







Color ICP
Colored point cloud registration — Open3D 0.11.0 documentation
Colored point cloud registration - Open3D 0.18.0 documentation
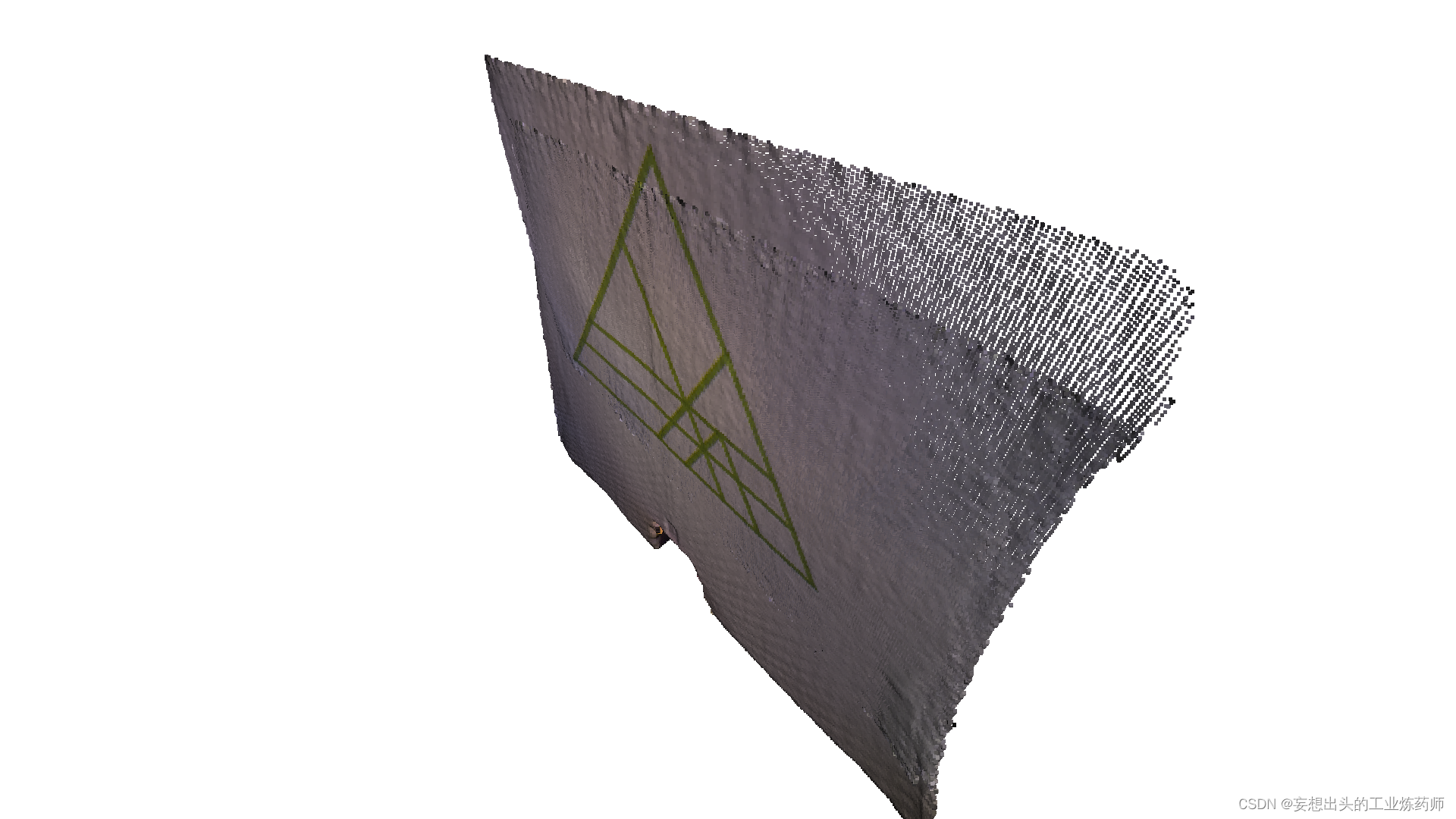
