







ROS机器人程序设计(原书第2版)补充资料 (叁) 第三章 可视化和调试工具
书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用。
~$ roslaunch turtlebot_gazebo turtlebot_world.launch
~$ roslaunch turtlebot_gazebo gmapping_demo.launch
~$ roslaunch turtlebot_rviz_launchers view_navigation.launch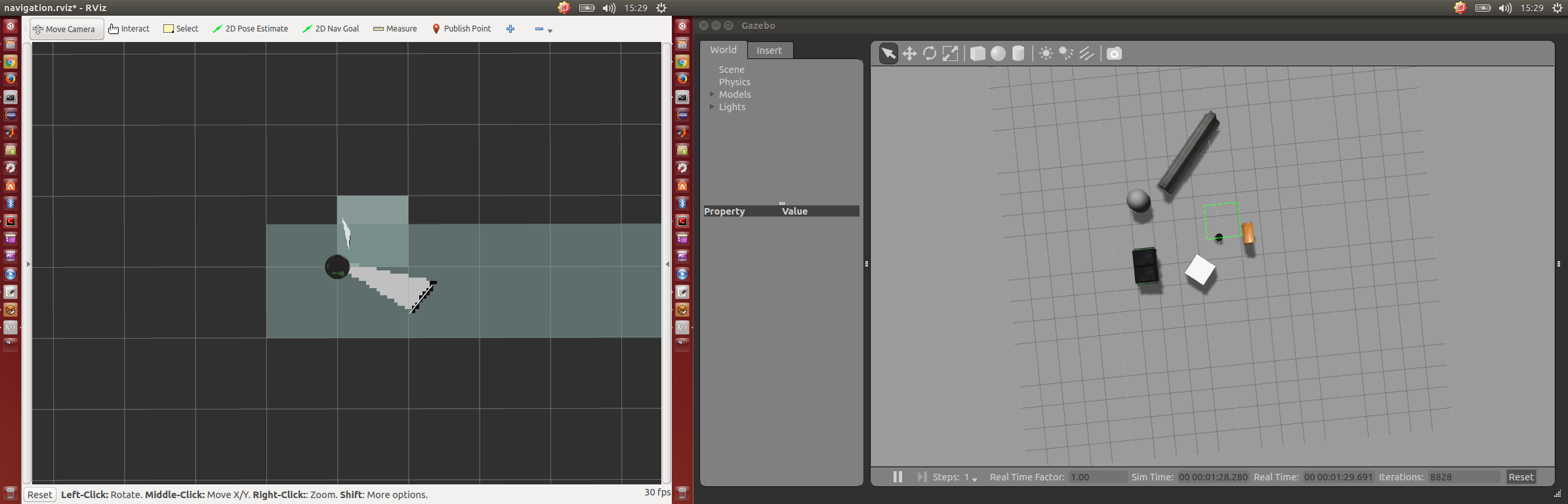
补充参考:http://blog.csdn.net/zhangrelay/article/details/49902905
第55-56页:
给出一个例子。可以用turtlebot替代,如上。
第57-58页:
调试ROS节点。
注意:.launch中配置launch-prefix=" * ",以及output=" screen "等。
第59-66页:
日志信息。第60页第一行,删去$。
调试消息级别。
rqt_console和rqt_logger_level。
在hydro,indigo,jade,kinetic类似。
第67-70页:
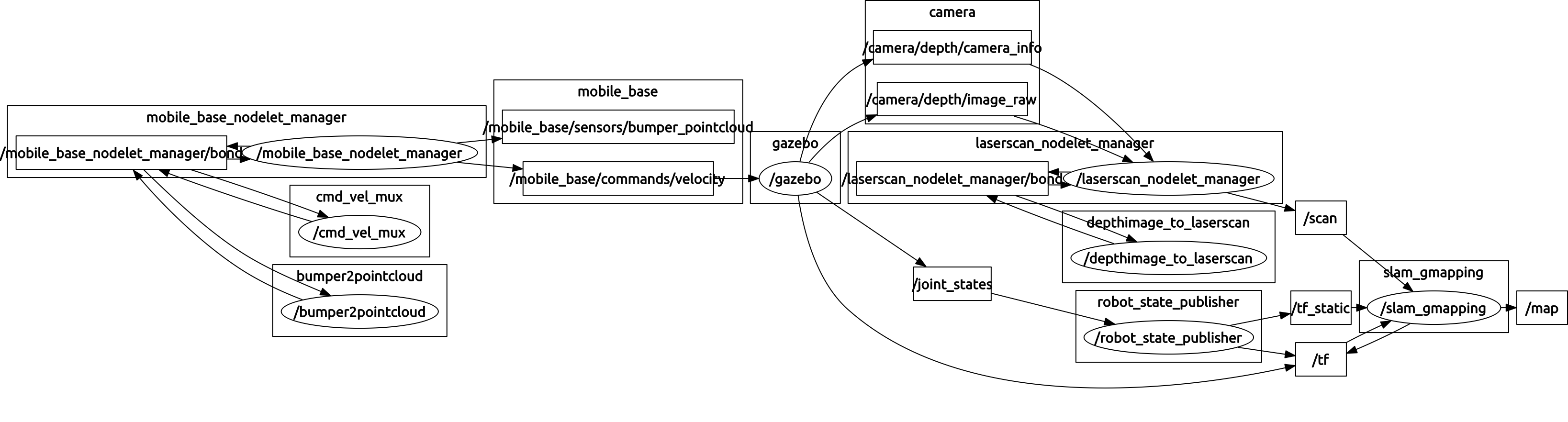
检测系统状态,rqt_top,rqt_topic,rqt_publisher,rqt_service_caller,rqt_graph等。
rqt_ez_publisher:https://github.com/OTL/rqt_ez_publisher
有hydro,indigo,jade,kinetic四种版本可以选择,选择合适的编译使用。
第71页:
设置动态参数,rqt_reconfigure。
第72-73页:
roswtf。
第74页:
可视化节点诊断,rqt_runtime_monitor。
第75-76页:
绘制曲线图,rqt_plot。
第77-78页:
图像可视化。
~$ roslaunch usb_cam usb_cam-test.launch可以查看笔记本摄像头数据,如下:

第79-83页:
3D可视化,使用rviz。
第84-87页:
数据记录和回放,rosbag。
第88页:
其他rqr_*。
第89页:
本章小节。
思考与巩固:
1 熟练掌握ROS中rqt_*的具体使用,全部指令如下:
rqt_action rqt_pose_view
rqt_bag rqt_publisher
rqt_bag_plugins rqt_py_common
rqt_console rqt_py_console
rqt_dep rqt_reconfigure
rqt_graph rqt_robot_dashboard
rqt_gui rqt_robot_monitor
rqt_gui_cpp rqt_robot_steering
rqt_gui_py rqt_runtime_monitor
rqt_image_view rqt_rviz
rqt_joint_trajectory_controller rqt_service_caller
rqt_launch rqt_shell
rqt_logger_level rqt_srv
rqt_moveit rqt_tf_tree
rqt_msg rqt_top
rqt_nav_view rqt_topic
rqt_plot rqt_web
















 203
203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











