







描述关节的运动学和动力学属性。描述关节的运动范围。
示例如下:
<joint name="my_joint" type="floating"> 关节的名称、类型
<origin xyz="0 0 1" rpy="0 0 3.1416"/> 变换矩阵:位置、角度
<parent link="link1"/> 关节连接的父连杆
<child link="link2"/> 关节连接的子连杆
<calibration rising="0.0"/>
<dynamics damping="0.0" friction="0.0"/> 阻尼、静摩擦
<limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" /> 极限值:最大力矩、最大速度、关节下限、关节上限
<safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0"
soft_upper_limit="0.5" />
</joint>
属性
1、name (required)
定义关节的名字(唯一)
2、type (required)
定义关节类型,可选项有:
revolute - 旋转关节,其极限位置由 upper and lower limits 决定
continuous - 旋转关节,无位置限制
prismatic - 滑动关节,其极限位置由 upper and lower limits 决定
fixed - 虚拟关节,关节不可运动
floating - 六自由度关节
planar - 平面关节
组件
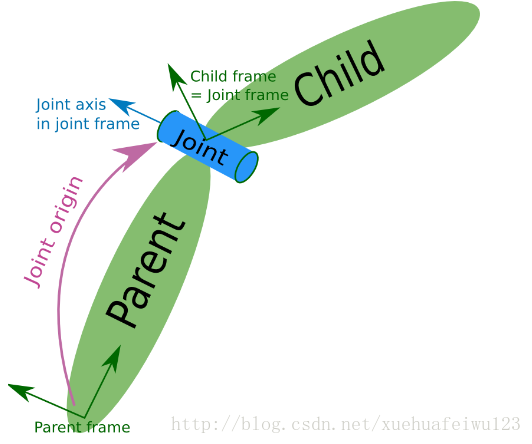
< origin> (optional: defaults to identity if not specified)
父连杆和子连杆的转换矩阵。关节位于子连杆的坐标原点处,
- xyz
描述 x,y,z 坐标的偏置量
- rpy
描述绕固定轴的旋转量,按照 x,y,z 轴的顺序。
< parent> (required)
父连杆
- link
父连杆的名字
< child>(required)
子连杆
- link
子连杆的名字
< axis>(optional: defaults to (1,0,0))
关节坐标系中,关节轴的坐标。
- xyz
关节轴的描述(正交向量)
< calibration> (optional)
关节的参考位置,用来校准关节的绝对位置
- rising (optional)
关节正向运动,参考位置出发上升沿
- falling (optional)
关节反向运动,参考位置出发下降沿
< dynamics> (optional)
描述关节的物理属性。经常用来详述建模属性,特别是对仿真必不可少
- damping (optional, defaults to 0)
关节的物理阻尼值
- friction (optional, defaults to 0)
关节的物理静摩擦力
< limit> (required only for revolute and prismatic joint)
用来描述运动的一些极限值
- lower (optional, defaults to 0)
关节位置下限
- upper (optional, defaults to 0)
关节位置上限
- effort (required)
关节的最大力矩
- velocity (required)
关节的最大速度
< mimic> (optional)
用来描述现在定义的关节与已经存在的关节的关系
其值可以用下式计算:
- joint (required)
被模仿的关节名称
- multiplier (optional)
乘积因子的数值,默认1
- offset (optional)
偏置量,默认0
< safety_controller> (optional)
描述安全控制器参数
- soft_lower_limit (optional, defaults to 0)
安全控制器运行时,关节的位置极限下界,其值应大于 lower joint limit
- soft_upper_limit (optional, defaults to 0)
安全控制器运行时,关节的位置极限上界,其值应小于 upper joint limit
- k_position (optional, defaults to 0)
位置和速度极限之间的关系
- k_velocity (required)
力矩和速度之间的关系

















 1363
1363

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