展示了使用color-icp结果
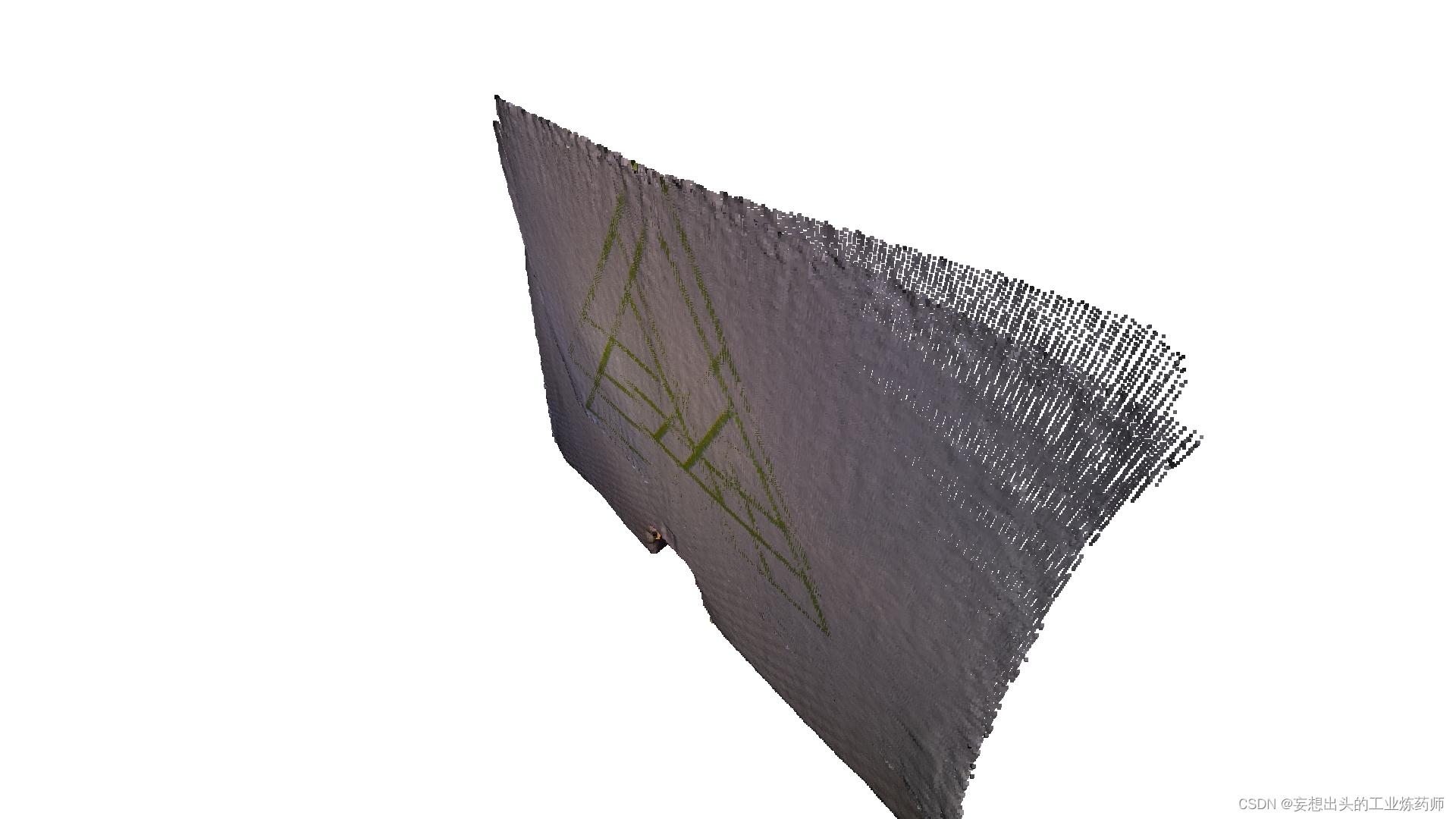
对比gicp错误处理结果
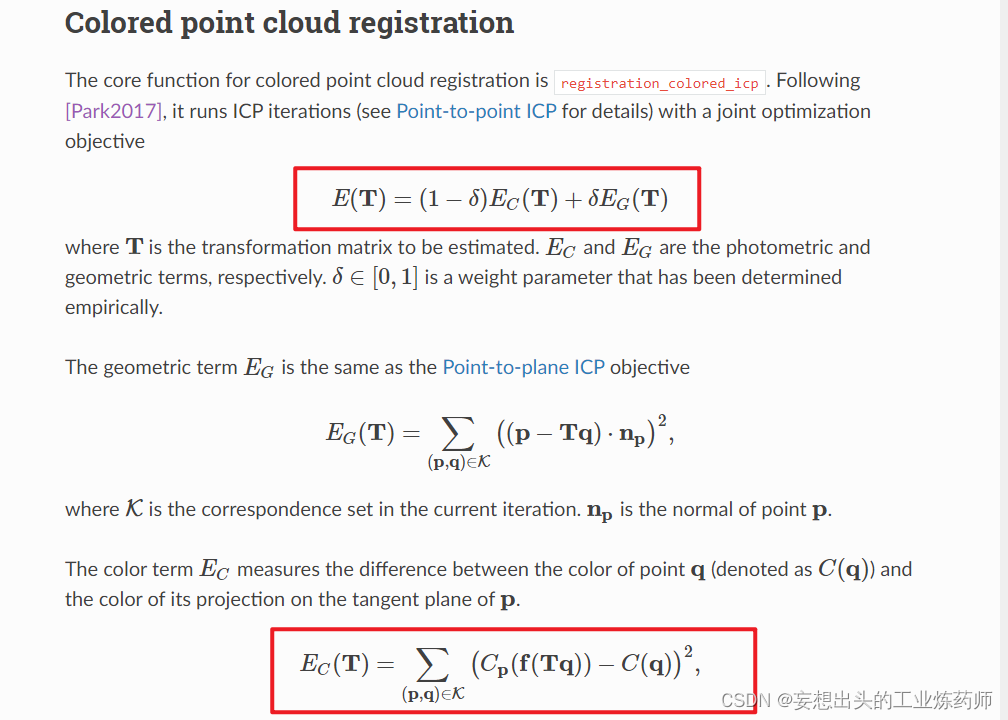
intel自己的论文
Colored Point Cloud Registration Revisited
