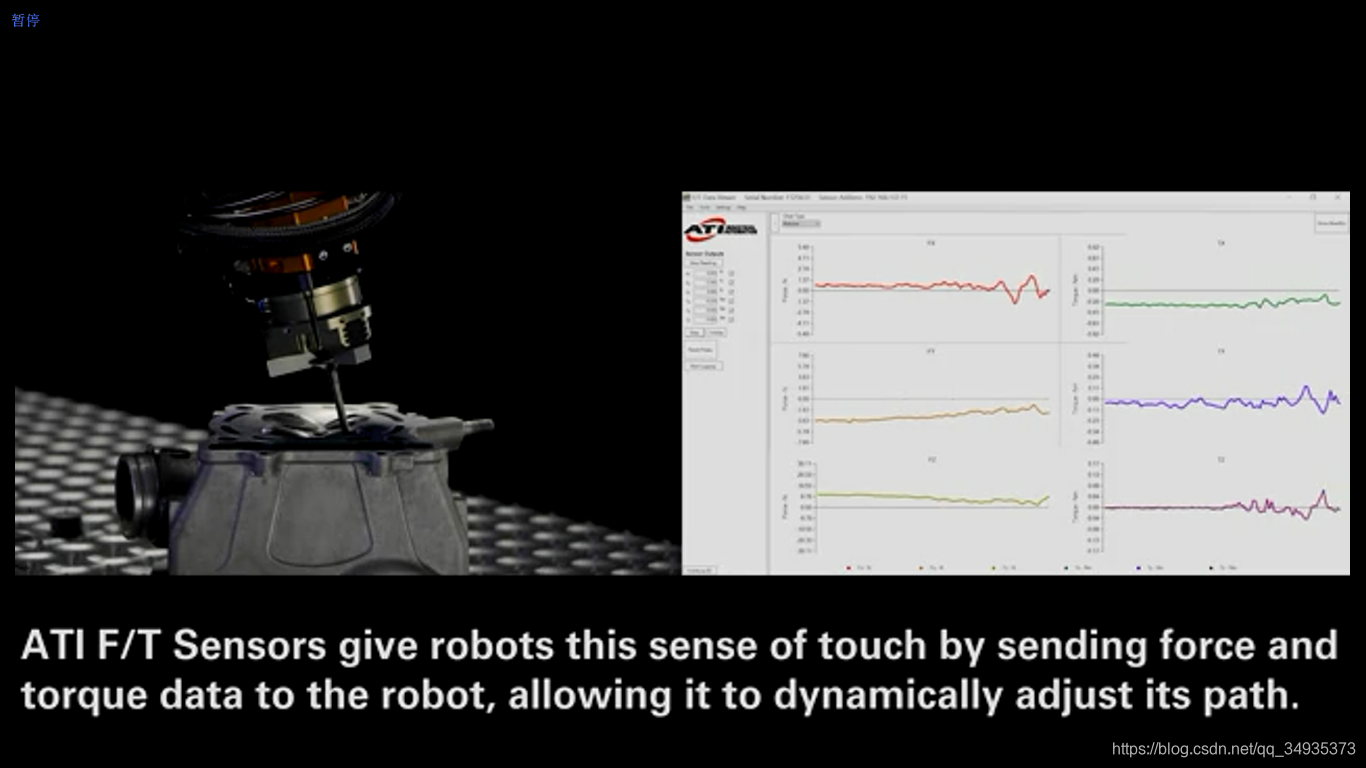
偶然看到了ATI结合UR的自动装配视频,感觉这个界面很nice,官网找了半天却也没找到。
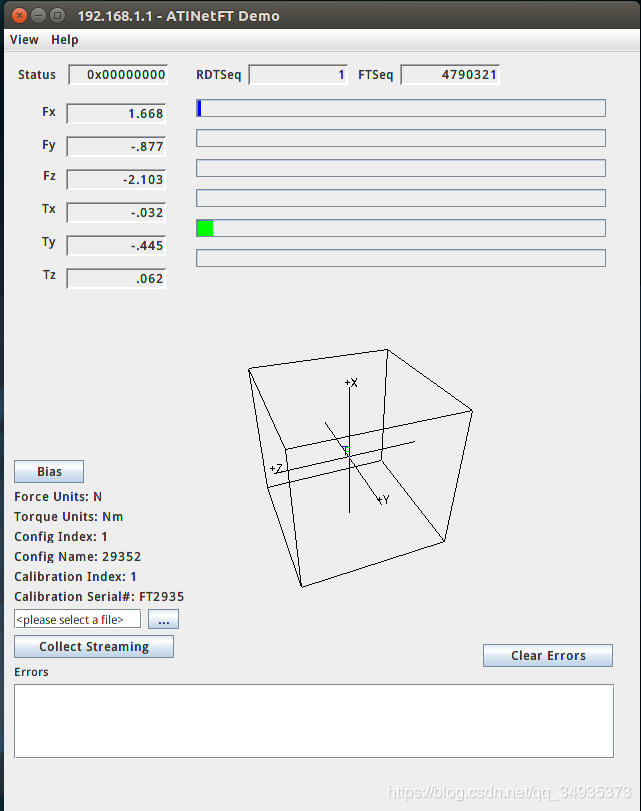
之前的java版的可视化界面虽然也不错,但是却很难集成在ROS当中,于是我尝试了pyqtgraph这个python库。
1.PyQtGraph的安装:
$ pip install pyqtgraph2.PyQtGraph样例:
$ ipython3
$ import pyqtgraph.examples
$ pyqtgraph.examples.run()3.PyQtGraph测试:
会显示一个界面,提供了各种demo和代码。复制修改成自己的即可。

复制上述代码,稍作修改运行(一共三个update函数,主要就修改了第一个,看看效果),效果如下:
# -*- coding: utf-8 -*-
import pyqtgraph as pg
from pyqtgraph.Qt import QtCore, QtGui
import numpy as np
win = pg.GraphicsWindow()
win.setWindowTitle('ATI F/T sensor data')
label = pg.LabelItem(justify='right 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1564
1564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