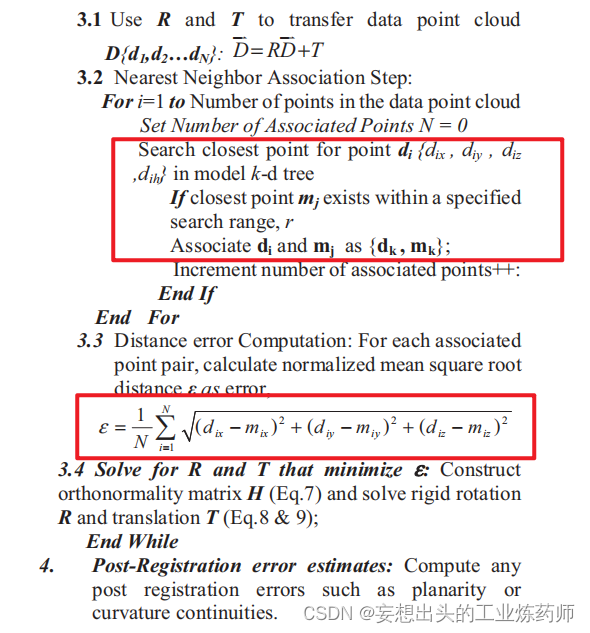
优化方程
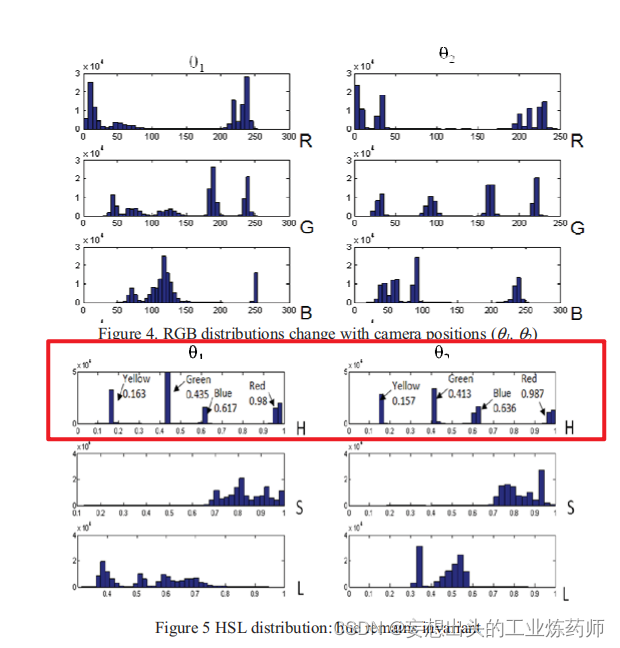
参考论文:
Color point cloud registration with 4D ICP algorithm
指定最小点数的体素滤波
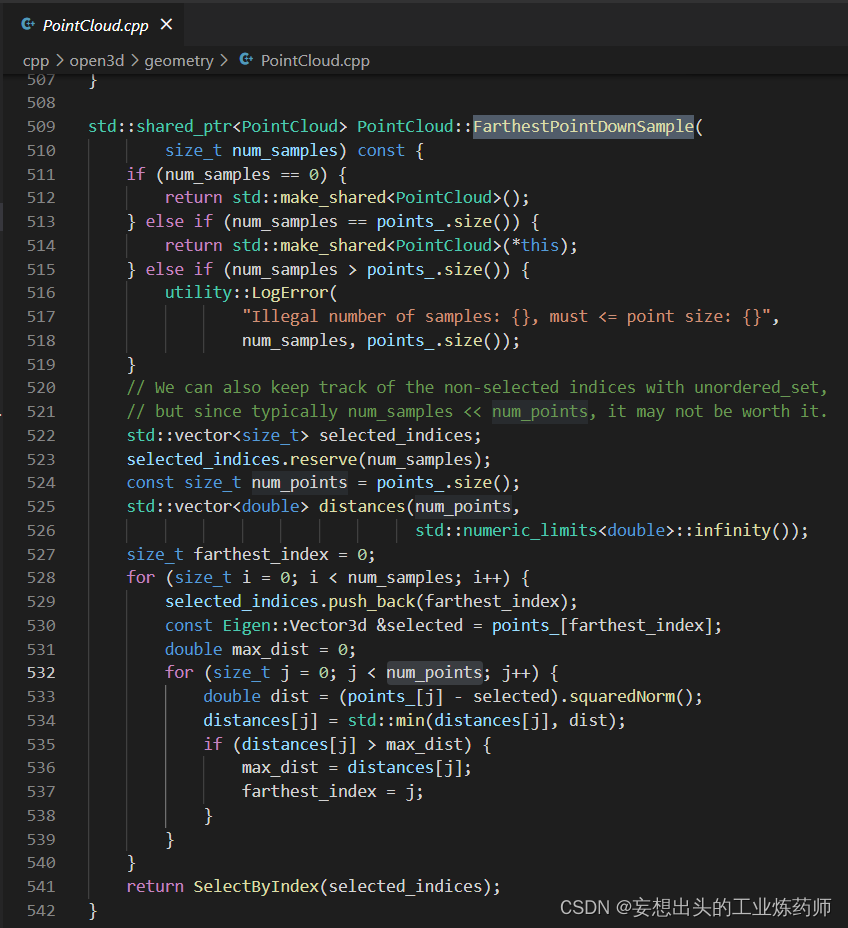
最远点降采样
最远点采样介绍及CUDA实现分析 - cbw052 - 博客园 (cnblogs.com)















 584
584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









